ISP:demosaic(1)双线性插值篇
1.概述
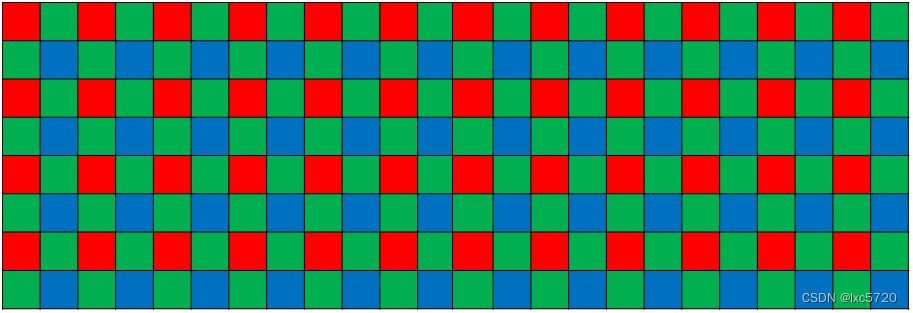
当涉及到数字图像传感器捕获的图像数据,我们通常会遇到 Bayer 格式排列的情况。这意味着每个像素位置仅捕获了红、绿、蓝三种颜色中的一种。去马赛克(Demosaicing)是一种图像处理技术,旨在从这些单一颜色通道的数据中恢复出完整的彩色图像。双线性插值是其中一种常用的去马赛克算法,本文将介绍双线性插值的原理和实现方法。
2.什么是双线性插值?
在 Bayer 格式排列的图像中,每个像素的颜色信息是不完整的,因为它只包含了一个颜色通道的数据。为了获得完整的彩色信息,我们需要使用邻近像素的值来估计缺失的颜色。双线性插值是一种常用的插值方法,它使用周围四个已知像素的加权平均来估计缺失像素的值,从而恢复出完整的彩色图像。
2.1双线性插值原理
双线性插值基于以下思想:假设我们要恢复的缺失像素位于四个已知像素的交叉点上,我们可以根据其相对位置在水平和垂直方向上分别进行线性插值,然后再将两个方向上的插值结果进行加权平均,从而得到最终的估计值。假设我们要估计的像素P位于四个已知像素 A、B、C 和 D 的交叉点上,如下所示:
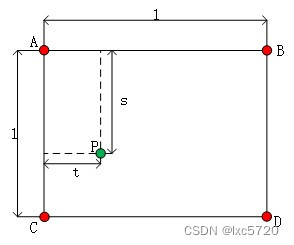
首先,我们在水平方向上对像素进行线性插值,得到两个临时值 X1 和 X2:
其中,t 是待估像素P在水平方向上相对于 A 和 B 的位置。然后,在垂直方向上对临时值进行线性插值,得到最终的估计像素值 P:
其中,s 是待估像素P在垂直方向上相对于 A 和 C 的位置。这样,通过双线性插值,我们可以从周围的已知像素值估计出待估像素的值,从而恢复出完整的彩色图像。
3.OpenCV实现双线性插值去马赛克
- 读取 Bayer 格式排列的图像。
- 遍历图像的每个像素,根据其位置进行双线性插值计算。
- 将插值得到的像素值填充到新的彩色图像中。
- 将处理后的彩色图像保存或显示。
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int main()
{
//raw图是:
//RG
//GB格式
Mat rawImg = imread("D:\\CODE\\M_ISP\\Read_Raw\\result.tif",-1);
Mat rgbImg = Mat::zeros(rawImg.rows, rawImg.cols, CV_16UC3);
//下面通过双线性插值进行demosiac
for (int i = 0; i < rawImg.rows; i++)
{
for (int j = 0; j < rawImg.cols; j++)
{
//判断是偶数列还是奇数列
int x = i % 2;//行
int y = j % 2;//列
//插值邻域像素及边界检查
int x1 = i - 1 < 0 ? 1 : i - 1;
int x2 = i + 1 > (rawImg.rows - 1) ? (rawImg.rows - 1) : i + 1;
int y1 = j - 1 < 0 ? 1 : j - 1;
int y2 = j + 1 > (rawImg.cols - 1) ? (rawImg.cols - 1) : j + 1;
if (x==1&&y==1)// x=0,y=1表示该点是B点,该点需要插值G和R通道,都是通过周围4个点进行插值
{
rgbImg.at<Vec3w>(i, j)[0] = rawImg.at<ushort>(i, j);//B
rgbImg.at<Vec3w>(i, j)[2] = 0.25 * (rawImg.at<ushort>(x1, y1) + rawImg.at<ushort>(x1, y2) +
rawImg.at<ushort>(x2, y1) + rawImg.at<ushort>(x2, y2));//G
rgbImg.at<Vec3w>(i, j)[1] = 0.25 * (rawImg.at<ushort>(x1, j ) + rawImg.at<ushort>(i, y1) +
rawImg.at<ushort>(x2, j) + rawImg.at<ushort>(i, y2));//R
}
if (x==0&&y==0)// x=0,y=0表示该点是R点,该点需要插值B和G通道,都是通过周围4个点进行插值
{
rgbImg.at<Vec3w>(i, j)[0] = 0.25 * (rawImg.at<ushort>(x1, y1) + rawImg.at<ushort>(x1, y2) +
rawImg.at<ushort>(x2, y1) + rawImg.at<ushort>(x2, y2));//B
rgbImg.at<Vec3w>(i, j)[1] = 0.25 * (rawImg.at<ushort>(x1, j) + rawImg.at<ushort>(i, y1) +
rawImg.at<ushort>(x2, j) + rawImg.at<ushort>(i, y2));//G
rgbImg.at<Vec3w>(i, j)[2] = rawImg.at<ushort>(i, j);//R
}
if (x == 0 && y == 1)// x=0,y=10表示该点是Gr点,该点需要插值R和B通道,都是通过周围2个点进行插值
{
rgbImg.at<Vec3w>(i, j)[0] = 0.5 * (rawImg.at<ushort>(x1, j) + rawImg.at<ushort>(x2, j));//B
rgbImg.at<Vec3w>(i, j)[1] = rawImg.at<ushort>(i, j);//G
rgbImg.at<Vec3w>(i, j)[2] = 0.5 * (rawImg.at<ushort>(i, y1) + rawImg.at<ushort>(i, y2));//R
}
if (x == 1 && y == 0)// x=0,y=10表示该点是Gb点,该点需要插值R和B通道,都是通过周围2个点进行插值
{
rgbImg.at<Vec3w>(i, j)[0] = 0.5 * (rawImg.at<ushort>(i, y1) + rawImg.at<ushort>(i, y2));//B
rgbImg.at<Vec3w>(i, j)[1] = rawImg.at<ushort>(i, j);//G
rgbImg.at<Vec3w>(i, j)[2] = 0.5 * (rawImg.at<ushort>(x1, j) + rawImg.at<ushort>(x2, j));//R
}
}
}
cv::Mat normalized_image;
cv::normalize(rgbImg, normalized_image, 0, 255, cv::NORM_MINMAX, CV_8U);
cv::imshow("插值结果", rgbImg);
return 0;
}4. 结语
双线性插值是一种简单的去马赛克方法,用于恢复单一传感器采集的图像中缺失的颜色信息。虽然它在许多情况下效果良好,但也有一些优点和缺点需要考虑。
优点:
-
简单而快速: 双线性插值相对于其他复杂的去马赛克方法来说比较简单,因此计算速度较快。这在实时性要求较高的应用中可能很有优势。
-
适用于大多数场景: 双线性插值通常对于大部分图像场景都能产生合理的结果,尤其是在图像上的颜色变化相对平滑的地方。
-
较少的伪影: 相对于一些更复杂的算法,双线性插值产生的伪影较少,尤其是在颜色变化不剧烈的区域。
-
计算成本低: 双线性插值只需要使用周围相邻像素的加权平均,因此它的计算成本相对较低。
缺点:
-
不适用于高对比度区域: 双线性插值在处理高对比度的区域(如边缘)时可能会导致锐化效应,产生边缘伪影。
-
颜色伪影: 在一些情况下,双线性插值可能会在颜色变化明显的区域产生颜色伪影,因为它无法准确地捕捉到颜色的变化。
-
细节损失: 双线性插值不能处理非常细微的细节,因为它只考虑了相邻像素的信息,而没有考虑更大范围的上下文。
-
不适用于 Bayer 格式之外的数据: 双线性插值是一种特定于 Bayer 格式的方法,如果你的图像采集系统不是使用 Bayer 格式排列传感器数据,这种方法就不适用。
在本篇博客中,介绍了 Bayer 格式的图像数据排列和双线性插值算法的原理。通过使用 OpenCV,实现了双线性插值去马赛克算法,从而恢复出高质量的彩色图像。去马赛克是数字图像处理中一个重要且复杂的步骤,它在图像获取和处理中发挥着关键作用。通过本篇博客,你现在应该能够理解并实现双线性插值去马赛克算法了。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)