永磁同步电机的高性能控制(3)基于扩展状态观测(ESO)的PMSM无差拍预测电流控制的鲁棒性提升策略——内容详细、附带仿真对比分析
在之前的内容中讲到了永磁同步电机(PMSM)无差拍预测电流控制(DPCC),其特点是无需进行电流环的PI调参,而且具有相同的稳态性能、更快的动态性能。当然,这么完美的控制策略显然是不可能的。无差拍预测电流控制是属于模型预测控制的一种。模型预测控制需要精确的电机参数,当发生参数失配时,DPCC的控制性能就会急剧下降。
在之前的内容中讲到了永磁同步电机(PMSM)无差拍预测电流控制(DPCC),其特点是无需进行电流环的PI调参,而且具有相同的稳态性能、更快的动态性能。
当然,这么完美的控制策略显然是不可能的。无差拍预测电流控制是属于模型预测控制的一种。模型预测控制需要精确的电机参数,当发生参数失配时,DPCC的控制性能就会急剧下降。
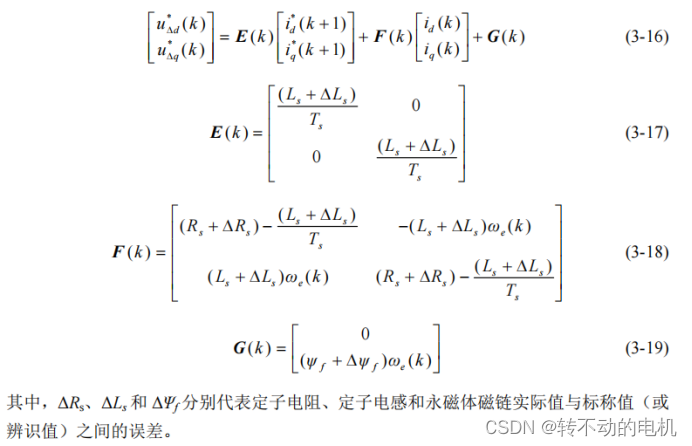
在预测控制中,控制器一般采用的电机铭牌标称参数或者通过辨识算法测量估算的电机参数,则实际无差拍电流预测控制输出方程表示如式(3-16)到式(3-19)所示:
将式(3-16)得到的控制电压带入式(3-3)中,可以得到其电流响应值如式(3-20)所示 :
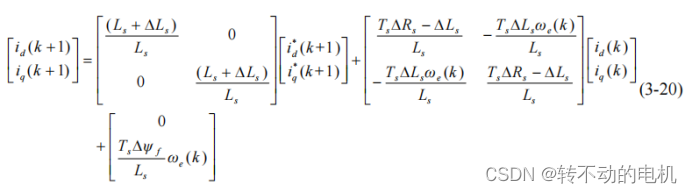
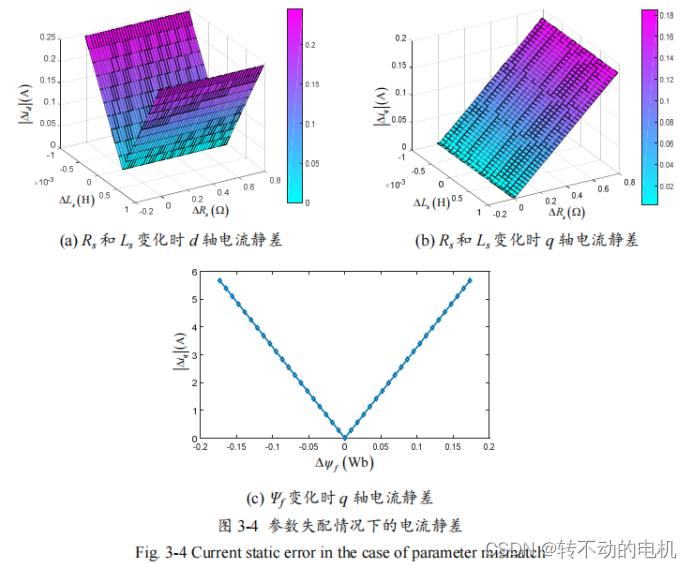
式(3-20)描述了模型参数失配对 DPCC 电流响应关系,分析表明永磁体磁链失配仅 对交轴电流 iq 有影响;然而,定子电阻和电感对直轴电流 id 和交轴电流 iq 都有影响。式 (3-21)为模型参数失配情况下,dq 轴电流响应与给定值之间的误差关系。
此处的参考文献:李林涛. 交流伺服系统无差拍预测电流控制鲁棒性能提升方法[D]. 陕西:西安理工大学电气工程学院,2021.
这样来看,当控制系统出现参数失配的情况,实际电流就会偏离参照电流值,影响电机的控制性能,甚至可能使电机失控。
为提高DPCC 策略的鲁棒性,本文章将引入扩展状态观测器(Extended StateObserver,ESO),以补偿参数失配带来的扰动。相比于其他扰动观测器而言,ESO具备较大的优势,如不依靠于精确的系统模型、对参数变化不敏感、动态响应快等。且ESO的一个很大的优势在于其参数设计简单。通过Matlab/Simulink仿真,验证 ESO在参数失配情况下的补偿作用。
连续扩展状态观测器的设计
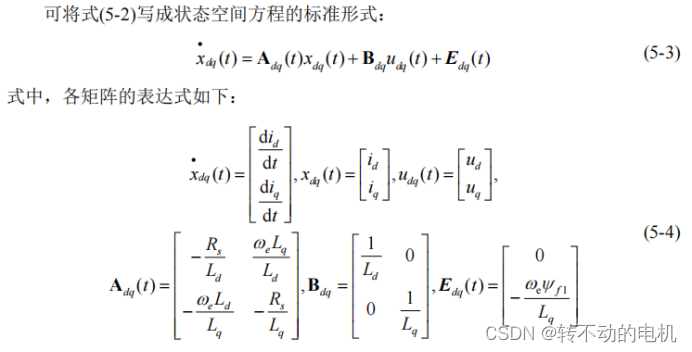
设计观测器需要控制系统的状态空间方程。PMSM 在 同步旋转坐标系下的状态空间方程如下:
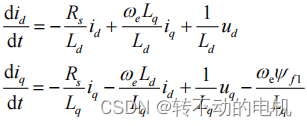
根据上式,可得的 d-q 回路的状态空间方程为:

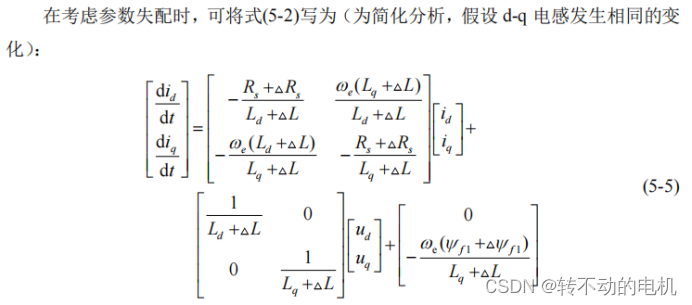
由上式可以看出,当电机发生多参数失配时,电机方程变得极为复杂,想同时观测所有参数变换是十分困难的。
根据扩展状态观测器的思想,可将参数失配的扰动,等效为一个新的输入量,将式(5-5)写成状态空间方程的形式:
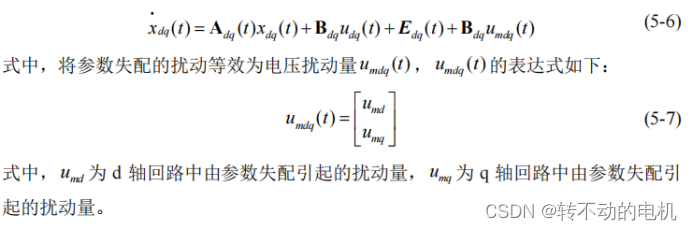
根据 ESO 的思想,已将参数失配的扰动等效为电压扰动量,接下来再根据 ESO的一般形式,列出应用于 d-q 轴回路的 ESO 表达式:
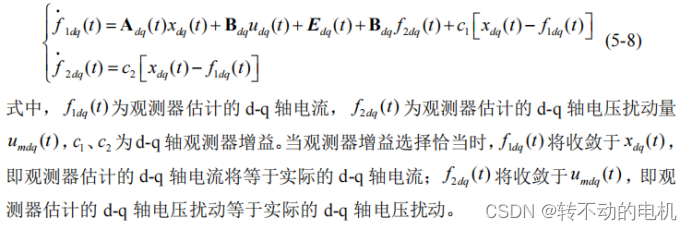
至于观测器为什么这么设计,将在下文配置极点处,进行解释。
从上面也可以看出来,扩展状态观测器(ESO)的思想,把多个未知的参数扰动,等效为一个扰动,只有观测出中一个扰动的大小,就可以补偿到控制器中了。不需要同时观测太多扰动。
离散扩展状态观测器的设计
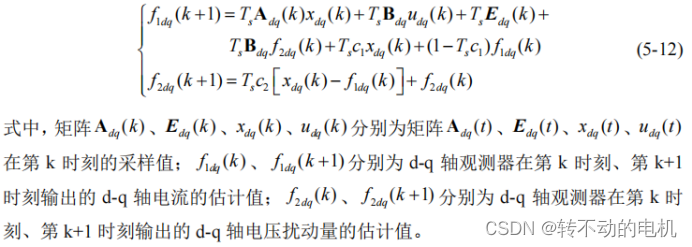
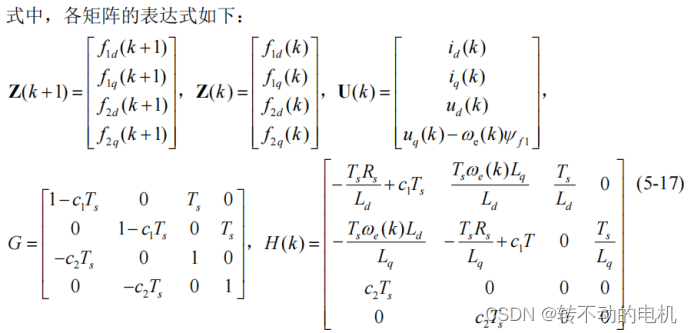
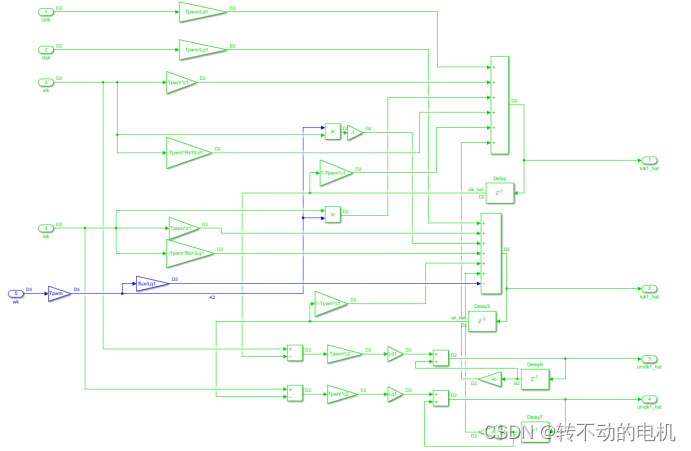
上文已经介绍了在连续时间系统中的 ESO 的设计。但是在实际的电机控制系统中,通常采用数字芯片 DSP,故应对 ESO 进行离散化。先将式(5-8)进行离散化,得到 d-q 轴 ESO 的表达式:
在考虑参数不匹配等效的电压扰动时,第 k+2 时刻的电流预测值表达式如下:


根据无差拍预测电流控制的原理,希望在第 k+2 时刻使得电流达到给定值,故可以计算出电压在第 k+1 时刻的参考值。第 k+1 时刻电压参考值的表达式如下:

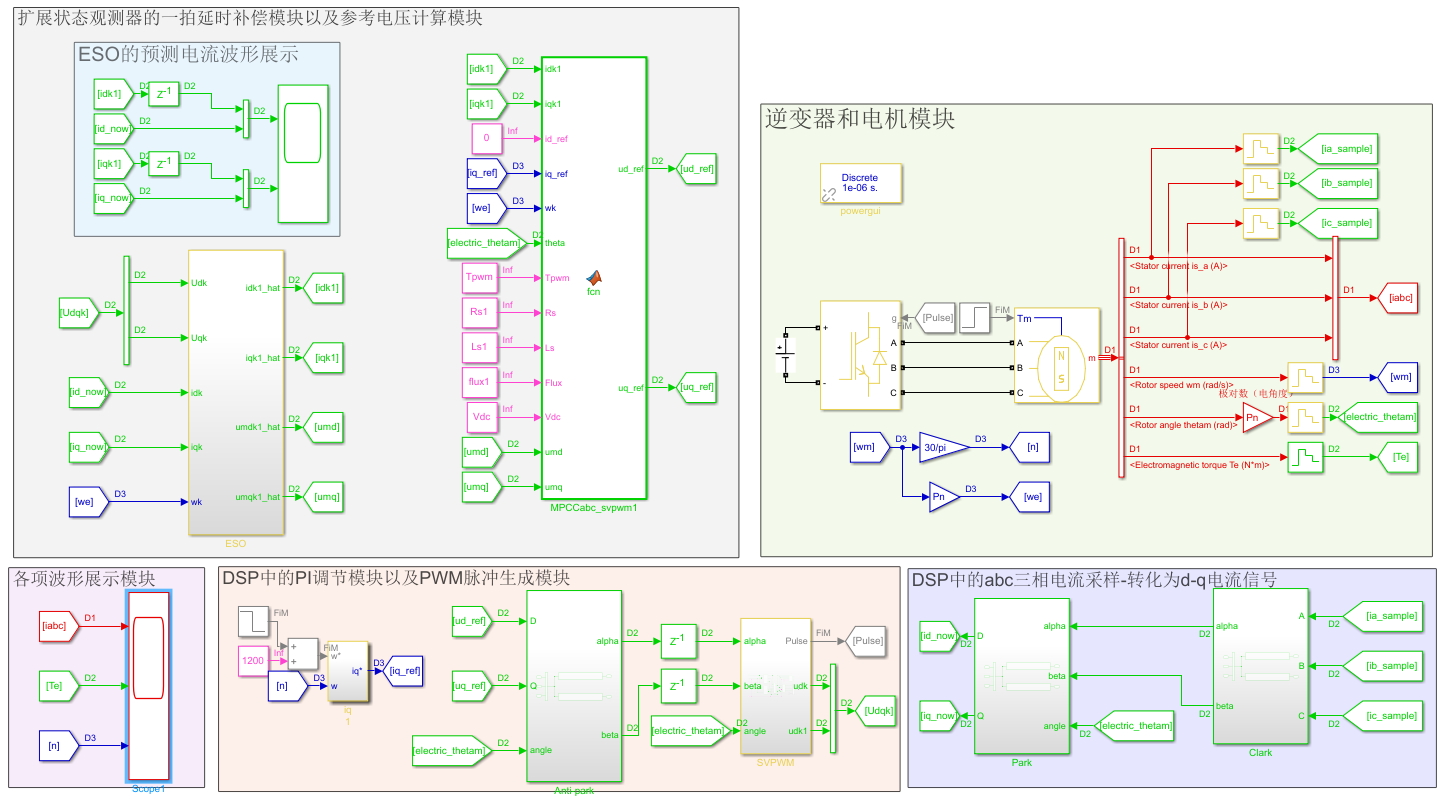
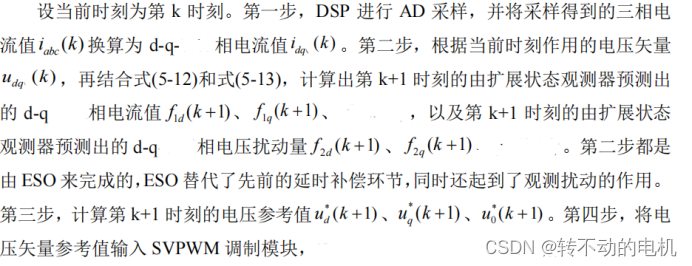
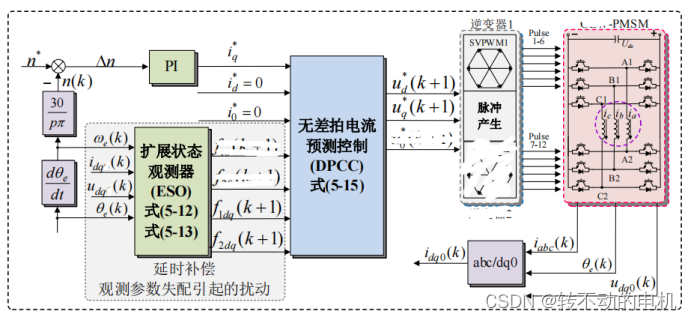
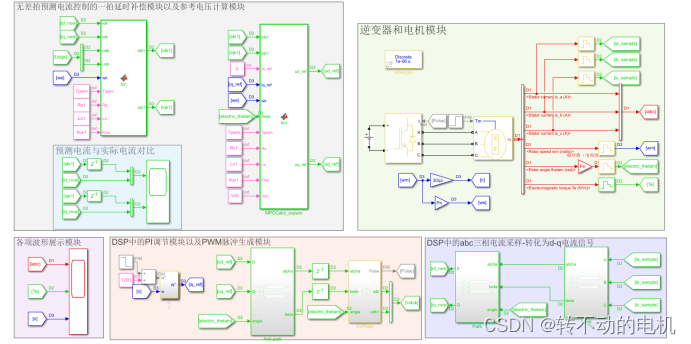
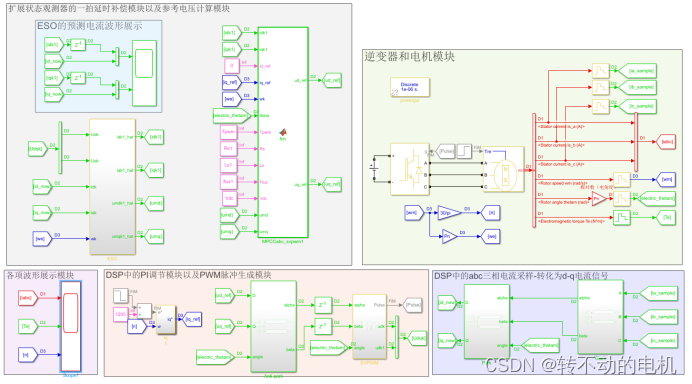
上文已经介绍 ESO 了在 DPCC 的表达式,下面将介绍基于 ESO 的 DPCC策略在实际电机控制系统的实施过程。
因为我之前做的是别的电机,这个控制框图我直接复制过来了,大家凑合着看吧,把后面的电机看成正常的永磁同步电机就行。
扩展状态观测器建立的参考文献(不过他是增量式的,我自己改成了非增量形式):
郎孝宇. 基于增量式模型的 PMSM 鲁棒电流预测控制技术[D]. 黑龙江:哈尔滨工业大学电气工程及自动化学院,2017.
扩展状态观测器的稳定性分析及增益选择
下文将先以 d-q 轴扩展状态观测器为例,分析 ESO 的稳定性,接着进行 ESO 的增益选择。

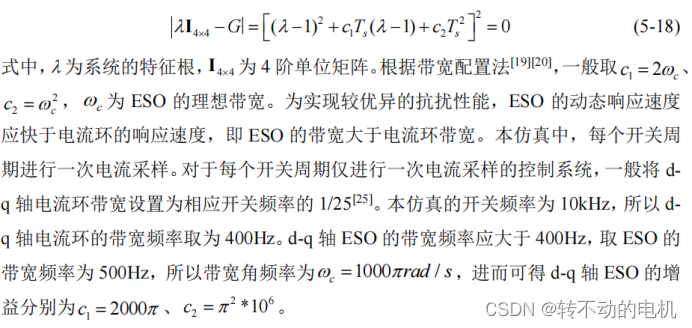
根据离散状态空间方程的定义,离散状态空间方程的特征方程只与矩阵 G 有关,因此可得到所设计的 d-q 轴离散扩展观测器的特征方程:
稳定性分析这个地方的参考文献是(为什么不用上文那篇哈工大的稳定性分析,因为我之前推导过一次,我记得他有的地方好像错了/或者也可能是他有什么附加条件却没说清楚):
王安鹏. 永磁直线同步电机高性能电流控制及扰动抑制策略研究[D]. 江苏:南京航空航天大学自动化学院,2021.
ESO的带宽配置法的参考文献:
[19]Gao Z . Scaling and bandwidth-parameterization based controller tuning[C]. Proceedings of the 2003 American Control Conference, 2003, 4989-4996.
[20] Liu H , Li S . Speed Control for PMSM Servo System Using Predictive Functional Control and Extended State Observer[J]. IEEE Transactions on Industrial Electronics, 2012,59(2):1171-1183
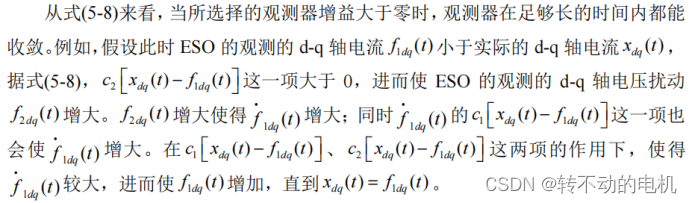
接下来解释为什么ESO的状态观测器要设计成(5-8)的形式,以下是个人拙见:
仿真展示:
电机的仿真参数:
Tpwm = 1e-4;%开关周期
Tspeed = 5e-4;%转速采样周期,在实际DSP系统中,Tspeed会小于Tpwm
Pn = 4;%电机极对数
Vdc = 311;%直流母线电压
iqmax = 30;%额定电流
%这是电机实际参数
Ls = 8.5e-3;%定子电感,采用隐极的,Ld=Lq=Ls
Rs = 3;%定子电阻
flux = 0.1688;%永磁体磁链
%扩展观测器极点参数配置
c1 = 2*(500*2*pi);
c2 = (500*2*pi)^2;
%这是DSP内部的控制器参数
%(即ESO和参考电压计算模块采用的参数)
Ls1 = 4.25e-3;%电感参数设置为实际电感的50%
Ld1 = Ls1;
Lq1 = Ls1;
Rs1 = 6;%电阻参数设置为实际电阻的200%
flux1 = 0.0844;%磁链参数设置为实际磁链的50%
仿真条件:电机空载启动,给定转速为1200r/min;在0.5s时加5N·m负载;在0.35s时,给定转速改为1000r/min。
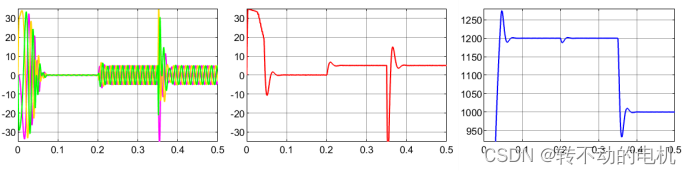
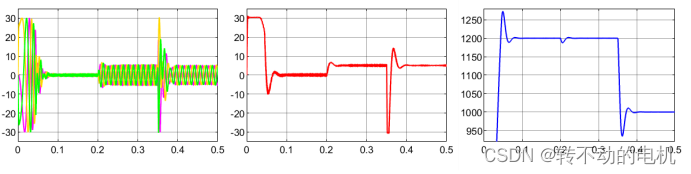
本仿真中设置的最大q轴电流为30A,d轴电流参考值为0,且仿真采用的是等幅值变换。所以启动时的最大三相电流的幅值应该等于最大q轴电流30A。
但是从仿真中可以看到,由于参数失配,传统DPCC的最大电流已经超过了30A,如果长时间以此大电流运行,必然会使电机损坏。
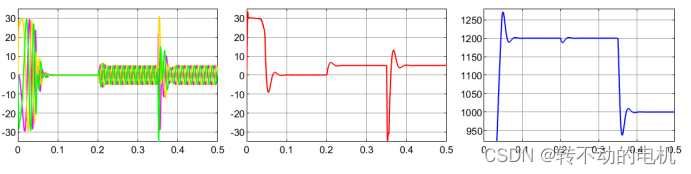
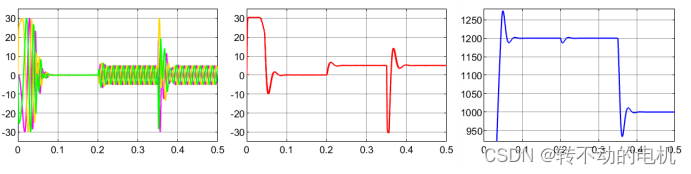
从ESO的无差拍仿真波形来看,定子三相电流被很好的限制在了30A,没有超过这个限制。而且还可以看到,传统无差拍启动过程中的转矩数值,在达到最大值后不断下降;而ESO的无差拍的转矩数值一直保持在稳定的数值,在电机达到给定转速后转矩才开始减小。
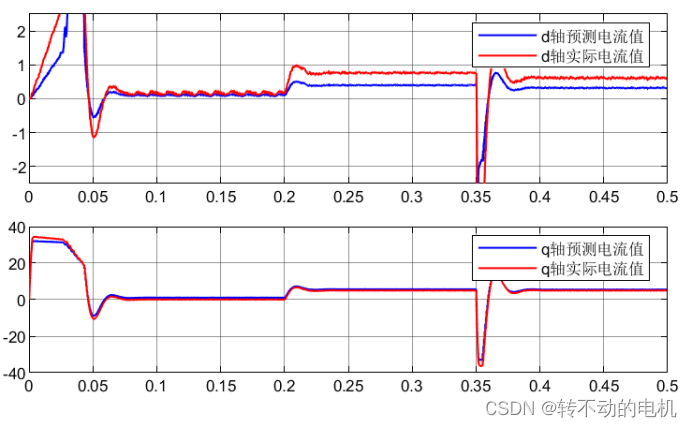
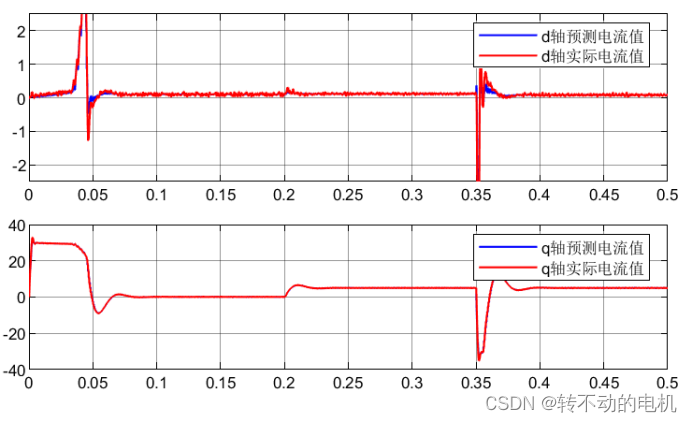
很明显,即使出现参数扰动,ESO仍能够使系统精确的观测实际电流,这也说明了本文所选择的参数的正确性。
接下来我们再改一下参数:
%这是DSP内部的控制器参数
Ls1 = 17e-3;%电感参数设置为实际电感的200%
Ld1 = Ls1;
Lq1 = Ls1;
Rs1 = 3;%电阻参数设置为实际电阻
flux1 = 0.1688;%磁链参数设置为实际磁链
控制器的电感偏大,计算出来的电压矢量会偏大,进而导致电流变化偏大,所以会出现较大的电流脉动。电流脉动增大的话,相电流的THD就会变大,下文我们就分析一下相电流的THD,看看ESO的效果。
在实际电机运行时,由于电流增大会导致磁饱和,进而使得电感减小,即控制器中的电感参数大于实际电感参数,所以这种情况也是比较贴近真实的。
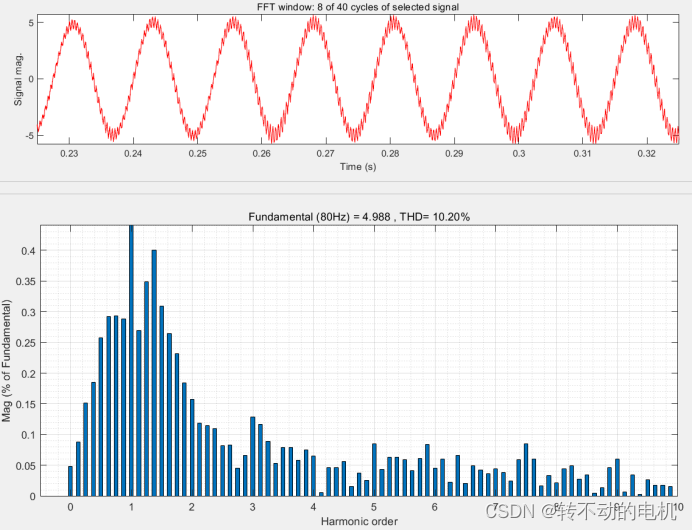
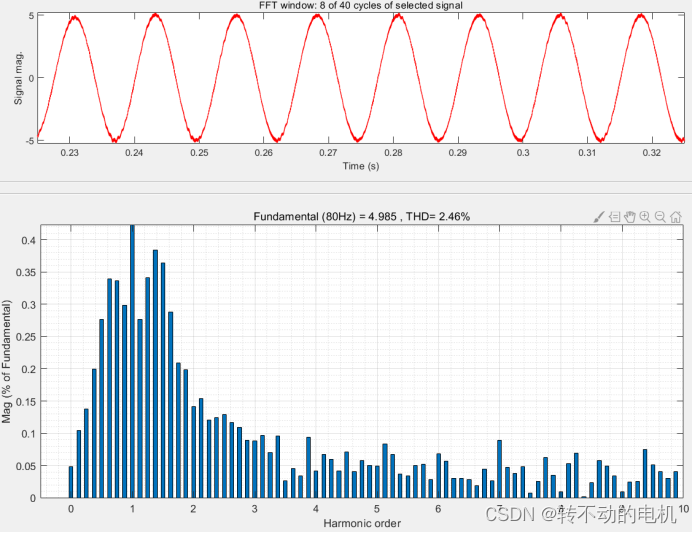
从上面的FFT分析来看,ESO能够很好的抑制电感失配带来的电流脉动。再从上述的仿真波形来看,控制器电感偏大,使得系统电流脉动增大,进而增加转矩脉动,影响电机性能。而采用了扩展状态观测器的无差拍预测电流控制的转矩脉动明显得到了有效抑制。
上述各仿真都验证了本文搭建的仿真模块以及参数选择的正确性。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)