时空数据挖掘二(城市计算)
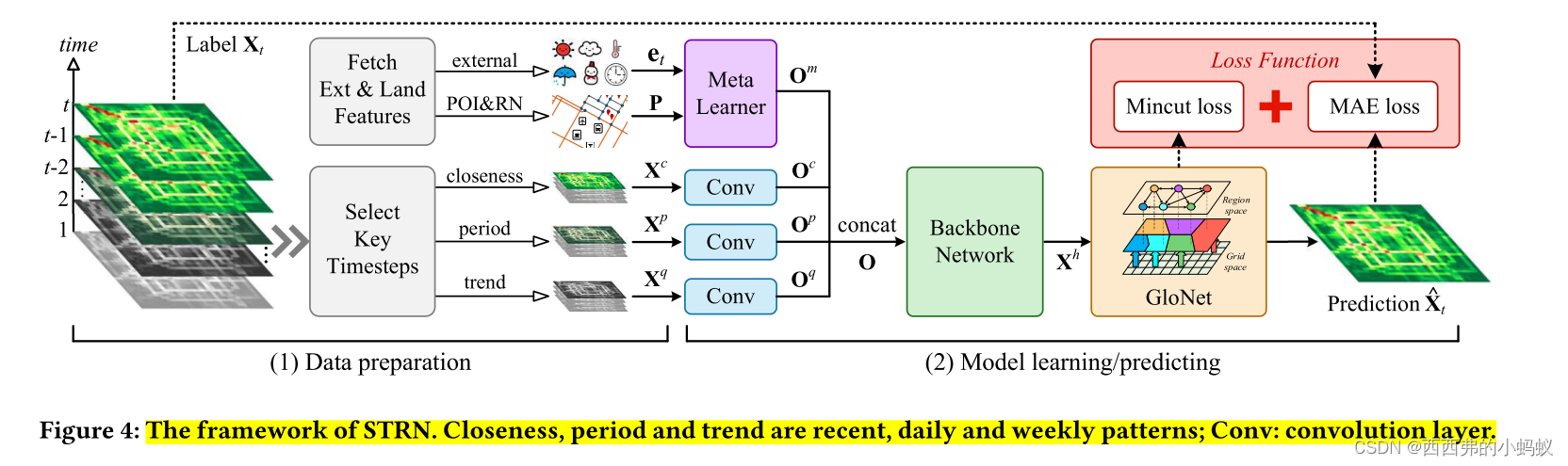
城市流量预测有益于智慧城市的诸多方面,如交通管理、风险评估等。然而,这些好处的一个关键前提是对城市有细致的了解。与以往局限于粗粒度数据的工作不同,本文将城市流量预测的视野扩展到细粒度,提出了特定的挑战:1)细粒度数据中观察到的网格间过渡的优势,使捕捉全球尺度上网格单元之间的空间依赖关系变得更加复杂;2)单独学习外部因素(如天气)对大量网格单元的影响非常具有挑战性。为了应对这两个挑战,本文提出了一种用于细粒度城市流量预测的时空关系网络(STRN)。首先,使用骨干网来学习每个cell的高级表示。提出了一个全局关系模块(GloNet),与现有方法相比,能更有效地捕获全局空间依赖关系。设计了一个元学习器,将外部因素和地块功能(如POI密度)作为输入,以产生元知识并提高模型性能。在两个真实的数据集上进行了广泛的实验。实验结果表明,与目前最先进的方法相比,STRN在使用更少参数的情况下,误差降低了7.1% ~ 11.5%。此外,我们还部署了一个名为UrbanFlow 3.0的云系统,以展示该方法的实用性。
原因:
1) Global spatial dependencies
2) External factors &Land functions.

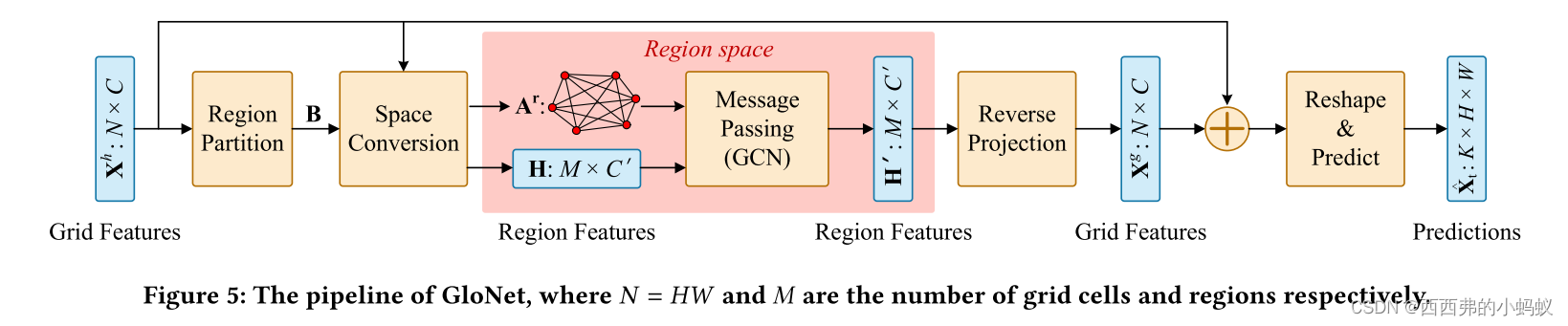
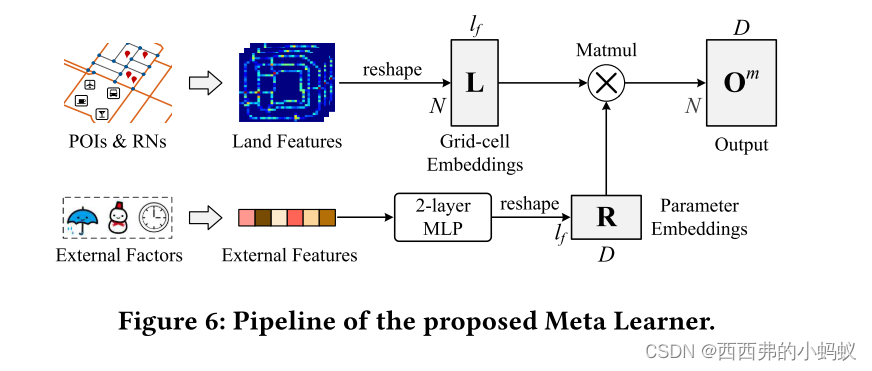
本文提出一种新的结构(GloNet)来捕获全局空间依赖关系。我们将一个城市划分为𝑁网格单元。与直接建模所有网格间相关性(完全𝑁2相关性)的DeepSTN+相比,在更高的语义级别(即区域级别)上执行关系推理,该级别对捕捉这种全局关系更友好。如图2(b)所示,我们首先执行从网格空间到区域空间(𝑀regions)的转换,然后通过消息传递推断全局区域相关性。由于区域语义随时间变化,基于最小割理论的新损失使模型能够动态地将地图划分为不规则区域。最后,将特征投影回网格空间,得到全局感知特征。这样,我们的方法只需要对所有区域对之间的𝑀2相关性进行建模1,其中通常𝑀≪𝑁。此外,提出一种基于矩阵分解的元学习器,使细胞对随时间变化的外部因素产生特异性响应。与DeepST和ST-ResNet相比,所提出的元学习器不仅考虑了潜区域函数,而且独立于map分辨率。因此,它在细粒度设置中更轻量和实用。与DeepSTN+相比,该模块可以捕捉细胞对外部因素的特异性反应,并学习到更好的表示
Modeling Trajectories with Neural Ordinary Differential Equations
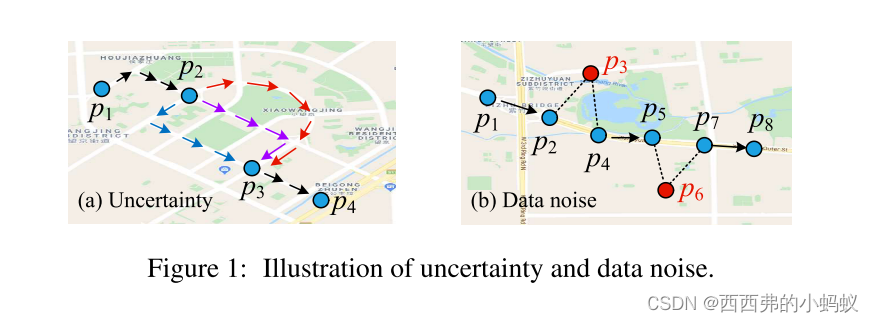
近年来位置获取技术的发展产生了海量的空间轨迹数据。循环神经网络(rnn)是对此类轨迹数据进行建模的现代工具。在重新审视基于rnn的轨迹建模方法后,揭示了现有使用中两个常见的关键缺陷。首先,rnn是离散时间模型,仅在新观测到达时更新隐藏状态,这使得它们不适合于学习具有连续时间动态的真实世界轨迹。其次,由于意外的传感器噪声,现实世界的轨迹永远不会完全准确。大多数基于rnn的方法都是确定性的,因此容易受到这种噪声的影响。为应对这些挑战,本文设计了一种新的方法TrajODE,以更自然地建模轨迹。它结合了神经常微分方程(ODE)的连续时间特性和随机潜空间的鲁棒性。在轨迹分类任务上的广泛实验证明了所提出框架相对于RNN对应的框架的优越性。


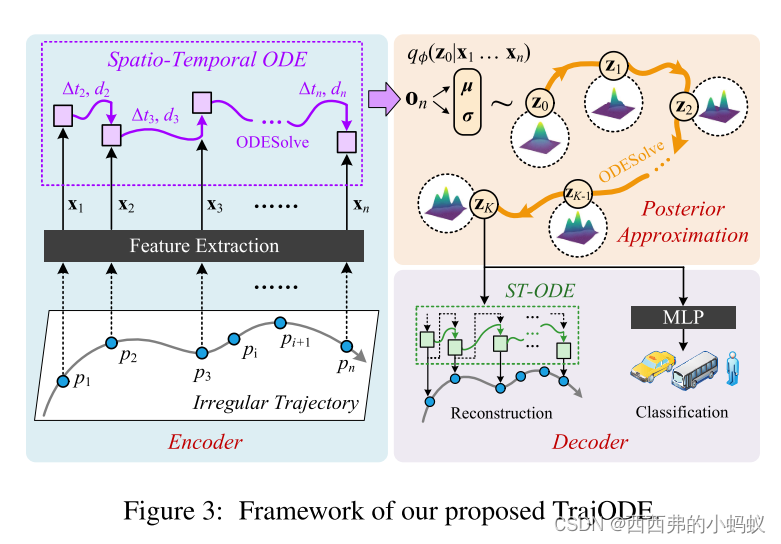
给定一个轨迹T = p1→p2→···→pn,我们的任务是识别整个轨迹的模式。图3展示了解决这个问题的TrajODE框架,它由三个主要组件组成:

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)