具身智能中的传感器技术11——IMU技术1
IMU是人形机器人维持平衡的"绝对基准",其核心作用包括提供姿态基准、质心状态估计和高频扰动抑制。机器人需要战术级IMU,具备高稳定性、千赫兹级更新频率和抗振动干扰能力。IMU通常安装在骨盆/躯干位置,并与其他传感器融合使用VRU、LIPM等算法。作为"隐形的王者",高精度IMU是机器人实现复杂动作的关键,在毫秒级与重力博弈中发挥着不可替代的作用。
IMU是人形机器人维持平衡的"绝对基准",其核心作用包括提供姿态基准、质心状态估计和高频扰动抑制。机器人需要战术级IMU,具备高稳定性、千赫兹级更新频率和抗振动干扰能力。IMU通常安装在骨盆/躯干位置,并与其他传感器融合使用VRU、LIPM等算法。作为"隐形的王者",高精度IMU是机器人实现复杂动作的关键,在毫秒级与重力博弈中发挥着不可替代的作用。
在具身智能(尤其是人形机器人)中,IMU(惯性测量单元) 的地位可以概括为:“生与死”的界限。
如果说在自动驾驶汽车上,IMU 只是 GNSS 信号丢失时的“备胎”;那么在人形机器人上,IMU 就是每时每刻维持其直立行走的**“绝对基准”**。没有 IMU,人形机器人甚至无法站立 1 秒钟。
以下从核心作用、关键性能指标、安装布局、融合算法四个维度深度解析。
1. 核心作用:为什么它是“前庭系统”?
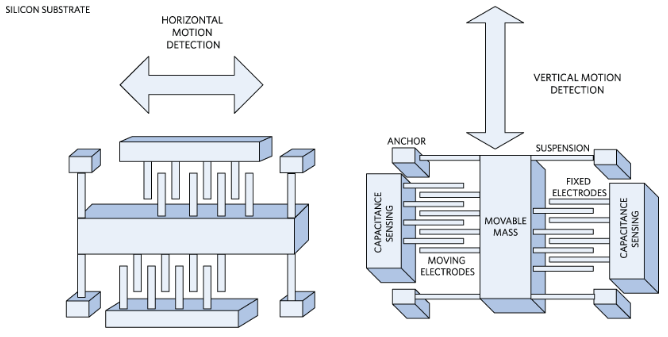
双足机器人本质上是一个**倒立摆(Inverted Pendulum)**系统,天生不稳定。IMU 提供了维持动态平衡最关键的三个数据维度:
-
姿态基准 (Attitude Reference):
- 问题: 机器人的脚踩在软地毯上,或者关节有间隙,会导致躯干倾斜。光靠关节编码器算出来的姿态是错的。
- 解法: IMU 实时输出躯干相对于重力矢量的 Pitch(俯仰)和 Roll(横滚)角。这是控制算法(WBC)判断“我歪没歪”的唯一真理。
-
质心状态估计 (CoM State Estimation):
- 问题: 机器人腾空(跑步/跳跃)时,编码器失效(腿在空中空转)。
- 解法: IMU 的加速度计积分,能算出机器人在空中的飞行轨迹和落地瞬间的速度,指导腿部在何时、何地着陆。
-
高频扰动抑制 (Disturbance Rejection):
- 问题: 被人猛推一把,或者踩到电线。
- 解法: 这种冲击会在几毫秒内产生巨大的加速度突变。视觉(30Hz)太慢来不及反应,只有 IMU(1000Hz+)能瞬间感知并触发“反射式”平衡调节。
2. 关键性能指标:什么样的 IMU 才够用?
普通的消费级 IMU(如手机里的)完全无法满足具身智能的需求。机器人通常需要战术级(Tactical Grade)或工业级高端 IMU。
| 指标 | 具身智能的需求 | 为什么? |
|---|---|---|
| 零偏稳定性<br>(Bias Instability) | < 1°/h (陀螺仪) | 如果零偏大,积分一分钟后,机器人就会觉得自己歪了 5 度,然后为了“回正”反而真的摔倒了。 |
| 更新频率<br>(Update Rate) | ≥ 1000 Hz | 平衡控制回路通常在 500Hz-1kHz 运行,IMU 必须比控制回路更快,尽量减少相位滞后。 |
| 抗振动干扰<br>(Vibration Rejection) | 极高 | 机器人的关节电机(尤其是谐波减速器)在转动时会产生高频震动。IMU 必须能通过硬件/软件滤波把这些噪音滤掉,只保留真实的躯干运动信号。 |
| 全温温漂<br>(Temp. Drift) | 自校准 | 机器人发热严重(GPU/电机就在旁边),温度变化会导致 MEMS 漂移。好的 IMU 自带全温区补偿算法。 |
3. 安装布局:放在哪很有讲究
在人形机器人中,IMU 的安装位置是经过严格动力学计算的。
- 黄金位置:骨盆 (Pelvis) / 躯干 (Torso)
- 原因: 这里是全身运动链的根节点 (Root Link)。
- 这里通常接近机器人的质心 (CoM)。测量这里的数据最能代表机器人整体的运动状态,且受四肢摆动引起的震动干扰最小。
- 辅助位置:头部 (Head)
- 原因: 服务于视觉系统(VIO/SLAM)。
- 头部的 IMU 主要用于消除相机抖动带来的画面模糊,帮助视觉算法在剧烈运动中不丢定位。
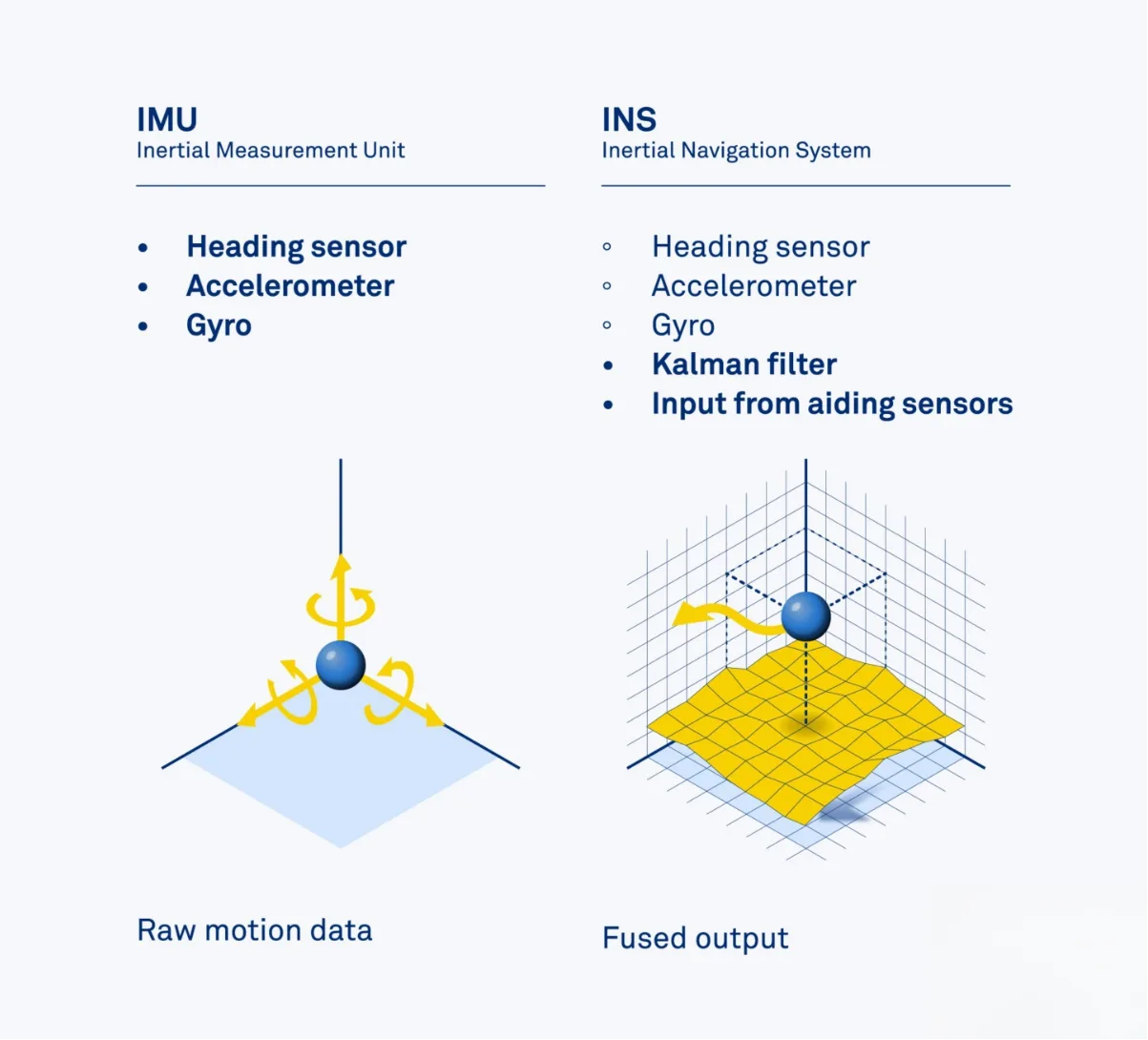
4. 融合算法:IMU 不是一个人在战斗
IMU 虽然快,但有漂移(Drift);视觉虽然准,但慢且容易丢。因此,具身智能的核心算法是 多传感器融合。
-
VRU (Vertical Reference Unit) 算法:
- 利用加速度计感知重力方向(长期准),利用陀螺仪感知角速度(短期快),通过互补滤波 (Complementary Filter) 或 卡尔曼滤波 (EKF),算出一个既快又准的姿态角。
-
LIPM (Linear Inverted Pendulum Model) 状态观测器:
- 输入:IMU 加速度 + 腿部关节编码器 + 脚底接触传感器。
- 输出:精准的质心位置和质心速度。这是 MPC(模型预测控制)算法最重要的输入。
-
VIO (Visual-Inertial Odometry):
- 输入:视觉特征点 + IMU 数据。
- 作用:在 GPS 拒止的室内环境,告诉机器人“我从门口走了 5 米到了桌子前”。
总结
在具身智能领域,IMU 是**“隐形的王者”**。
虽然它不像摄像头和激光雷达那样显眼,但在波士顿动力做后空翻、特斯拉 Optimus 单腿站立的背后,都是高精度 IMU 在毫秒级地与重力进行博弈。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献81条内容
已为社区贡献81条内容

所有评论(0)