RRT算法优化(3)
RRT算法(Rapidly-exploring Random Tree)是一种用于路径规划的算法,旨在快速生成连续空间中的随机样本,以探索未知环境并找到最佳路径。该算法最初由Steven M. LaValle于1998年提出,被广泛应用于机器人领域、自动驾驶和虚拟现实等领域。RRT算法的核心思想是通过不断扩展树结构来探索搜索空间。算法从起始状态开始,每次随机生成一个点,并找到树中最接近的节点,然后
RRT算法
RRT算法(Rapidly-exploring Random Tree)是一种用于路径规划的算法,旨在快速生成连续空间中的随机样本,以探索未知环境并找到最佳路径。该算法最初由Steven M. LaValle于1998年提出,被广泛应用于机器人领域、自动驾驶和虚拟现实等领域。
RRT算法的核心思想是通过不断扩展树结构来探索搜索空间。算法从起始状态开始,每次随机生成一个点,并找到树中最接近的节点,然后沿着这个方向扩展树。通过不断重复这个过程,最终可以找到一条连接起始状态和目标状态的路径。
import matplotlib.pyplot as plt
import numpy as np
class Node:
def __init__(self, x, y):
self.x = x
self.y = y
self.parent = None
def is_collision_free(node, obstacles):
# 在这里实现碰撞检测逻辑,检测节点是否在障碍物内或与障碍物相交
# 这里只是一个示例,假设没有碰撞
return True
def generate_random_node(max_x, max_y):
x = np.random.uniform(0, max_x)
y = np.random.uniform(0, max_y)
return Node(x, y)
def nearest_node(random_node, nodes):
# 计算最近节点
nearest_dist = float('inf')
nearest_node = None
for node in nodes:
dist = np.sqrt((random_node.x - node.x)**2 + (random_node.y - node.y)**2)
if dist < nearest_dist:
nearest_dist = dist
nearest_node = node
return nearest_node
def steer(from_node, to_node, max_distance):
# 将节点从起始位置移动到目标位置,但不超过最大距离
delta_x = to_node.x - from_node.x
delta_y = to_node.y - from_node.y
distance = np.sqrt(delta_x**2 + delta_y**2)
if distance < max_distance:
return to_node
else:
scale = max_distance / distance
new_x = from_node.x + delta_x * scale
new_y = from_node.y + delta_y * scale
return Node(new_x, new_y)
def plot_tree(nodes):
for node in nodes:
if node.parent is not None:
plt.plot([node.x, node.parent.x], [node.y, node.parent.y], 'b-')
plt.xlabel('X')
plt.ylabel('Y')
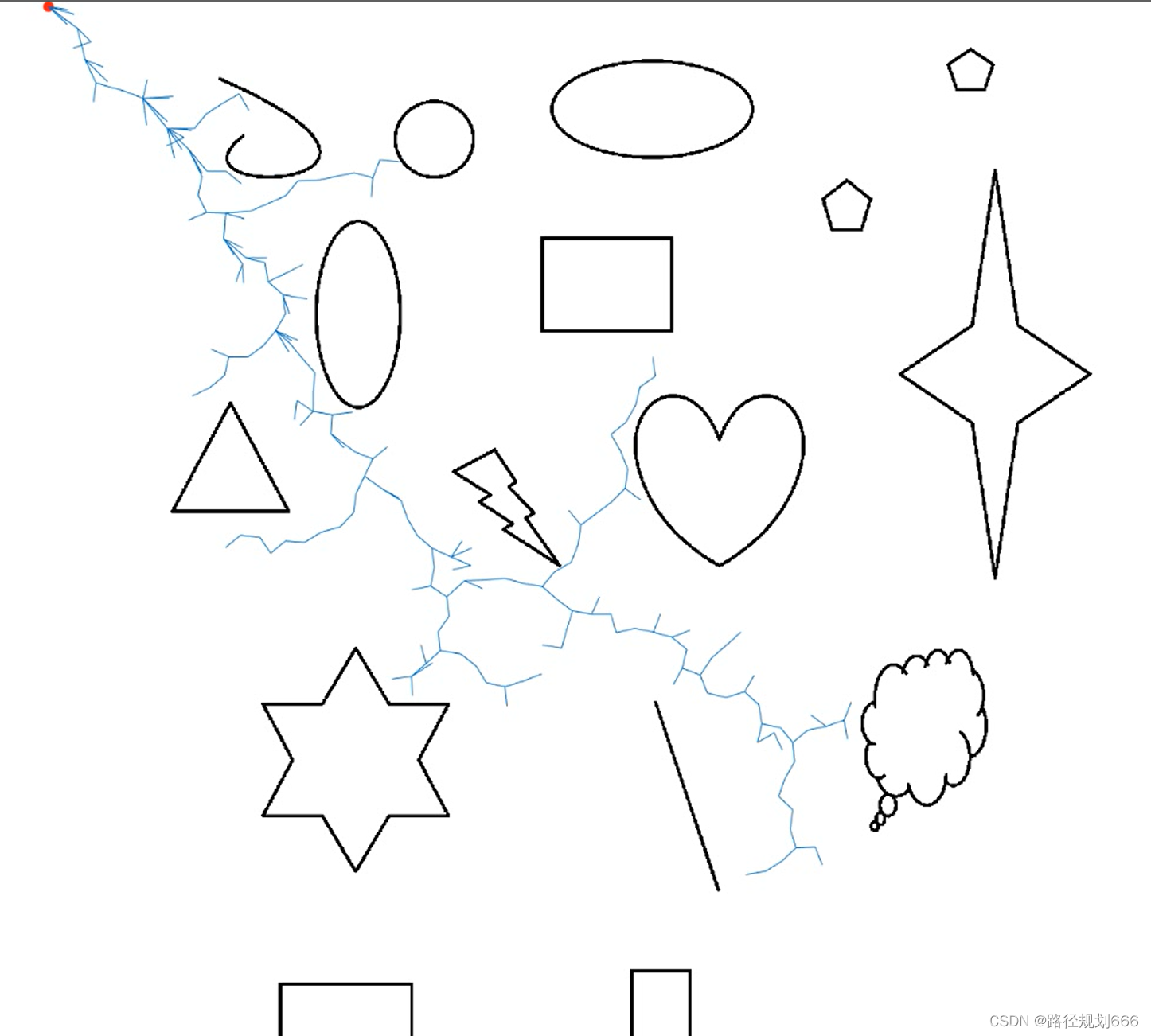
plt.title('RRT')
plt.grid(True)
plt.show()
def rrt(start, goal, max_iter, max_distance, obstacles):
nodes = [start]
for _ in range(max_iter):
random_node = generate_random_node(10, 10) # 生成随机节点
nearest = nearest_node(random_node, nodes) # 找到最近节点
new_node = steer(nearest, random_node, max_distance) # 从最近节点到达新节点
if is_collision_free(new_node, obstacles): # 检查新节点是否碰撞
new_node.parent = nearest
nodes.append(new_node)
if np.sqrt((new_node.x - goal.x)**2 + (new_node.y - goal.y)**2) < max_distance:
goal.parent = new_node
nodes.append(goal)
plot_tree(nodes)
return nodes
return None
start = Node(1, 1)
goal = Node(9, 9)
max_iter = 1000
max_distance = 0.5
obstacles = [] # 这里假设没有障碍物
rrt(start, goal, max_iter, max_distance, obstacles)
RRT算法的优势之一是其在高维空间中的高效性。与其他传统的路径规划算法相比,RRT算法能够快速生成路径,并且不需要提前对搜索空间进行建模。这使得RRT算法在实时规划和动态环境中具有很大的优势。
另一个RRT算法的优点是其对于非凸障碍物的处理能力。由于RRT算法是基于树结构的,因此可以有效地避开非凸障碍物,并找到避让路径。这使得RRT算法在复杂环境中的路径规划具有很好的鲁棒性。
虽然RRT算法有很多优点,但也存在一些局限性。例如,RRT算法在搜索空间较大时可能会收敛较慢,需要进行一定的优化。此外,RRT算法对于动态环境中的路径规划也存在一定的挑战,需要结合其他技术进行改进。
总的来说,RRT算法作为一种高效的路径规划算法,在机器人领域和自动驾驶领域有着广泛的应用前景。通过不断优化和改进,RRT算法将能够更好地应对复杂环境和动态情况,为智能系统的发展提供更多可能性。
路径优化
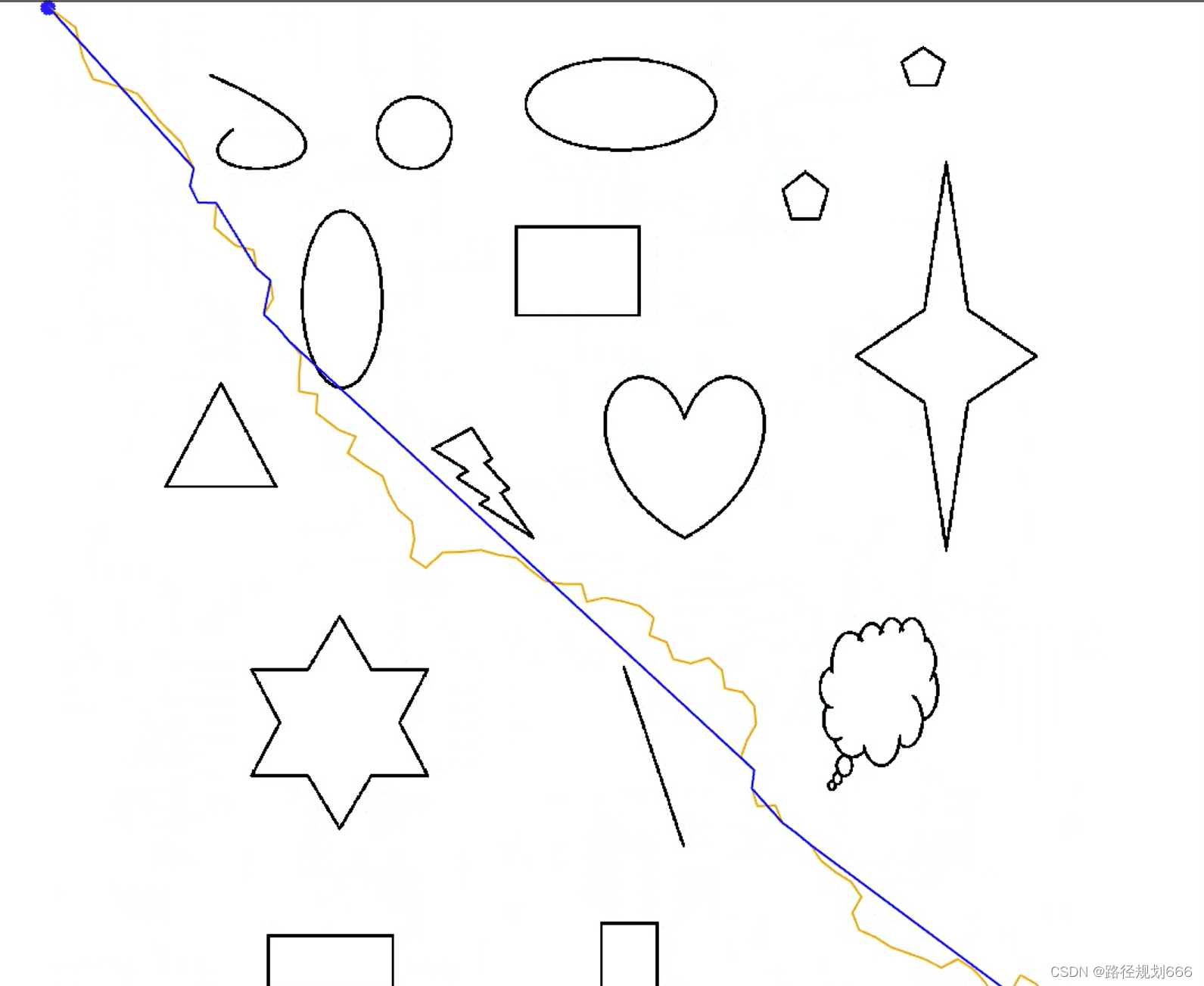
这段代码是一个路径优化函数,输入参数为地图和原始路径,输出为优化后的路径。代码首先初始化一些变量,然后遍历原始路径中的每个节点,计算当前节点与上一个节点之间的距离。如果距离大于0或者大于上一个节点与上一个节点的距离,则将当前节点作为一个新的路径节点。然后判断新的路径节点是否与前一个路径节点之间存在障碍物,如果存在障碍物,则将前一个路径节点作为优化后的路径节点。最终返回优化后的路径。
function path_opt = optimization(map,path)
k = 0;
l_p = length(path(:,1)) ;
path_opt = [path(1,1),path(1,2)] ;
path_tem = [path(1,1),path(1,2)] ;
dis_tem = zeros(1,l_p) ;
for i = 2:l_p
nodes = [path(i,1),path(i,2)];
dis_tem(i) = pdist2(nodes,path_tem);
if dis_tem(i)> 0 || dis_tem(i)> dis_tem(i-1)
indx = i;
path_new = [path(indx,1) path(indx,2)];
else path_new = [];
end
if (~isempty(path_new))
if ~checkpath(path_tem,path_new,map)
path_tem = [path(indx-1,1) path(indx-1,2)];
path_opt = [path_opt; path_tem];
end
end
end
end下面是路径优化结果:
代码获取链接:https://item.taobao.com/item.htm?ft=t&id=789214070370

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)