倾斜补偿的电子罗盘(2):磁传感器的误差来源、硬磁干扰的校准(3个参数)、实验验证
电子罗盘(2):磁传感器的误差来源、硬磁干扰的校准(3个参数)、实验验证文章目录理想情况误差来源内部外部误差模型硬磁干扰的校准(3个参数)使用的模型最小二乘法实测结果总结代码和资料MATLAB代码参考资料样机理想情况理想情况下,磁传感器的测量结果是完全准确的,随着磁传感器的不同位置,三轴的读数为地磁场强度在三轴的投影:h=[hxhyhz]hx2+hy2+hz2=B2\textbf{h}=\left
电子罗盘(2):磁传感器的误差来源、硬磁干扰的校准(3个参数)、实验验证
理想情况
理想情况下,磁传感器的测量结果是完全准确的,随着磁传感器的不同位置,三轴的读数为地磁场强度在三轴的投影:
h
=
[
h
x
h
y
h
z
]
h
x
2
+
h
y
2
+
h
z
2
=
B
2
\textbf{h}=\left[ \begin{matrix} h_x\\ h_y \\ h_z \end{matrix} \right] \\ h_x^2 + h_y^2 + h_z^2 = B^2
h=⎣⎡hxhyhz⎦⎤hx2+hy2+hz2=B2
因此,磁传感器在不同角度的测量值,落在一个球面
x
2
+
y
2
+
z
2
=
B
2
x^2+y^2+z^2=B^2
x2+y2+z2=B2上,球心是原点,半径是B。
误差来源
主要分为磁传感器内部和外部因素造成的误差。
内部
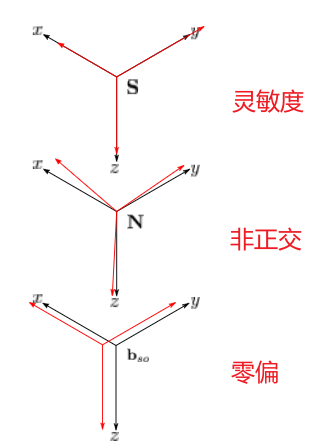
主要是磁传感器灵敏度
-
三轴灵敏度不同,
例如,10uT的磁感应强度,分别用三个轴来测量,测量结果为:9uT,10uT,11uT。
-
三轴不正交
例如,某个磁场下,理想的读数是:[10uT,0,0],但实际上是[10uT,1uT,0],因为XY两轴不是完全正交,原来只在X轴有读数,在非理想情况下,Y轴上也有了一定读数。
-
零偏
在完全无磁场时也有一个非零读数。
几种误差对读数的影响示意图如下:(来自文末参考资料)
外部
-
硬磁干扰
硬磁干扰由传感器附近的永磁体等的磁场引起,造成的影响类似于零偏。
-
软磁干扰
软磁干扰是传感器附近的铁磁材料改变了原磁场的强度和方向。
详见磁传感器PCB设计指导 Layout Recommendations for PCBs Using a Magnetometer Sensor (nxp.com.cn)
误差模型
假设理想的测量结果为:
h
0
=
[
h
0
x
h
0
y
h
0
z
]
\mathbf{h_0}=\left[ \begin{matrix} h_{0x}\\ h_{0y} \\ h_{0z} \end{matrix} \right]
h0=⎣⎡h0xh0yh0z⎦⎤
首先,外部的磁场由于软磁和硬磁干扰而发生了改变,先考虑外部的干扰:
h
m
=
I
3
×
3
h
0
+
F
h
i
\mathbf{h_m}=\mathbf{I_{3\times3}} \mathbf{h_0} + \mathbf{F_hi}
hm=I3×3h0+Fhi
I是3x3矩阵,用于表示软磁干扰,
F
s
i
\mathbf{F_si}
Fsi为硬磁干扰造成的偏置。
考虑内部误差后,测量结果变为:
h
=
S
3
×
3
N
3
×
3
h
m
+
F
o
s
=
S
3
×
3
N
3
×
3
(
I
3
×
3
h
0
+
F
h
i
)
+
F
o
s
\mathbf{h} = \mathbf{S_{3\times3}} \mathbf{N_{3\times3}}\mathbf{h_m}+\mathbf{F_{os}}= \mathbf{S_{3\times3}} \mathbf{N_{3\times3}}(\mathbf{I_{3\times3}} \mathbf{h_0} + \mathbf{F_hi})+\mathbf{F_{os}}
h=S3×3N3×3hm+Fos=S3×3N3×3(I3×3h0+Fhi)+Fos
其中,S、N为3x3矩阵,S表示三轴灵敏度差异,N表示三轴非正交的影响。 F o s \mathbf{F_{os}} Fos为3x1向量,表示零偏。
化简后,测量值h与实际值h0之间的关系可以表示为:
h
=
W
h
0
+
V
h
0
=
W
−
1
(
h
−
V
)
\mathbf{h} = \mathbf{W} \mathbf{h_0} + \mathbf{V} \\ \mathbf{h_0} = \mathbf{W^{-1}}(\mathbf{h}-\mathbf{V} )
h=Wh0+Vh0=W−1(h−V)
W是3x3矩阵,V是3x1向量。其中,W是一个对称矩阵(具体),因此只含6个系数。加上V的3个系数,总共需要获得9个系数才能实现校准。
但是,在某些场合只有硬磁干扰,而软磁干扰不明显,则此时 W = E \mathbf{W}=\mathbf{E} W=E, h = h 0 + V \mathbf{h} = \mathbf{h_0} + \mathbf{V} h=h0+V就只需要获得V的3个系数。
硬磁干扰的校准(3个参数)
使用的模型
如果只有硬磁干扰,则理论测量结果h0可表示为:
h
0
=
W
−
1
(
h
−
V
)
=
h
−
V
\mathbf{h_0} = \mathbf{W^{-1}}(\mathbf{h}-\mathbf{V} )=\mathbf{h}-\mathbf{V}
h0=W−1(h−V)=h−V
理论测量结果落在球面上:
h
0
T
h
0
=
(
h
−
V
)
T
(
h
−
V
)
=
B
2
\mathbf{h_0^T}\mathbf{h_0} = (\mathbf{h}-\mathbf{V})^T(\mathbf{h}-\mathbf{V})=B^2
h0Th0=(h−V)T(h−V)=B2
其中,
h
=
[
h
x
h
y
h
z
]
,
V
=
[
V
x
V
y
V
z
]
\textbf{h}=\left[ \begin{matrix} h_x\\ h_y \\ h_z \end{matrix} \right], \textbf{V}=\left[ \begin{matrix} V_x\\ V_y \\ V_z \end{matrix} \right]
h=⎣⎡hxhyhz⎦⎤,V=⎣⎡VxVyVz⎦⎤
展开后:
h
x
2
+
h
y
2
+
h
z
2
−
2
V
x
h
x
−
2
V
y
h
y
−
2
V
y
h
y
+
V
x
2
+
V
y
2
+
V
z
2
−
B
2
=
0
h_x^2+h_y^2+h_z^2- 2V_xh_x- 2V_yh_y- 2V_yh_y + V_x^2 +V_y^2 +V_z^2 -B^2 = 0
hx2+hy2+hz2−2Vxhx−2Vyhy−2Vyhy+Vx2+Vy2+Vz2−B2=0
整理下:
[
h
x
2
+
h
y
2
+
h
z
2
]
−
[
h
x
h
y
h
z
1
]
[
2
V
x
2
V
y
2
V
z
B
2
−
(
V
x
2
+
V
y
2
+
V
z
2
)
]
=
0
[h_x^2+h_y^2+h_z^2]- \left[ \begin{matrix} h_x & h_y & h_z & 1 \end{matrix} \right] \left[ \begin{matrix} 2V_x\\ 2V_y\\ 2V_z \\ B^2 - (V_x^2 +V_y^2 +V_z^2) \end{matrix} \right] = 0
[hx2+hy2+hz2]−[hxhyhz1]⎣⎢⎢⎡2Vx2Vy2VzB2−(Vx2+Vy2+Vz2)⎦⎥⎥⎤=0
最小二乘法
获得多组测量数据h(1),h(2)… h(m),并整理:
[
h
x
2
[
1
]
+
h
y
2
[
1
]
+
h
z
2
[
1
]
h
x
2
[
2
]
+
h
y
2
[
2
]
+
h
z
2
[
2
]
.
.
.
h
x
2
[
m
]
+
h
y
2
[
m
]
+
h
z
2
[
m
]
]
−
[
h
x
[
1
]
h
y
[
1
]
h
z
[
1
]
1
h
x
[
2
]
h
y
[
2
]
h
z
[
2
]
1
.
.
.
.
.
.
.
.
.
.
.
.
h
x
[
m
]
h
y
[
m
]
h
z
[
m
]
1
]
[
2
V
x
2
V
y
2
V
z
B
2
−
(
V
x
2
+
V
y
2
+
V
z
2
)
]
=
[
ϵ
[
1
]
ϵ
[
2
]
.
.
.
ϵ
[
m
]
]
\left[ \begin{matrix} h_x^2[1]+h_y^2[1]+h_z^2[1]\\ h_x^2[2]+h_y^2[2]+h_z^2[2] \\ ... \\ h_x^2[m]+h_y^2[m]+h_z^2[m] \end{matrix} \right] -\left[ \begin{matrix} h_x[1] & h_y[1] & h_z[1] & 1\\ h_x[2] & h_y[2] & h_z[2] & 1\\ ... & ...& ... & ...\\ h_x[m] & h_y[m] & h_z[m] & 1 \end{matrix} \right] \left[ \begin{matrix} 2V_x\\ 2V_y\\ 2V_z \\ B^2 - (V_x^2 +V_y^2 +V_z^2) \end{matrix} \right] = \left[ \begin{matrix} \epsilon[1]\\ \epsilon[2] \\ ... \\ \epsilon[m] \end{matrix} \right]
⎣⎢⎢⎡hx2[1]+hy2[1]+hz2[1]hx2[2]+hy2[2]+hz2[2]...hx2[m]+hy2[m]+hz2[m]⎦⎥⎥⎤−⎣⎢⎢⎡hx[1]hx[2]...hx[m]hy[1]hy[2]...hy[m]hz[1]hz[2]...hz[m]11...1⎦⎥⎥⎤⎣⎢⎢⎡2Vx2Vy2VzB2−(Vx2+Vy2+Vz2)⎦⎥⎥⎤=⎣⎢⎢⎡ϵ[1]ϵ[2]...ϵ[m]⎦⎥⎥⎤
用符号表示:
Y
−
X
β
=
ϵ
\mathbf{Y} - \textbf{X} \mathbf{\beta}=\mathbf{\epsilon}
Y−Xβ=ϵ
根据使用的模型,需要求一组系数
β
\beta
β,使得:
m
i
n
(
ϵ
T
ϵ
)
=
(
Y
−
X
β
)
T
(
Y
−
X
β
)
min(\mathbf{\epsilon^T}\mathbf{\epsilon})=(\mathbf{Y} - \mathbf{X} \mathbf{\beta})^T(\mathbf{Y} - \mathbf{X} \mathbf{\beta})
min(ϵTϵ)=(Y−Xβ)T(Y−Xβ)
根据最小二乘法,
β
=
(
X
T
X
)
−
1
X
T
Y
=
[
2
V
x
2
V
y
2
V
z
B
2
−
(
V
x
2
+
V
y
2
+
V
z
2
)
]
\beta = \left( \mathbf{X}^TX\right)^{-1}\mathbf{X}^T\mathbf{Y}= \left[ \begin{matrix} 2V_x\\ 2V_y\\ 2V_z \\ B^2 - (V_x^2 +V_y^2 +V_z^2) \end{matrix} \right]
β=(XTX)−1XTY=⎣⎢⎢⎡2Vx2Vy2VzB2−(Vx2+Vy2+Vz2)⎦⎥⎥⎤
根据
β
\beta
β,可以方便地求出偏置V和磁感应强度的估计值。
V
x
=
β
[
1
]
2
V
y
=
β
[
2
]
2
V
z
=
β
[
3
]
2
B
e
s
t
i
m
a
t
e
=
β
[
4
]
2
+
V
x
2
+
V
y
2
+
V
z
2
V_x=\frac{\beta[1]}{2} \\ V_y=\frac{\beta[2]}{2} \\ V_z=\frac{\beta[3]}{2} \\ B_{estimate}=\sqrt{\beta[4]^2+V_x^2+V_y^2+V_z^2}
Vx=2β[1]Vy=2β[2]Vz=2β[3]Bestimate=β[4]2+Vx2+Vy2+Vz2
实测结果
用手头的一个磁传感器,采集了传感器朝向各个位置时的约600组数据。做了下简单验证。
最小二乘法的计算结果为:
β
=
[
51.78
−
122.84
16.33
−
3305.63
]
\beta= \left[ \begin{matrix} 51.78\\ -122.84 \\ 16.33 \\ -3305.63 \end{matrix} \right]
β=⎣⎢⎢⎡51.78−122.8416.33−3305.63⎦⎥⎥⎤
转换为零偏和磁感应强度B:
V
x
=
25.89
,
V
y
=
−
61.42
,
V
z
=
8.17
B
e
s
t
i
m
a
t
e
=
34.70
μ
T
V_x =25.89, V_y=-61.42, V_z=8.17 \\ B_{estimate} = 34.70 \mu T
Vx=25.89,Vy=−61.42,Vz=8.17Bestimate=34.70μT
说明传感器样机受到一定的硬磁干扰,XYZ三轴都有一定的。其中Y轴最严重。
实际当地的磁感应强度是49uT左右,但是因为电子罗盘应用中,最后是通过计算tan(-y/x)获得角度,所以只需要相对大小,而不怎么关注数据的绝对大小。
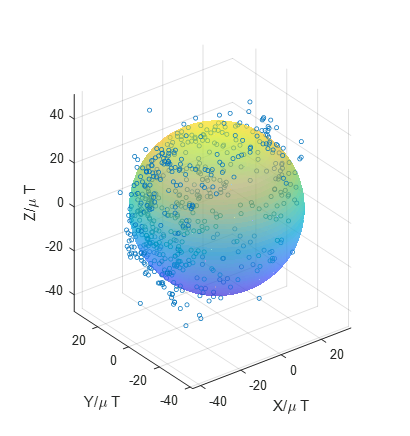
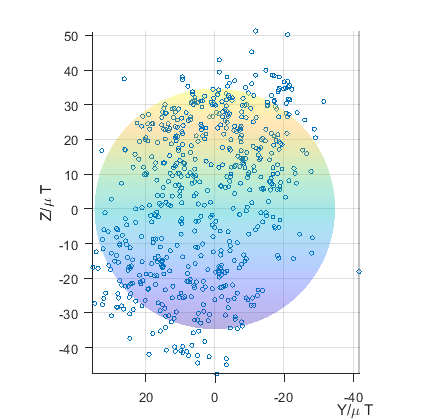
把校准后的数据和拟合结果画在同一个图上:
从XY两轴看,数据点基本上都在拟合的圆内。偏置基本被消除。
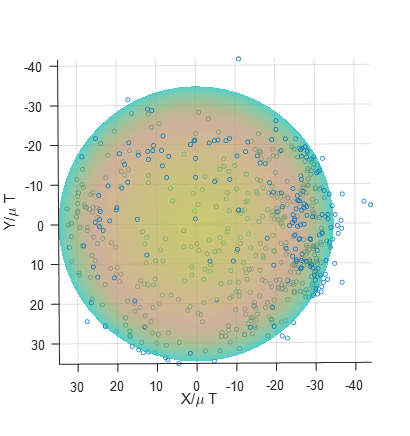
从YZ两轴看,偏置基本被消除,但是数据点有不少在圆外,说明可能还有一些软磁干扰。
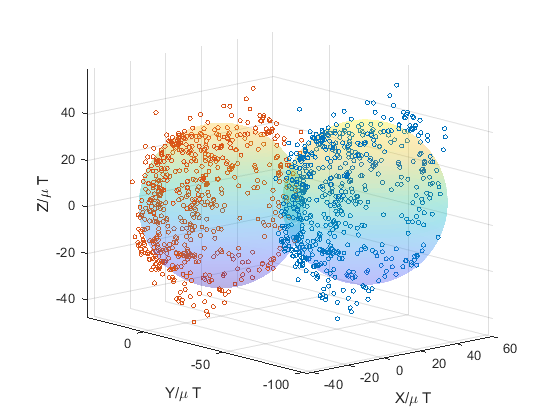
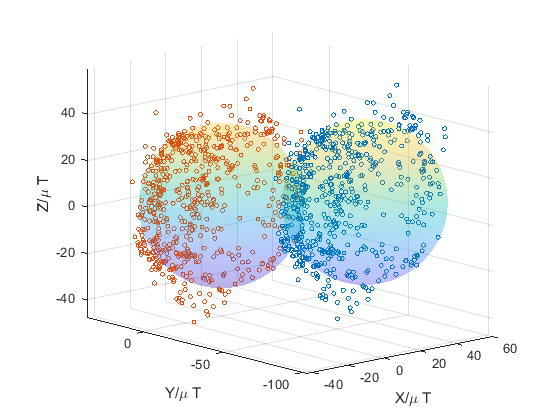
对比校准前后的数据,红色为校准后,蓝色为校准前。可以看到原数据基本在一个球面上,球心距离原点较远。而校准后的数据,球心在原点,说明零偏基本上被消除了。
总结
- 磁传感器的误差来源:传感器内部的零偏、灵敏度、正交;外界环境的硬磁和软磁干扰
- 只存在硬磁干扰的情况下,可以方便地使用最小二乘法进行校准,这时只需要校准3个参数
- 用实验数据进行了验证
代码和资料
MATLAB代码
load('ramdom0502_2.mat') % 包含mag_x,mag_y,mag_z 3个列向量,都是598*1
close all
% 原始数据
scatter3(mag_x,mag_y,mag_z,10)
hold on
Y = mag_x.^2 + mag_y.^2 + mag_z.^2;
ones_vector = ones(length(mag_x),1);
X = [mag_x,mag_y,mag_z,ones_vector];
beta = inv(X'*X) * X' * Y; % 最小二乘法
% 把beta的4个值转换成零偏和B
offset_x = 0.5 * beta(1);
offset_y = 0.5 * beta(2);
offset_z = 0.5 * beta(3);
B_est = sqrt(beta(4) + offset_x^2 + offset_y^2 + offset_z^2);
% 减去零偏后的数据
scatter3(mag_x-offset_x,mag_y-offset_y,mag_z-offset_z,10) % 设置每个点大小为10
xlabel('X/\mu T')
ylabel('Y/\mu T')
zlabel('Z/\mu T')
hold on
% 画球面
[u,v,w] = sphere(56);
K = B_est;
% 校准后的球面
shape1 = surf(K*u,K*v,K*w);
set(shape1, 'FaceAlpha', 0.2)
shading flat
axis equal % 设置坐标轴单位长度相等,看起来更接近球形
% 原始数据的球面
shape2 = surf(K*u+offset_x,K*v+offset_y,K*w+offset_z);
set(shape2, 'FaceAlpha', 0.2)
shading flat
axis equal
参考资料
NXP的应用手册 AN4246,4参数校准 https://www.nxp.com.cn/docs/en/application-note/AN4246.pdf
磁传感器PCB设计指导 Layout Recommendations for PCBs Using a Magnetometer Sensor (nxp.com.cn)
Teslabs Engineering - A way to calibrate a magnetometer
样机
实验数据用很久以前买的开发板+传感器采集,用面包板+跳线连了下电源和I2C。
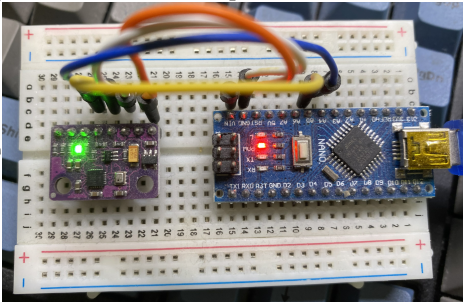
串口工具:MobaXterm
传感器:九轴传感器MPU9250+气压计BMP280,淘宝买的
MCU:Nano V3.0开发板, Atmega328P,也是淘宝买的
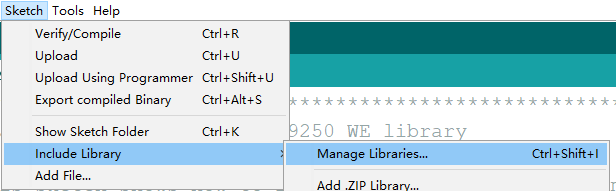
驱动:不用自己写驱动,在Arduino中搜一下现成的,我用的是MPU9250_WE。

基于例程简单修改下就行,正确配置传感器,NANO负责读取和从串口发送测量数据,数据都是在MATLAB中离线处理的。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 19
19 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)