基于RBF神经网络的非线性系统识别(Matlab代码实现)
在此仿真中,实现了用于非线性系统的零阶近似的RBF-NN。模拟包括蒙特卡罗模拟设置和 RBF NN 代码。对于系统估计,使用具有固定中心和扩散的高斯核。而 RBF-NN 的权重和偏差使用基于梯度下降的自适应学习算法进行优化。
💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
💥1 概述
在此仿真中,实现了用于非线性系统的零阶近似的RBF-NN。模拟包括蒙特卡罗模拟设置和 RBF NN 代码。对于系统估计,使用具有固定中心和扩散的高斯核。而 RBF-NN 的权重和偏差使用基于梯度下降的自适应学习算法进行优化。
一、引言
非线性系统对象辨识是控制领域中一个重要的问题,对于实现系统建模和控制具有重要意义。RBF神经网络(Radial Basis Function Neural Network)是一种常用于模式识别和函数逼近的人工神经网络模型,通过利用径向基函数来构建隐藏层节点,这些节点对输入数据进行非线性映射,能够有效地处理非线性系统对象的辨识问题。本研究旨在通过基于RBF神经网络的非线性系统对象辨识,探索一种新颖的方法来解决非线性系统辨识中存在的挑战和问题。
二、RBF神经网络基本原理
RBF神经网络是一种具有单隐层的三层前馈网络,其结构和学习算法与BP网络有着很大的差别。RBF神经网络模拟人脑中局部整理、相互覆盖接收域的神经网络结构,是一种具有全局逼近性能的前馈网络。它利用径向基函数来构建隐藏层节点,这些节点对输入数据进行非线性映射,将输入数据映射到一个高维空间中,然后再经过输出层节点进行线性组合,得到最终的输出结果。
在RBF神经网络中,隐藏层节点与输入层节点之间的连接权值代表了输入数据与隐藏层节点之间的空间关系,而输出层节点与隐藏层节点之间的连接权值则表示了隐藏层节点与输出数据之间的关系。通过调整这些连接权值,网络可以学习输入数据之间的复杂关系,从而实现非线性函数逼近的功能。
三、非线性系统对象辨识方法
非线性系统对象辨识是指通过观测系统的输入和输出,利用数学模型来描述系统的动态特性和结构。基于RBF神经网络的非线性系统对象辨识方法,其基本思路是通过训练RBF神经网络来模拟非线性系统的输入输出关系,并根据网络的权重和偏置参数来辨识系统的动态特性。
具体步骤如下:
- 确定RBF神经网络的结构,包括输入层、隐藏层和输出层的神经元数目,以及隐藏层的激活函数和输出层的线性组合。
- 利用训练数据集对网络进行训练,通过反向传播算法来调整网络的权重和偏置参数,使得网络的输出尽可能接近真实系统的输出。
- 在训练过程中,可以采用交叉验证的方法来选择网络的参数,以提高辨识的准确性和泛化能力。
- 引入正则化项来避免过拟合问题,并对网络进行模型选择和特征提取,以进一步提高系统对象辨识的效果。
四、实验验证与结果分析
实验验证是对基于RBF神经网络的非线性系统对象辨识算法进行实际验证和验证结果分析的重要步骤。在进行实验验证时,需要选择适当的实验数据集,并确保数据具有一定的随机性和代表性。然后,将数据输入到设计的RBF神经网络模型中进行训练和测试,以验证网络的准确性和有效性。
通过实验验证,可以验证模型的有效性,并对非线性系统对象辨识算法进行改进和优化。结果分析部分主要对基于RBF神经网络的非线性系统对象辨识算法所得到的实验结果进行深入分析和讨论,包括准确率、均方误差等指标的计算和比较,以及模型的泛化能力和稳定性的评估。
五、结论与展望
基于RBF神经网络的非线性系统对象辨识算法具有较高的逼近性和泛化能力,能够有效地识别复杂的非线性系统,并在实际控制过程中发挥重要作用。本研究将有助于提高非线性系统的辨识准确性和预测性能,对于工程控制和优化具有一定的实用价值。
未来研究方向可以进一步探索RBF神经网络与其他优化算法的结合,以提高系统辨识的效率和准确性;同时,也可以将基于RBF神经网络的非线性系统辨识方法应用于更广泛的领域,如机器人控制、自动驾驶等。
📚2 运行结果
部分代码:
% Random initialization of the RBF weights/bias
W1 = randn(1,n1);
b = randn();
for k=1:epochs
for i1=1:len
% Calculating the kernel matrix
for i2=1:n1
% Euclidean Distance / Gaussian Kernel
ED(i1,i2)=exp((-(norm(x(i1)-c(i2))^2))/beeta^2);
end
% Output of the RBF
y(i1)=W1*ED(i1,:)'+b;
% Desired output + noise/disturbance of measurement
d(i1)= h(1)*x(i1+2) +h(2)*x(i1+1)+h(3)*x(i1)+h(4)*(cos(h(5)*x(i1+2)) +exp(-abs(x(i1+2))))+sqrt(noise_var)*randn();
% Instantaneous error of estimation
e(i1)=d(i1)-y(i1);
% Gradient Descent-based adaptive learning (Training)
W1=W1+learning_rate*e(i1)*ED(i1,:);
b=b+learning_rate*e(i1);
end
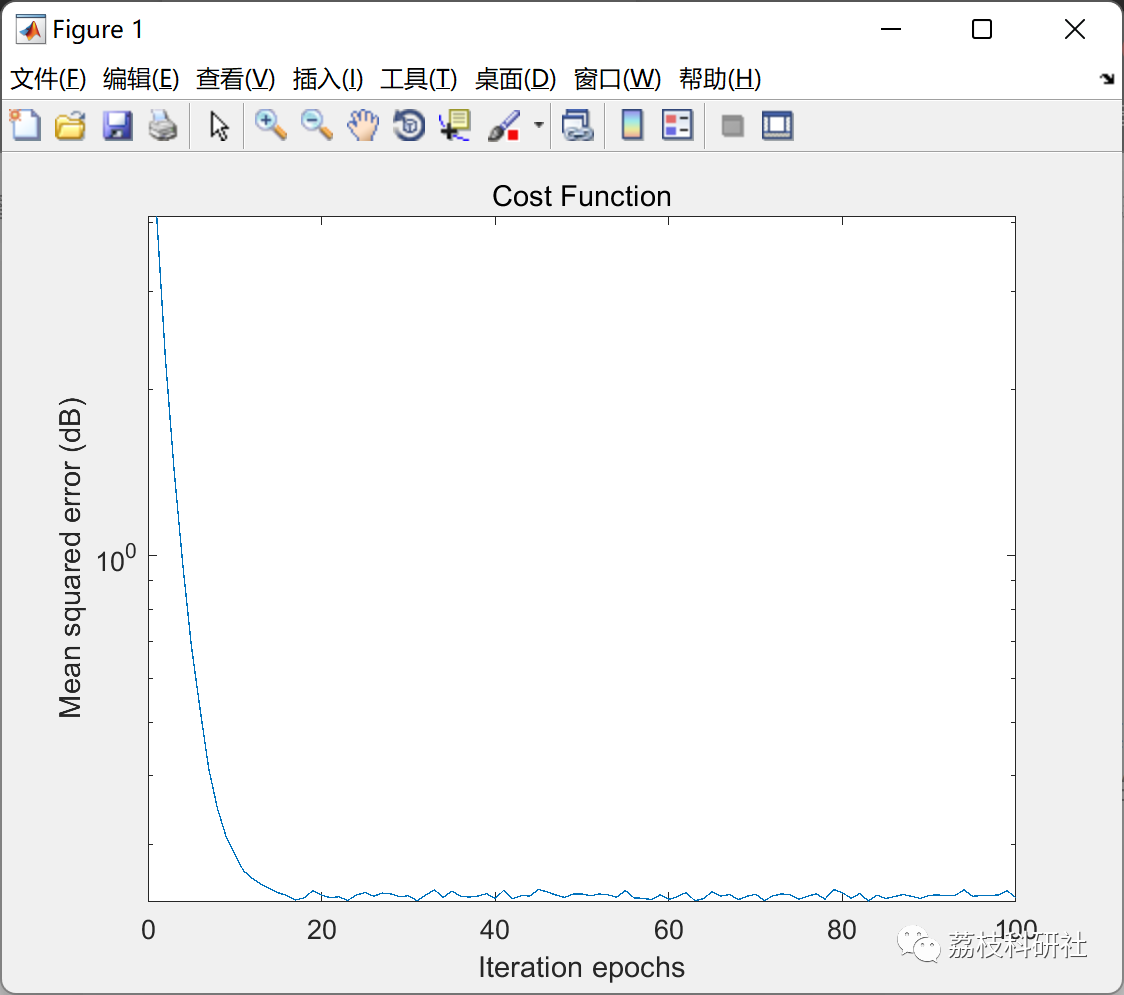
MSE_epoch(k) = mse(e); % Objective Function (to be minimized)
end
MSE_train=MSE_train+MSE_epoch; % accumulating MSE of each epoch
epoch_W1=epoch_W1 + W1; % accumulating weights
epoch_b=epoch_b + b; % accumulating bias
end
MSE_train=MSE_train./runs; % Final training MSE after #runs of independent simulations
W1=epoch_W1./runs; % Final Weights after #runs of independent simulations
b=epoch_b./runs; % Final bias after #runs of independent simulations
semilogy(MSE_train); % MSE learning curve
xlabel('Iteration epochs');
ylabel('Mean squared error (dB)');
title('Cost Function')
Final_MSE_train=10*log10(MSE_train(end)); % Final MSE value
%% Test Phase
% Reset input and output
y=0;
d=0;
x=0;
x=[-1*ones(1,delays) ones(1,round(len/4)) -ones(1,round(len/4)) ones(1,round(len/4)) -ones(1,round(len/4))];
x=awgn(x,20);
for i1=1:len
for i2=1:n1
ED(i1,i2)=exp((-(norm(x(i1)-c(i2))^2))/beeta^2);
end
y(i1)=W1*ED(i1,:)'+b;
d(i1)= h(1)*x(i1+2) +h(2)*x(i1+1)+h(3)*x(i1)+h(4)*(cos(h(5)*x(i1+2)) +exp(-abs(x(i1+2))));
e(i1)=d(i1)-y(i1);
end
MSE_test=10*log10(mse(e)); %%% Objective Function
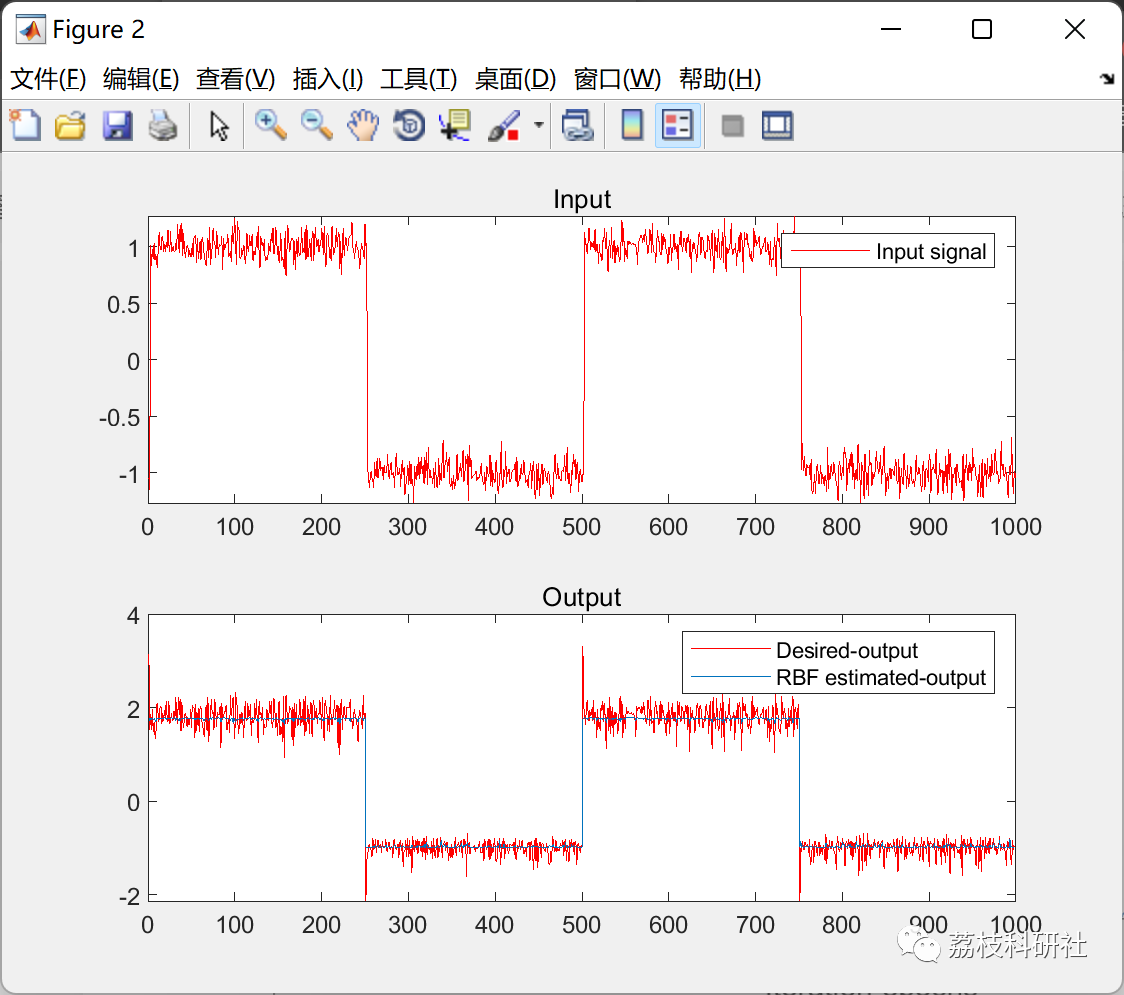
figure
subplot(2,1,1)
plot(x(1:end-delays),'r')
title('Input');
legend('Input signal')
subplot(2,1,2)
plot(d(1:end-delays),'r')
hold on
plot(y(delays+1:end))
title('Output');
legend('Desired-output','RBF estimated-output')
🎉3 参考文献
[1]Khan, S., Naseem, I., Togneri, R. et al. Circuits Syst Signal Process (2017) 36: 1639. doi:10.1007/s00034-016-0375-7
🌈4 Matlab代码实现

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐


 18
18 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)