IMU和GPS数据融合估计位置与速度(MATLAB实现)
简介假设小车在一个方向上以 2cm/s2 的加速度运动了 100s,使用加速度计和GPS测量小车位置。GPS定位误差为高斯分布,方差为4m;加速度计的误差也为高斯分布,方差为0.01m/s2,并且由于加速度计放置不是完全水平的,有 0.03m/s2 的偏移。采用卡尔曼滤波,融合加速度计和GPS数据,估计小车的位置与速度。1. 问题如果只使用GPS数据估计,卡尔曼滤波器MATLAB实现(从...
一、问题与仿真
假设小车在一个方向上以 2cm/s2 的加速度运动了 100s,使用加速度计和GPS测量小车位置。GPS定位误差为高斯分布,方差为4m;加速度计的误差也为高斯分布,方差为0.01m/s2,并且由于加速度计放置不是完全水平的,有 0.03m/s2 的偏移。采用卡尔曼滤波,融合加速度计和GPS数据,估计小车的位置与速度。
如果只使用GPS数据估计,卡尔曼滤波器MATLAB实现(从一维到三维)一文给出了基本理论与测试效果。如果只使用加速度计数据,理论上系统是不可观的,也即不能稳定估计小车的速度,偏移误差将不断累积。
在小车运动中,已知加速度计数据和GPS定位数据,加速度计和GPS数据都有一定误差,如何融合数据,估算出小车的位置与速度?融合传感器数据真的能提高数据精确度吗?本文将作简单测试验证。
二、系统模型与卡尔曼滤波
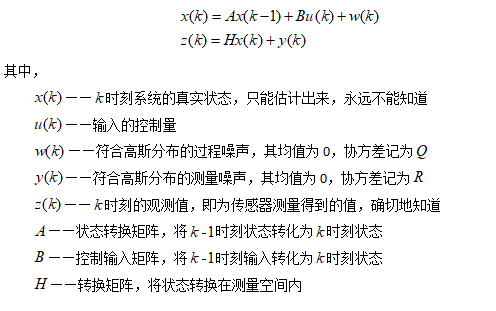
2.1 系统模型

2.2 卡尔曼滤波公式

在此例子中,各变量取值如下

可见,在预测过程使用加速度计获取的数据,在滤波过程使用GPS数据。
三、仿真分析
位移结果如下,滤波后方差变为原来 1/10.

速度估计结果如下图。图中蓝色点为使用滤波后位移直接差分得到的结果,但是误差很大。其实,这样是不科学的,因为随着采样频率增加,单位时间内位移 dt 滤波的误差不会变化,但是 v=ds/dt,dt 随采样频率减小,误差会越大。而采用卡尔曼滤波的结果,误差较小。

四、实测数据与仿真
4.1 仿真分析
将大疆无人机带出去,获取加速度度与GPS数据,以及飞控计算的速度与位置。将使用自己写的卡尔曼滤波器计算位置与速度,与大疆的结果对比。
结果如下


可见,只使用加速度积分计算速度与位置,会随着时间不断漂移。使用加速度与GPS数据融合,能够很好地避免数据漂移。
从图中还可见,DJI的GPS并没有很大的误差,几乎在20cm以内,很可能将原始GPS数据滤波。
4.2 补充细节
-
从之前的原理及程序还可以得知,估计位置与速度,并不需要测量速度加入卡尔曼滤波(当然有的话更好),加速度与GPS位移一起就能估算出速度与位移。
-
注意此处的加速度,已经转换到地球坐标系下。直接使用加速度计获取的数据是不行的,加速度计是在机体坐标系下。转换关系为
a e = R a b a_e = R a_b ae=Rab
a b a_b ab 为机体系下加速度,即加速度计测量结果; R R R为机体系到地球系的旋转矩阵; a e a_e ae 为地球系下的加速度。 -
GPS获得经纬度,如果已知两点的经纬度分别为 ( α 1 , β 1 ) , ( α 2 , β 2 ) (\alpha_1, \beta_1), (\alpha_2, \beta_2) (α1,β1),(α2,β2),采用东北天坐标系,计算其 x y xy xy 之间的位移分别为
d x = ( α 2 − α 1 ) ⋅ r ⋅ cos β 2 d y = ( β 2 − β 1 ) ⋅ r \begin{aligned} &d_x = (\alpha_2 - \alpha_1) \cdot r \cdot \cos\beta_2 \\ &d_y = (\beta_2 - \beta_1) \cdot r \end{aligned} dx=(α2−α1)⋅r⋅cosβ2dy=(β2−β1)⋅r
其中, r = 6378137 r=6378137 r=6378137 为地球半径。
代码与姿态估计参考链接:

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 53
53 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)