智能家居--基于micropython的ESP32开发笔记-upycraft软件以及一些使用方法的记录
拿出来吃灰已久的ESP32,开始盘。这里使用的是nodemcu,优信电子购买。1. 软件下载简单的玩一下ESP的应用的话只是需要下载一个upycraft软件即可。他的下载链接如下:http://download3.dfrobot.com.cn/uPyCraft/uPyCraft.exe2. 下载固件2.1进入到boot模式按下IO1按键然后将串口插入到电脑。(插上去之后就可以松手了)这里其实就是保
拿出来吃灰已久的ESP32,开始盘。
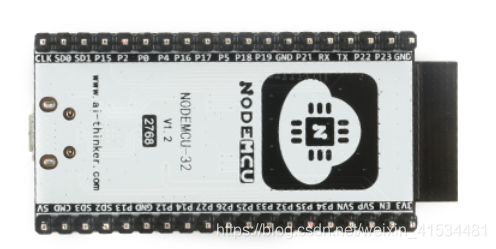
这里使用的是nodemcu,优信电子购买。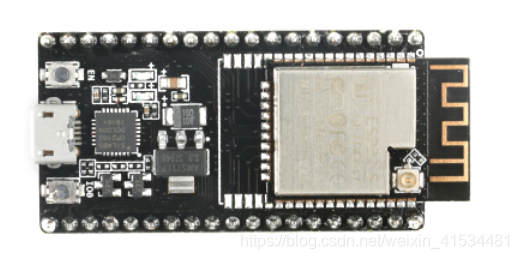
1. 软件下载
简单的玩一下ESP的应用的话只是需要下载一个upycraft软件即可。
他的下载链接如下:
http://download3.dfrobot.com.cn/uPyCraft/uPyCraft.exe
2. 下载固件
2.1进入到boot模式
按下IO1按键 然后将串口插入到电脑。(插上去之后就可以松手了)
这里其实就是保证上电的时候IO1按键是按下的
2.2 选择对应的串口
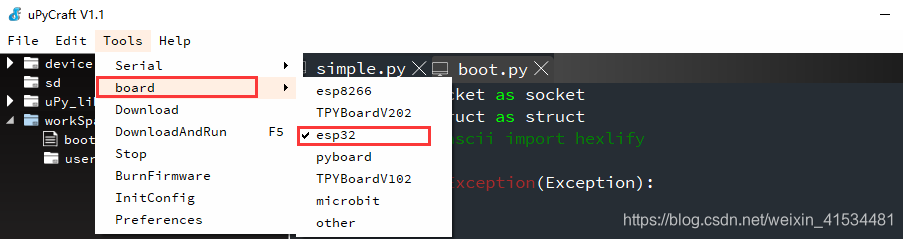
默认的nodemcu不一定是micropython的固件,所以第一步需要先下载一个最新的micropython固件。
2.3 选择设备型号
 这时可能会弹出烧录固件的界面,如果不弹出也可以手动的点对应的界面,使之弹出。
这时可能会弹出烧录固件的界面,如果不弹出也可以手动的点对应的界面,使之弹出。
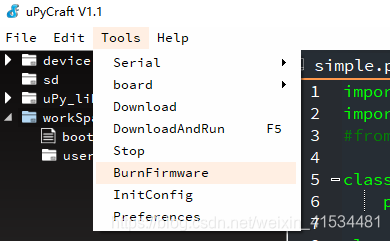
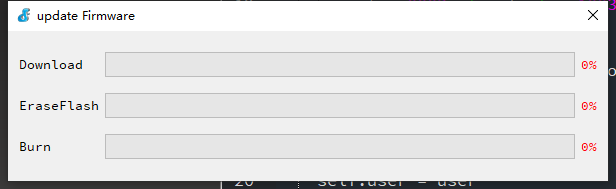
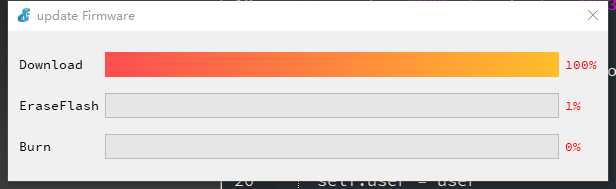
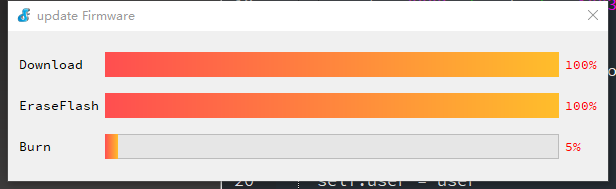
2.4 烧录固件
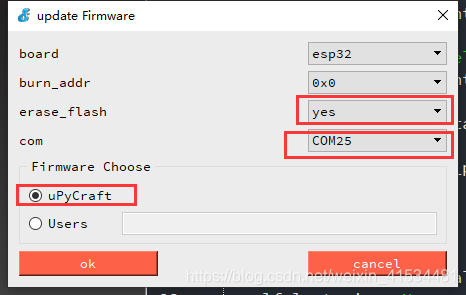 选择你自己的串口号,记得勾选一下擦除flash 电机
选择你自己的串口号,记得勾选一下擦除flash 电机
2.5 重新上电
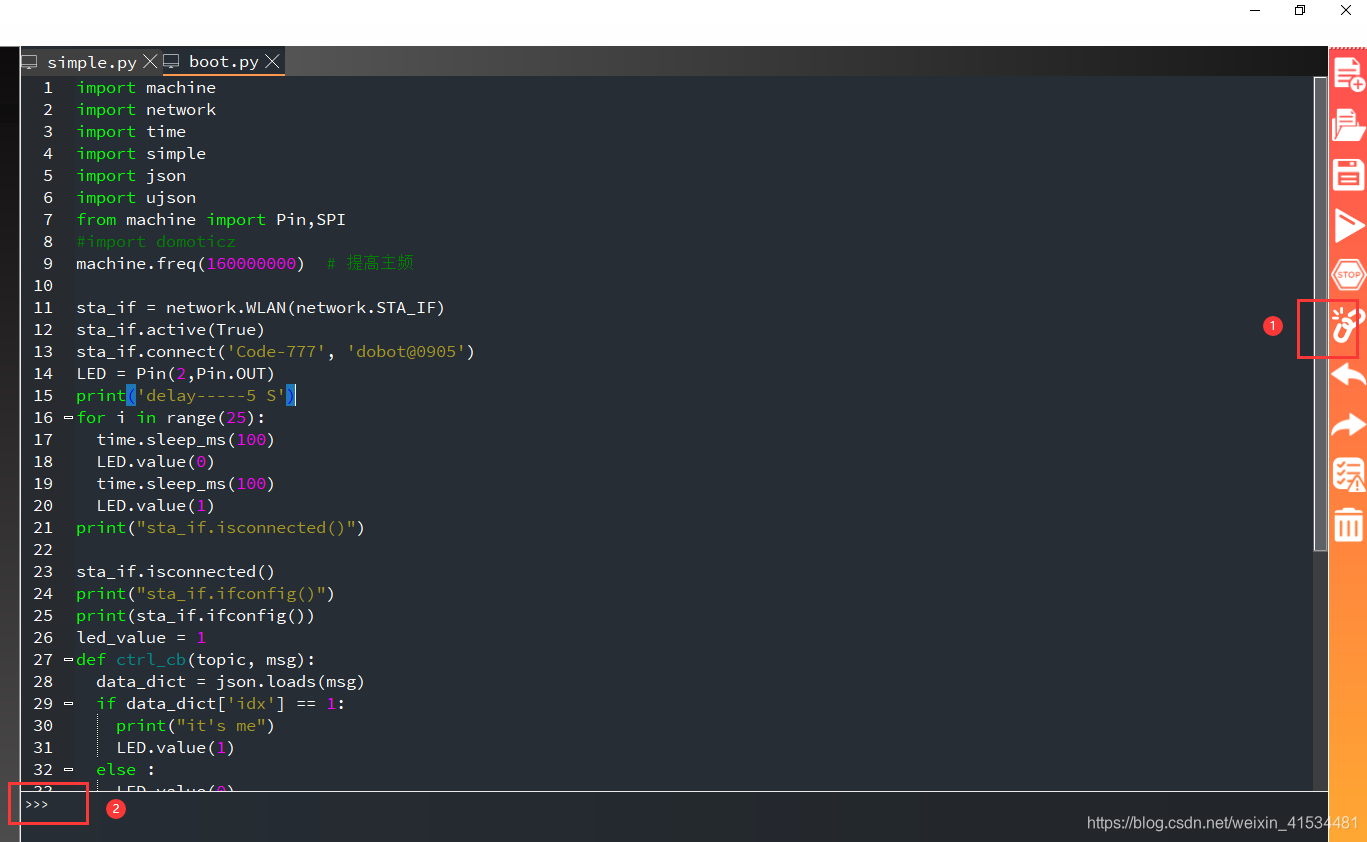
重新上电之后选择串口,可以看到上图中下方的>>> 则证明python 正常的启动
此时就和电脑上的python解释器一样,我们可以输入一定的指令
一些系统的指令的介绍如下(下方截图引自以下网址)
http://docs.dfrobot.com.cn/upycraft/3.1.3%20sys.html

3.0 脚本编程开发
脚本编程开发会存在一个问题,脚本断电之后不运行了。其实这是因为python解释器上电之后默认的执行一个boot.py的脚本。 所以我的做法就是我的主程序直接就叫boot.py
要想运行指定的程序需要发送控制台指令
>>> exec(open('boot.py').read(),globals())
这条指令其实就是你点击三角运行当前程序之后IDE下发的语句,可以调用指定的py文件。 而boot.py会在启动的时候默认执行。
脚本的开发其实就是开发想要的功能
常用的是以下的这些需求
3.1 提高主频
import machine
machine.freq(240000000) # 提高主频
3.2 连接热点
import network
sta_if = network.WLAN(network.STA_IF)
sta_if.active(True)
sta_if.connect('your_ssid', 'yourpasswd')# 这里分别是wifi名字和密码
print('delay-----5 S')
time.sleep_ms(5000) #等待连接
print("sta_if.isconnected()")
sta_if.isconnected()
print("sta_if.ifconfig()")
print(sta_if.ifconfig()) #打印一下连接的状态,如果连接上会打印当前的ip 网关等
运行的效果如下:
Ready to download this file,please wait!
........
download ok
exec(open('boot.py').read(),globals())
delay-----5 S
sta_if.isconnected()
sta_if.ifconfig()
('192.168.1.102', '255.255.255.0', '192.168.1.1', '202.96.134.33')
#打印一下连接的状态,如果连接上会打印当前的ip 网关等
3.3 闪灯
#hardware platform: FireBeetle-ESP32
#Result: Blink
#The information below shows blink is unavailble for the current version.
#IO0 IO4 IO10 IO12~19 IO21~23 IO25~27
#Except the connection between IO2 and onboard LED, other pins need to connect to external LEDs.
import time
from machine import Pin
led=Pin(2,Pin.OUT) #create LED object from pin2,Set Pin2 to output
while True:
led.value(1) #Set led turn on
time.sleep(0.5)
led.value(0) #Set led turn off
time.sleep(0.5)
3.4 MQTT的连接
建议参考以下地址:
http://docs.dfrobot.com.cn/upycraft/4.3.1%20mqtt.py.html
参考这里可以实现一个简单的MQTT 订阅者,在运行程序的时候需要将MQTT的依赖程序 simply.py 和boot.py 都上传到文件系统中才可以运行。
我的操作时在simply 的界面点 运行,此时会将这个文件上传到文件系统,但是因为没有执行语句会直接执行完毕,接着在boot.py 的界面 点运行 下载boot.py到文件系统,此时真正的运行起来。
一份简单的例子:
simply.py 官方提供的
import usocket as socket
import ustruct as struct
#from ubinascii import hexlify
class MQTTException(Exception):
pass
class MQTTClient:
def __init__(self, client_id, server, port=0, user=None, password=None, keepalive=0,ssl=False, ssl_params={}):
if port == 0:
port = 8883 if ssl else 1883
self.client_id = client_id
self.sock = None
self.addr = socket.getaddrinfo(server, port)[0][-1]
self.ssl = ssl
self.ssl_params = ssl_params
self.pid = 0
self.cb = None
self.user = user
self.pswd = password
self.keepalive = keepalive
self.lw_topic = None
self.lw_msg = None
self.lw_qos = 0
self.lw_retain = False
def _send_str(self, s):
self.sock.write(struct.pack("!H", len(s)))
self.sock.write(s)
def _recv_len(self):
n = 0
sh = 0
while 1:
b = self.sock.read(1)[0]
n |= (b & 0x7f) << sh
if not b & 0x80:
return n
sh += 7
def set_callback(self, f):
self.cb = f
def set_last_will(self, topic, msg, retain=False, qos=0):
assert 0 <= qos <= 2
assert topic
self.lw_topic = topic
self.lw_msg = msg
self.lw_qos = qos
self.lw_retain = retain
def connect(self, clean_session=True):
self.sock = socket.socket()
self.sock.connect(self.addr)
if self.ssl:
import ussl
self.sock = ussl.wrap_socket(self.sock, **self.ssl_params)
msg = bytearray(b"\x10\0\0\x04MQTT\x04\x02\0\0")
msg[1] = 10 + 2 + len(self.client_id)
msg[9] = clean_session << 1
if self.user is not None:
msg[1] += 2 + len(self.user) + 2 + len(self.pswd)
msg[9] |= 0xC0
if self.keepalive:
assert self.keepalive < 65536
msg[10] |= self.keepalive >> 8
msg[11] |= self.keepalive & 0x00FF
if self.lw_topic:
msg[1] += 2 + len(self.lw_topic) + 2 + len(self.lw_msg)
msg[9] |= 0x4 | (self.lw_qos & 0x1) << 3 | (self.lw_qos & 0x2) << 3
msg[9] |= self.lw_retain << 5
self.sock.write(msg)
#print(hex(len(msg)), hexlify(msg, ":"))
self._send_str(self.client_id)
if self.lw_topic:
self._send_str(self.lw_topic)
self._send_str(self.lw_msg)
if self.user is not None:
self._send_str(self.user)
self._send_str(self.pswd)
resp = self.sock.read(4)
assert resp[0] == 0x20 and resp[1] == 0x02
if resp[3] != 0:
raise MQTTException(resp[3])
return resp[2] & 1
def disconnect(self):
self.sock.write(b"\xe0\0")
self.sock.close()
def ping(self):
self.sock.write(b"\xc0\0")
def publish(self, topic, msg, retain=False, qos=0):
pkt = bytearray(b"\x30\0\0\0")
pkt[0] |= qos << 1 | retain
sz = 2 + len(topic) + len(msg)
if qos > 0:
sz += 2
assert sz < 2097152
i = 1
while sz > 0x7f:
pkt[i] = (sz & 0x7f) | 0x80
sz >>= 7
i += 1
pkt[i] = sz
#print(hex(len(pkt)), hexlify(pkt, ":"))
self.sock.write(pkt, i + 1)
self._send_str(topic)
if qos > 0:
self.pid += 1
pid = self.pid
struct.pack_into("!H", pkt, 0, pid)
self.sock.write(pkt, 2)
self.sock.write(msg)
if qos == 1:
while 1:
op = self.wait_msg()
if op == 0x40:
sz = self.sock.read(1)
assert sz == b"\x02"
rcv_pid = self.sock.read(2)
rcv_pid = rcv_pid[0] << 8 | rcv_pid[1]
if pid == rcv_pid:
return
elif qos == 2:
assert 0
def subscribe(self, topic, qos=0):
assert self.cb is not None, "Subscribe callback is not set"
pkt = bytearray(b"\x82\0\0\0")
self.pid += 1
struct.pack_into("!BH", pkt, 1, 2 + 2 + len(topic) + 1, self.pid)
#print(hex(len(pkt)), hexlify(pkt, ":"))
self.sock.write(pkt)
self._send_str(topic)
self.sock.write(qos.to_bytes(1, "little"))
while 1:
op = self.wait_msg()
if op == 0x90:
resp = self.sock.read(4)
#print(resp)
assert resp[1] == pkt[2] and resp[2] == pkt[3]
if resp[3] == 0x80:
raise MQTTException(resp[3])
return
# Wait for a single incoming MQTT message and process it.
# Subscribed messages are delivered to a callback previously
# set by .set_callback() method. Other (internal) MQTT
# messages processed internally.
def wait_msg(self):
res = self.sock.read(1)
self.sock.setblocking(True)
if res is None:
return None
if res == b"":
raise OSError(-1)
if res == b"\xd0": # PINGRESP
sz = self.sock.read(1)[0]
assert sz == 0
return None
op = res[0]
if op & 0xf0 != 0x30:
return op
sz = self._recv_len()
topic_len = self.sock.read(2)
topic_len = (topic_len[0] << 8) | topic_len[1]
topic = self.sock.read(topic_len)
sz -= topic_len + 2
if op & 6:
pid = self.sock.read(2)
pid = pid[0] << 8 | pid[1]
sz -= 2
msg = self.sock.read(sz)
self.cb(topic, msg)
if op & 6 == 2:
pkt = bytearray(b"\x40\x02\0\0")
struct.pack_into("!H", pkt, 2, pid)
self.sock.write(pkt)
elif op & 6 == 4:
assert 0
# Checks whether a pending message from server is available.
# If not, returns immediately with None. Otherwise, does
# the same processing as wait_msg.
def check_msg(self):
self.sock.setblocking(False)
return self.wait_msg()
import machine
import network
import time
import simple
import json
import ujson
from machine import Pin,SPI
#import domoticz
machine.freq(240000000) # 提高主频
sta_if = network.WLAN(network.STA_IF)
sta_if.active(True)
sta_if.connect('ssid', 'passwd') # wifi名字和密码
LED = Pin(2,Pin.OUT)
gc.enable()
print('delay-----5 S')
for i in range(25):
time.sleep_ms(100)
LED.value(0)
time.sleep_ms(100)
LED.value(1)
print("sta_if.isconnected()")
sta_if.isconnected()
print("sta_if.ifconfig()")
print(sta_if.ifconfig())
led_value = 1
# 这个是mqtt的回调函数,如果检测到有新的消息下发,那么回去调用这个函数
def ctrl_cb(topic, msg):
data_dict = json.loads(msg)
if data_dict['idx'] == 1:
print("it's me")
LED.value(1)
else :
LED.value(0)
print(msg)
c = simple.MQTTClient('esp8266', '111.111.111.111', 1883) # 这里需要你的MQTT服务端
c.set_callback(ctrl_cb) # 注册回调函数
c.connect() # 连接到你的服务器
c.subscribe('/') # 设置订阅的主题
c.publish('/',"this is a message",1) # 发布一条消息
while True:
c.check_msg()
time.sleep_ms(2000)
关于mqtt 有个不错的测试工具分享一下
链接:https://pan.baidu.com/s/1snw49nMgujf7lWpNqGNnug
提取码:1111
复制这段内容后打开百度网盘手机App,操作更方便哦--来自百度网盘超级会员V5的分享
困了有缘再写。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)