wheeltec nano Ubuntu/Ros/Rviz小车建图及导航操作
Ros小车操作记录
·
目录
一、小车和上位机共同连接一个WIFI
- 小车开机,连接WIFI(一般自动会连接WHEELTEC那个wifi,可以检查一下),密码:********。(一般为dongguan,别慌~该系统不会显示输入,感觉输入好后按Enter即可)
- 同时,上位机(电脑)也连接该WIFI。
目的及意义:保证网段的一致性,方便后续远程连接小车。
二、配置上位机环境
- 上位机打开终端执行以下命令打开.bashrc文件
sudo gedit .bashrc
- 在.bashrc文件底部中添加如下语句,即可完成配置
export ROS_MASTER_URI=http://小车ip地址
export ROS_HOSTNAME=本机ip地址
export SVGA_VGPU10=0
注: 小车ip地址一般为:192.168.0.100
叫不准的话,ip地址可以在终端输入以下命令查询:
ip a
三、SSH远程登录
在上位机打开终端,输入:
ssh -Y 小车名@小车ip地址
一般为:
ssh -Y wheeltec@192.168.0.100
密码:********(一般为dongguan)
四、在该终端启动建图节点
roslaunch turn_on_wheeltec_robot mapping.launch
五、键盘控制小车行驶建图(也可以用app控制小车行驶)
新建一个终端(Ctrl+Alt+T)、按照步骤三(ssh远程登陆)后,在该终端输入以下命令开启键盘控制节点:
roslaunch wheeltec_robot_rc keyboard_teleop.launch
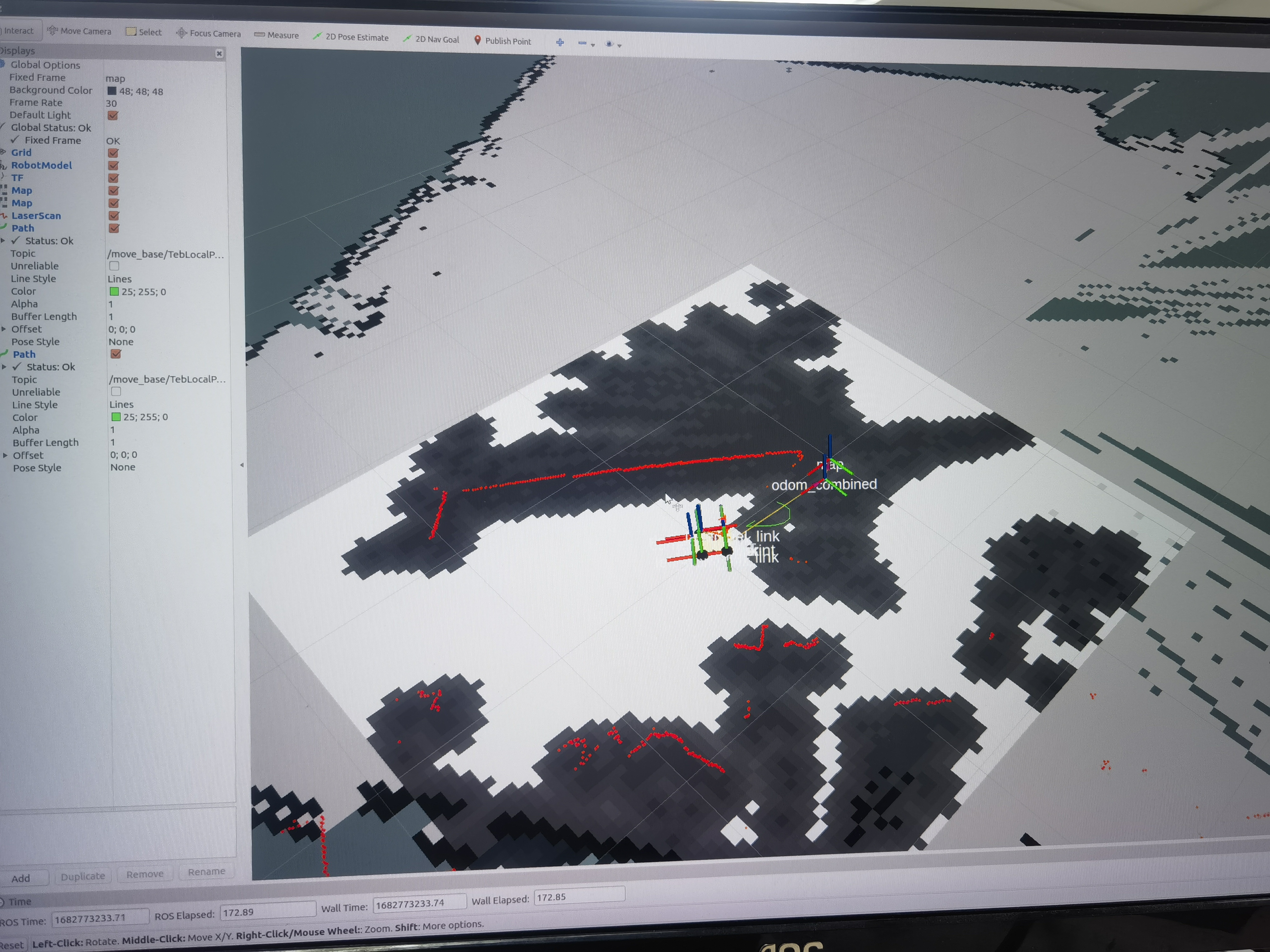
同时打开rviz 添加Map与RobotModel选项
单机键盘控制终端 按照指示按键控制小车行驶建图(边控制行驶,边观察Rviz建图情况)
注: 建图完毕后,不要关闭Rviz!!!
六、保存地图。
新建一个终端,输入以下命令(切换到要保存的目录下):
cd /home/wheeltec/wheeltec_robot/src/turn_on_wheeltec_robot/map
确定后,可以观察到我们进入了该目录(/home/wheeltec/wheeltec_robot/src/turn_on_wheeltec_robot/map)
再输入:
rosrun map_server map_saver -f 地图名称
即可保存当前地图到该目录下 然后退出rviz并终止建图、键盘控制节点的终端即可
注:终止终端命令(Ctrl+c)
七、导航模块中切换地图
在turn_on_wheeltec_robot功能包中launch文件夹中找到navigation.launch
大概在第11行——将其中的WHEELTEC换成之前保存的地图名字
八、启动导航节点。(要将小车放在建图起点)
roslaunch turn_on_wheeltec_robot navigation.launch
打开rviz 手动配置
注:如果不愿意每次都手动配置,可以参考这篇博客:保存Rviz配置 用launch文件启动
注:ssh登录小车,在小车的终端上开启相应节点,但要在上位机的终端开启rviz,小车主控无法承载同时开启节点与rviz

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)