关于矢量控制PI调节器的积分限幅问题的探讨
之前已经谈论了PI调节输出限幅的问题。今天还想再进一步深入讨论PI调节器中,积分器I限幅的问题。(以转速环为例子,电流环分析也同理)
网上已经有很多期内容讲了关于PMSM的PI控制了。
Simulink仿真永磁同步电机FOC,使用电压前馈补偿,电机转速在稳态下电流环PI输出还是很大? - 知乎
电机控制杂谈(1)——电机能否不需要准确的角度位置就可以稳定启动并平稳运行?(针对传统FOC控制,转速环和电流环都采用PI调节器) - 知乎
电机控制杂谈(2)——传统FOC中,电流环调节器的输出需不需要限幅?如果需要的话,那限幅应该为多少? - 知乎
永磁同步电机高性能控制算法(8)——复矢量PI电流环、状态反馈解耦PI电流环、传统PI电流环的对比分析 - 知乎
之前已经谈论了PI调节输出限幅的问题。今天还想再进一步深入讨论PI调节器中,积分器I限幅的问题。(以转速环为例子,电流环分析也同理)
先贴一下仿真参数:
Tpwm = 1e-4;%开关周期
Tspeed = 1e-4;%转速采样周期,在实际DSP系统中,Tspeed会小于Tpwm
Pn = 4;%电机极对数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Rs = 3;%定子电阻
flux = 0.1688;%永磁体磁链
Vdc = 311;%直流母线电压
iqmax = 25;%额定电流
fc = 300;%电流环带宽
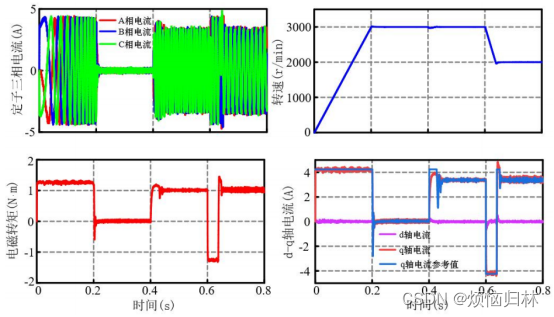
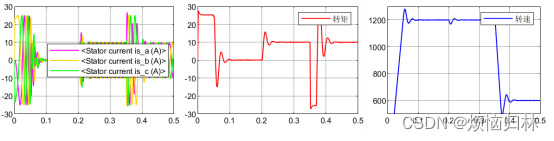
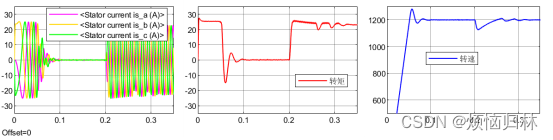
在我之前的所有文章中,转速环都是采用PI控制的。不知道你们有没有注意到,我这个转速超调量有点大。(转速环P=0.25,I=50)启动给定转速1200r/min,0.2s加10Nm负载,0.35s给定转速600r/min。
在加速到1200r/min的时候,最大转速都快达到1300r/min了;降速到600r/min的时候,最低转速到达了500r/min,感觉超调量是有一些大了。
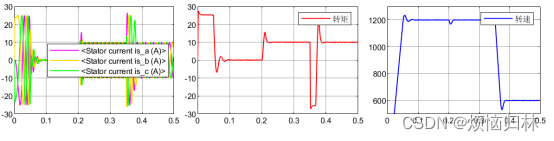
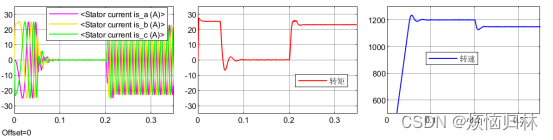
一开始我还以为是调的的PI的参数问题(我的电流环都是用带宽配置的,转速环是自己调的),但是我看了我设置的其他电机,转速超调量都很小,基本没有(比如我下面这台电机,变速过程基本都没有转速超调)。
后来我还觉得是我转速环控制频率的问题,看过我往期知乎的朋友,应该都知道我的转速环控制频率设置的比较低,一般设置为2kHz。但是我把转速环控制频率设置为10kHz,转速的超调量还是一样大。说明不是控制频率的问题。
最终原因就在于这个积分器的限幅值,我仿真中都是将转速环积分器的限幅值设置为q轴电流的额定值,iqmax = 25。
之前有个企业的朋友问我,这个转速环的积分器的限幅到底应该为多少?他说设置为q轴电流的额定值时,退饱和的时间还是太长了,不满足他们的需求。
按照陈伯时老师运动控制系统教材中的原话来说,对于这种非增量式的PI调节器而言,“积分器的限幅设置为小于等于额定电流”。(我记得是这样的)
那我们就来看积分器的限幅的改变,对整个系统有什么影响。
单独把转速环积分器输出和转速数值拉出来看看。
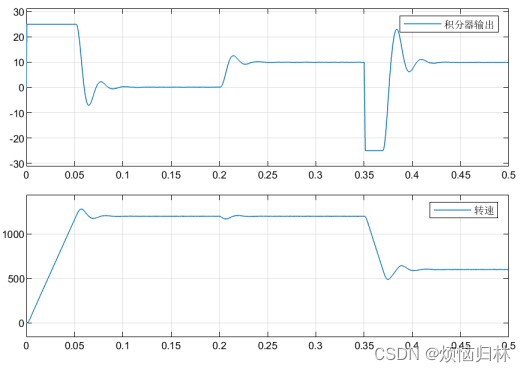
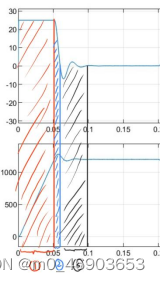
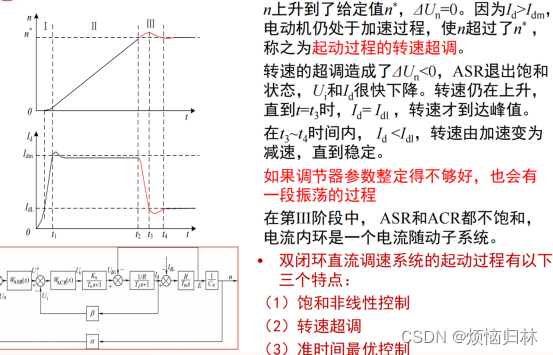
现在我们来单独分析启动过程,我把启动过程分为了三个阶段。
1.红色部分,是加速到1200r/min前的情况,此时积分器保持在限幅值25A。
2.蓝色部分,退饱和阶段。由于我这是空载启动,在0.2s之后才加入负载,在不考虑摩擦转矩的情况下,空载时的稳态电流应该为0。
即转速环比例环节P输出为0,转速环积分环节I输出也为0。而刚进入蓝色部分时,转速环积分环节I输出为25,那怎么才能使转速环积分环节I输出为0呢?
就只能使得转速超过1200r/min,进而使得PI调节器的输入数值error为负数,进而使得转速环积分环节I输出从25减小为0。
3.黑色部分,震荡调节阶段。
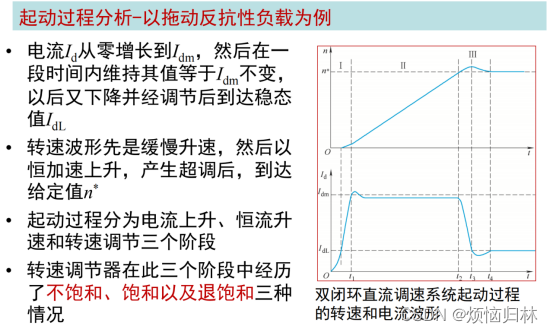
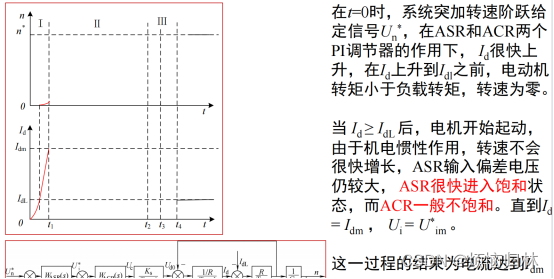
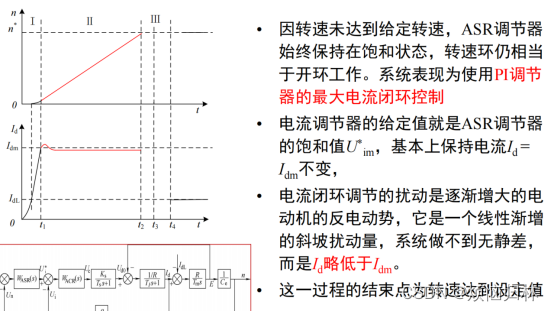
如果我这里分析看不懂的话,也可以参照陈伯时老师运动控制系统教材,我把当时上这门课的PPT中的相应内容贴在这。
1.积分器限幅对启动超调量的影响
从上述分析可以知道,转速的超调就是来自于积分器退饱和。现在我的仿真的积分器输出最大值为25,它降到0需要一段时间,这段时间越长,转速的超调量就越大。
那我现在把积分器输出最大值由25改成10,从10降低到0的时间肯定要比25降低到0的时间短,那么转速超调量肯定就越小了。
再极端点想想,如果把积分器输出最大值改成0,也就是转速环只采用P环节,那就不需要积分退饱和,也就没有超调量了。
那我们来看看仿真结果。
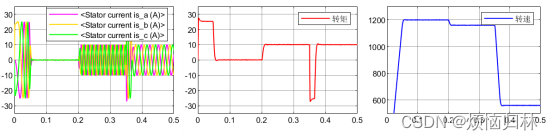
可以看到,积分器输出最大值由25改为10的时候,转速超调量明显减小了。在积分器输出最大值为0时,转速确实没有超调量了,但是在0.2s突加负载之后,由于没有积分环节,转速出现了明显的静差,电机不能达到给定转速。
2.积分器限幅对重载情况下的影响
再仔细想想,如果积分器输出最大值不设置为额定电流,假设积分器输出最大值为额定电流的五分之二。当电机带上额定负载的时候,电机需要输出额定电流,而积分器只能输出五分之二的额定电流。那还剩下五分至三的额定电流由谁来出呢?
剩下五分至三的额定电流只能由转速环的比例环节P进行输出了。但是想想啊,P要有输出的话,说明P需要有一个不为零的输入error。这个error是参考转速与实际转速的差值。既然要求error不为0,那说明实际转速达不到参考转速。
好,按照上述分析,我给电机在0.2s带上重载试试。电机的额定负载为25Nm,我在0.2s时给电机突加23Nm的负载看看情况如何。
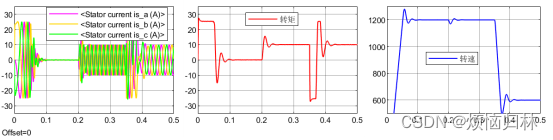
可以看到,当积分器输出最大值不断减小时,电机在动态过程中的超调量也不断减小;但电机在带重载时的转速静态误差也越大了。
那从上述仿真中可以看出:在转速环为PI调节器的情况下,如果希望伺服系统的超调量比较小,我们可以适当的减小转速环积分器的限幅值,但对于经常带重载的电机而言,不能过分的减小转速环积分器的限幅值,否则会使电机出现较大的稳态误差。
3.如何减小PI调节器的超调量?
1)采用增量式的PI控制器
2)将PI控制器改成IP控制器
如下图所示:
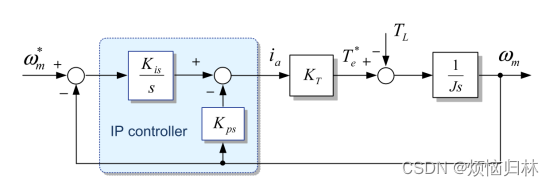

相同带宽下,PI控制器和IP控制器达到给定速度的时间以及抗扰性能一致,但IP没有超调量。
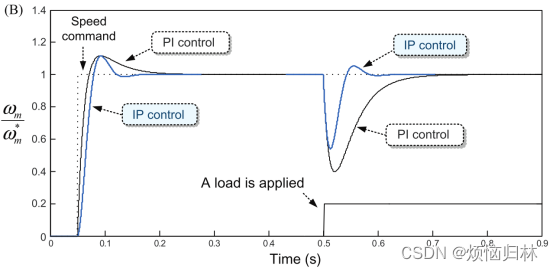
超调量一致,但是IP控制器到达给定转速的时间更短,抗扰性能也更好。
参考:Seung-Ki Sul的电机控制教材。“点赞”and“收藏”文章之后直接私信问我要就好了。
或者直接在IEEE搜“Seung-Ki Sul”,然后选择“Books”即可。虽然IEEE上没有我看的这本教材,但是有他写过的其他的电机控制教材,内容都差不多。我大概看了一眼,IEEE上面可以搜到的这些著作了,写的比我现在看的这本更全面一些(比如说PI调节器的有源阻尼控制、无位置传感器控制、观测器设计等等),相当于我这本的升级版。
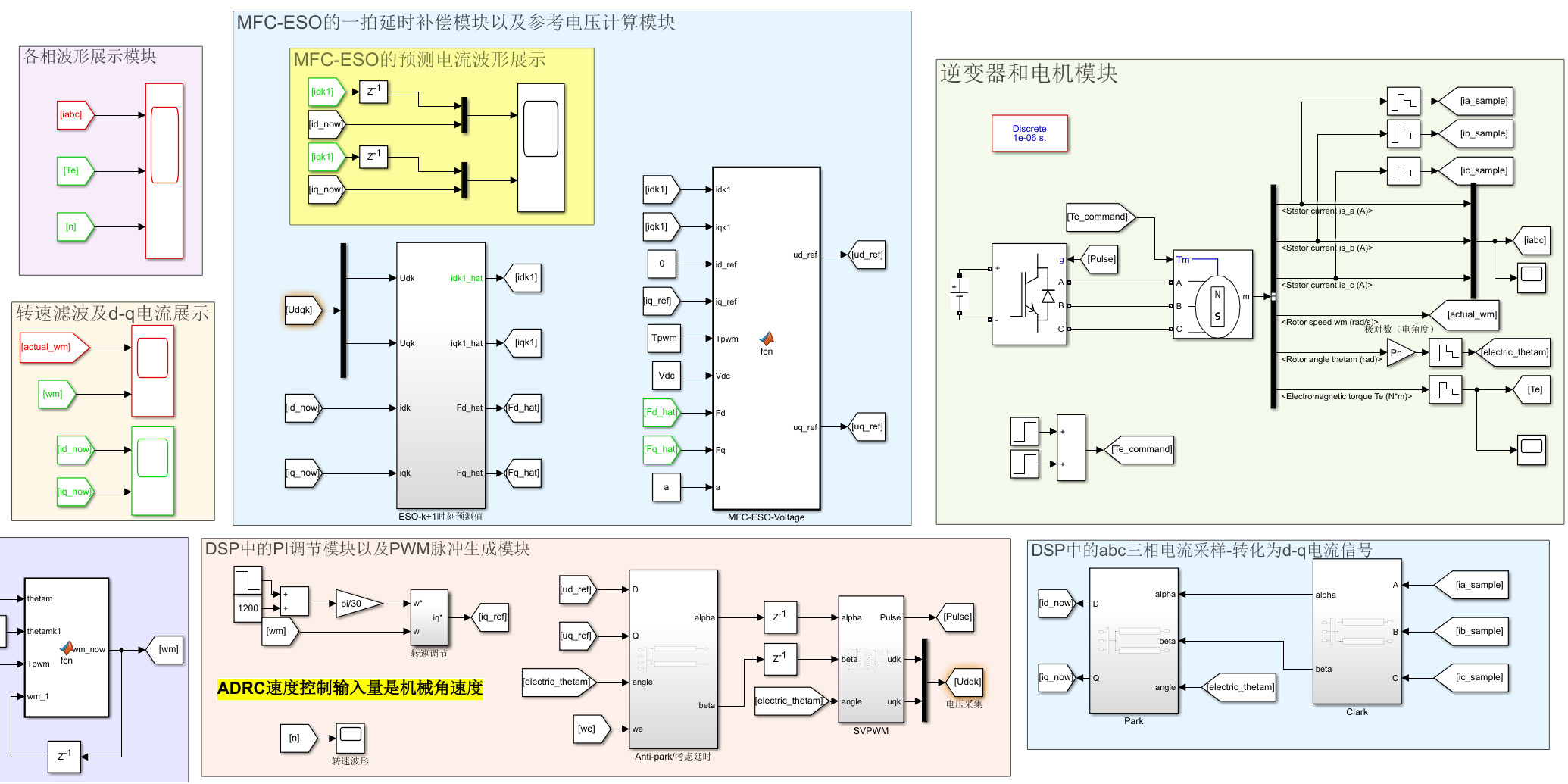
3)自抗扰的转速环
引入自抗扰的转速环(毕竟之前讲了那么多ESO,把ESO学的差不多也够用了,先贴几个仿真图吧,下期再说相应的文献和仿真)
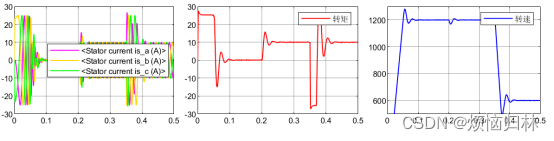
这里贴几张采用线性扩张状态观测器(LESO)的自抗扰转速环的仿真波形(貌似网上目前搜到的帖子都是采用非线性的ESO,我觉得太复杂了,其实没必要,还是采用线性的比较方便)。与转速环采用PI相比,它能够更快的达到给定转速,而且无超调量。


我往期内容已经做了基于ESO的电流环,那我们可以把转速环和电流环都换成ESO的形式。
永磁同步电机高性能控制算法(7)——基于PI调节器控制、无差拍预测电流控制、扩张状态观测器-无差拍预测电流控制、扩张状态观测器-无模型预测控制的仿真对比 - 知乎

从这个波形图可以看到动态过程中的转速/电流超调量也变小了。(就比如在刚启动的时候,我的额定电流对应的转矩是25Nm,而启动转矩略微大于了25Nm,说明电流也有一个超调量,这也正是电流环的积分环节造成的)




腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 22
22 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)