linux下发布点云数据库,velodyne VLP-16 ros下获取点云数据(超详细教程)
参考文献:http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16https://blog.csdn.net/zz2862625432/article/details/78112707https://blog.csdn.net/GroundWalker/article/detai
参考文献:
http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16
https://blog.csdn.net/zz2862625432/article/details/78112707
https://blog.csdn.net/GroundWalker/article/details/84331527
环境:ubuntu16.04,VLP-16激光雷达,kinetic包
1. 安装驱动
sudo apt-get install ros-kinetic-velodyne
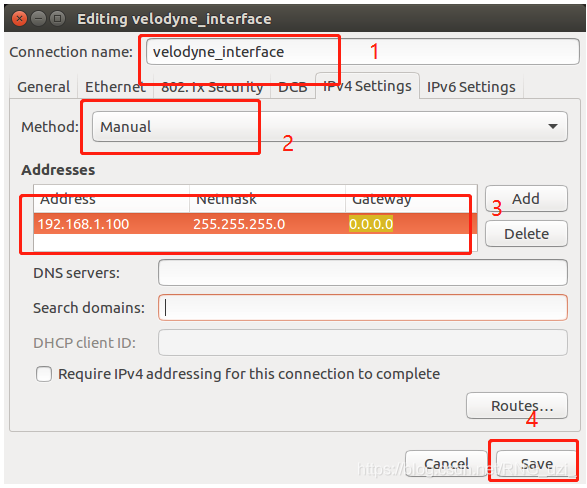
2. 配置网络,连接到激光雷达,(不需要关闭无线):
修改有线网络里面的ipv4:( 改为手动)
IP地址192.168.1.77,子网掩码255.255.255.0,网关192.168.1.1。
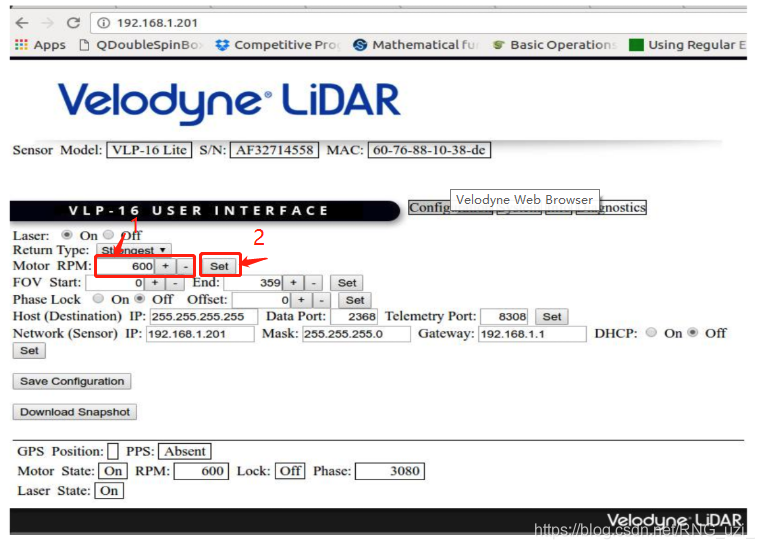
( 上面设置好之后,连接该无线,此时会断网)然后接入激光雷达,打开浏览器输入192.168.1.201可以看到激光雷达的配置文件。
每次接入雷达后,输入下面两条指令:
sudo ifconfig enp2s0 192.168.1.123
sudo route add 192.168.1.201 enp2s0
3. 创建新的ROS工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin_make
source devel/setup.bash
4、把Velodyne XML文件转成ROS节点的YAML文件,VLP-16.xml据说赠送的U盘里面有,反正我是没有找到,
就从网上下载了一 个。记得把下面的地址更改为自己的VLP-16.xml文件的地址。
rosrun velodyne_pointcloud gen_calibration.py ~/VLP-16.xml (更改为自己保存的目录)
5、加载roslaunch velodyne_pointcloud VLP16_points.launch calibration:=~/VLP-16.yaml (更改为自己保存的目录)
注意:4、5步没有找到VLP-16.xml文件,不执行这两步,后面依然可以显示结果。**
6. 实时显示点云图:
a、在terminal中输入 roscore
b、打开另一个 terminal,分别输入
roslaunch velodyne_pointcloud VLP16_points.launch
rosrun rviz rviz -f velodyne
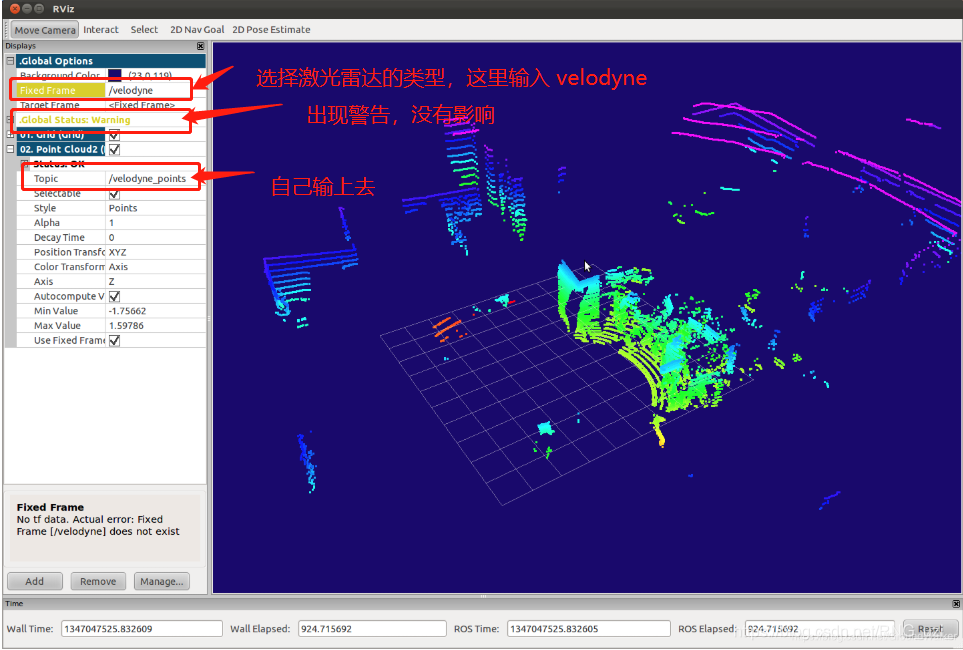
左下角Add,选择PointCloud2,Topic一栏填写/velodyne_points
7. 数据保存(格式为.bag数据)
rosbag record -O out /velodyne_points
只保存/velodyne_points这个topic的数据(可以用rostopic list -v开看当前可用的topic),保存在当前目录的out.bag
可尝试按ctrl+c退出,不是ctrl+z
8. bag转.pcd
参考:http://wiki.ros.org/pcl_ros
方法一:bag_to_pcd
rosrun pcl_ros bag_to_pcd
# 创建文件夹,将文件保存在文件夹内
# example:
rosrun pcl_ros bag_to_pcd data.bag /velodyne_points ./pcd
9. pcl_viewer显示.pcd点云
pcl_viewer
如果没有安装pcl_viewer模块,可以使用`sudo apt-get install pcl_viewer`
Linux 下可直接在命令行输入 `pcl_viewr path/to/.pcd`或.vtk可直接显示pcl中的点云文件。
#如果是在当前文件夹下直接创建terminal,可以直接输入`pcl_viewr xxx.pcd`
pcl_viewr几个常用的命令:
r键: 重现视角。如果读入文件没有在主窗口显示,不妨按下键盘的r键一试。
j键:截图功能。
g键:显示/隐藏 坐标轴。
鼠标:左键,使图像绕自身旋转; 滚轮, 按住滚轮不松,可移动图像,滚动滚轮,可放大/缩小 图像; 右键,“原地”放大/缩小。
-/+:-(减号)可缩小点; +(加号),可放大点。
pcl_viewe -bc r,g,b /path/to/.pcd:可改变背景色.
pcl_viewer还可以用来直接显示pfh,fpfh(fast point feature histogram),vfh等直方图。
常用的pcl_viewer 好像就这些,其他未涉及到的功能可通过pcl_viewer /path/.pcd 打开图像,按键盘h(获取帮助)的方式获得

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)