无人机加速器模块技术解析
无人机加速器模块的技术核心在于多源数据融合、实时滤波与高鲁棒性控制,其难点集中于小型化、抗干扰和精度维持。未来将更依赖边缘AI算力和新型通信技术,以实现全自主集群协作与极端环境作业。表:无人机加速器模块性能对比。
一、加速器模块的运行方式
1. 传感器数据采集与融合
加速度计核心作用:测量三维线性加速度(X/Y/Z轴),结合陀螺仪(角速度)和磁力计(方向)构成九轴姿态传感器,实时输出无人机运动状态。
数据融合流程:通过扩展卡尔曼滤波(EKF)或互补滤波,将多传感器数据融合为姿态角,为控制系统提供稳定输入。
2. 控制指令生成与动力响应
飞控算法处理:加速器数据输入飞控单元,结合目标轨迹生成电机调速指令。例如,前向加速需增加前部电机转速并降低后部转速。
动力系统响应:电调(ESC)将指令转换为电机电流,驱动无刷电机调整推力。六推无人机通过多旋翼差动实现复杂机动。
3. 环境交互与自适应调整
实时避障与路径规划:高端无人机通过视觉惯性里程计(VIO)和SLAM算法,结合加速度数据动态调整路径。例如,检测到侧向加速度突变时触发避障策略。
量子通信中继场景:无人机搭载光学中继器时,加速度数据用于稳定光束跟踪系统,确保量子纠缠光子分发精度。
二、核心技术要点
1.多传感器融合与滤波优化
卡尔曼滤波应用:针对加速度计噪声,采用递归预测-校正机制:
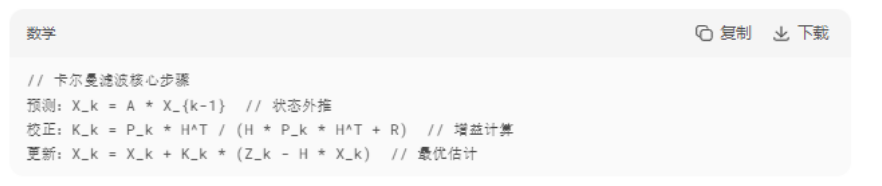
此方法将位移积分误差降低50%以上。
自适应滤波增强:结合IMU温度漂移模型,动态调整协方差矩阵,提升高温/高振环境下的精度。
2. 边缘计算与实时处理
高性能嵌入式平台:如NVIDIA Jetson Orin NX或Jetson Nano,支持实时运行深度学习模型,处理延时<10ms。
轻量化设计:AAEON BOXER-8224AI模块通过晶圆级连接器集成双MIPI CSI摄像头,实现毫米级波前整形。
3. 通信与抗干扰技术
量子链路抗电磁干扰:无人机搭载光学中继节点,通过APT系统维持强电磁环境下的通信稳定性。
4G图传冗余设计:DJI Matrice系列采用LTE网卡套件,在GPS失效时通过蜂窝网络回传加速度数据。
三、技术难点与挑战
1. 小型化与功耗平衡
载荷限制:量子中继无人机需在11.8kg载荷内集成单光子发射器、APT系统及冷却模块,光学器件尺寸需压缩至厘米级。
功耗优化:Jetson Orin模块通过动态电压频率调整将功耗控制在15W内,但高算力任务仍限制续航至40分钟。
2. 抗干扰与环境适应性
复杂电磁环境:太阳辐射干扰下,常规电磁通信失效,需依赖量子通信或声学定位(水下无人机)。
多物理场耦合:高温导致传感器漂移,如环日加速器模块需自转散热,而无人机需主动冷却系统保护电子器件。
3. 实时性与精度矛盾
积分累计误差:加速度二次积分产生的位移误差随时间指数增长,水下无人机定位偏差可达米级/小时。
高动态响应延迟:急加速时电机响应滞后(>50ms)可能导致姿态失控,需预测控制算法补偿。
四、前沿发展趋势
量子通信集成:南京大学团队实现无人机中继的纠缠光子分发,未来或用于构建空基量子网络。
智能自适应感知:中科院西安光机所提出“空谱自适应泛化”模型,结合多矩形嵌套飞行方案,将地物分类精度提升至97.23%。
算力-感知一体化:SU17-Orin选配包支持FAST-LIVO2激光雷达-视觉紧耦合SLAM,实现复杂环境厘米级建图。
总结
无人机加速器模块的技术核心在于多源数据融合、实时滤波与高鲁棒性控制,其难点集中于小型化、抗干扰和精度维持。未来将更依赖边缘AI算力和新型通信技术,以实现全自主集群协作与极端环境作业。
表:无人机加速器模块性能对比



腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)