【神经网络】基于连续Hopfield神经网络的旅行商问题优化算法研究
本文旨在探讨利用连续Hopfield神经网络(Continuous Hopfield Neural Network, CHNN)解决TSP问题的优化算法。CHNN是一种具有并行计算能力的神经网络模型,能够有效地搜索问题的可行解空间。本文将详细介绍CHNN的原理、算法步骤,并结合MATLAB代码进行深入分析,旨在为读者提供一个全面理解和应用CHNN解决TSP问题的实践指南。
一、前言
旅行商问题(Traveling Salesman Problem, TSP)是一个经典的组合优化问题,其目标是找到一条访问给定城市集合的最短路径,使得每个城市恰好被访问一次,并最终回到起点。TSP在物流、交通运输、电路设计等领域具有广泛的应用。由于TSP是一个NP-hard问题,传统的精确算法在求解大规模问题时面临计算复杂度过高的挑战。因此,研究高效的近似算法具有重要的理论意义和实际价值。
本文旨在探讨利用连续Hopfield神经网络(Continuous Hopfield Neural Network, CHNN)解决TSP问题的优化算法。CHNN是一种具有并行计算能力的神经网络模型,能够有效地搜索问题的可行解空间。本文将详细介绍CHNN的原理、算法步骤,并结合MATLAB代码进行深入分析,旨在为读者提供一个全面理解和应用CHNN解决TSP问题的实践指南。
二、技术与原理简介
1. 旅行商问题与Hopfield神经网络
1.1 旅行商问题(TSP)
TSP可以形式化地描述为:给定一个包含N个城市的集合,以及城市之间的距离矩阵D,其中D(i,j)表示城市i和城市j之间的距离。目标是找到一条访问所有城市且总距离最短的闭合路径。
TSP的数学模型可以表示为:
最小化:
约束条件:
![]()
其中,𝑥𝑖𝑗 表示城市i和城市j是否在路径中相邻,如果相邻则为1,否则为0。第一个约束条件保证每个城市只能被访问一次,第二个约束条件保证每个城市只能被离开一次。
1.2 Hopfield神经网络
Hopfield神经网络是一种循环神经网络,由一组相互连接的神经元组成。每个神经元的状态可以是激活(1)或抑制(0)。神经元之间的连接权重决定了它们之间的相互作用强度。Hopfield神经网络通过能量函数来描述网络的状态,网络的目标是找到使能量函数最小的状态。
Hopfield神经网络的能量函数可以表示为:
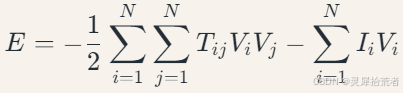
其中,𝑉𝑖 表示神经元i的状态,𝑇𝑖𝑗 表示神经元i和神经元j 之间的连接权重,𝐼𝑖 表示神经元i 的外部输入。
1.3 连续Hopfield神经网络(CHNN)
连续Hopfield神经网络是Hopfield神经网络的一种变体,其神经元状态可以取连续值,而不是离散的0或1。CHNN通常使用sigmoid函数作为激活函数,将神经元的输入映射到0到1之间的连续值。
CHNN的动态方程可以表示为:
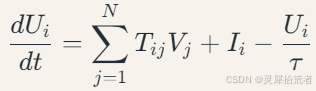
![]()
其中,𝑈𝑖 表示神经元i的输入,𝑉𝑖 表示神经元i的输出,𝑇𝑖𝑗 表示神经元i和神经元j 之间的连接权重,𝐼𝑖 表示神经元i 的外部输入,𝜏 表示时间常数,𝑔(𝑈𝑖) 表示激活函数。常用的激活函数是sigmoid函数:
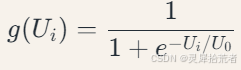
其中,𝑈0 是一个参数,控制sigmoid函数的陡峭程度。
2. 基于CHNN的TSP优化算法
2.1 CHNN解决TSP问题的思路
利用CHNN解决TSP问题的核心思想是将TSP的约束条件和目标函数转化为CHNN的能量函数。通过设计合适的连接权重和外部输入,使得CHNN的能量函数在对应于TSP最优解的状态下达到最小值。
具体来说,可以将CHNN的神经元组织成一个N×N的矩阵,其中N是城市的数量。神经元V(i,j)表示城市i 在路径中的第j 个位置。如果V(i,j) 的值接近1,则表示城市i 在路径中的第j 个位置;如果V(i,j) 的值接近0,则表示城市i不在路径中的第j 个位置。
2.2 能量函数设计
为了保证CHNN能够找到TSP的可行解,需要设计合适的能量函数,使其能够反映TSP的约束条件。常用的能量函数包括以下几项:
(1) 行约束项: 保证每个城市只能在路径中出现一次。
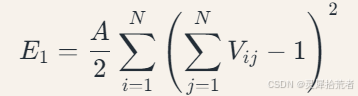
其中,A是一个常数,用于控制行约束项的权重。
(2) 列约束项: 保证路径中的每个位置只能有一个城市。
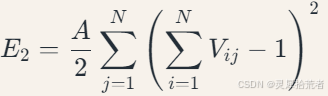
其中,A是一个常数,用于控制列约束项的权重。
(3) 距离约束项: 最小化路径的总距离。
其中,D是一个常数,用于控制距离约束项的权重,𝐷𝑖𝑘 表示城市i和城市k 之间的距离,𝑉𝑖,𝑁+1=𝑉𝑖,1。
总的能量函数为:
2.3 连接权重和外部输入设计
根据能量函数,可以推导出CHNN的连接权重和外部输入。
连接权重:
![]()
其中,𝛿𝑖𝑗 表示克罗内克函数,当i=j 时为1,否则为0。
外部输入:
![]()
2.4 算法步骤
基于CHNN的TSP优化算法的步骤如下:
- 初始化: 初始化CHNN的神经元状态U(i,j)和V(i,j)。通常将U(i,j)初始化为接近0的值,并加入小的随机扰动,以避免网络陷入局部最小值。
- 迭代: 根据CHNN的动态方程,迭代更新神经元状态U(i,j)和V(i,j)。
- 收敛判断: 判断网络是否收敛。常用的收敛判断条件是能量函数的变化小于一个阈值,或者达到最大迭代次数。
- 解码: 将CHNN的输出V(i,j)解码为TSP的路径。通常选择V(i,j)值最大的城市作为路径中的第j个位置。
- 路径有效性判断: 检查解码后的路径是否满足TSP的约束条件。如果路径无效,则重新初始化网络并重复迭代过程。
三、代码详解
本文的 MATLAB 代码主要分为以下几个部分:
1. 初始化
clear all
clc
global A D
load city_location
distance = dist(citys,citys');
N = size(citys,1);
A = 200;
D = 100;
U0 = 0.1;
step = 0.0001;
delta = 2 * rand(N,N) - 1;
U = U0 * log(N-1) + delta;
V = (1 + tansig(U/U0))/2;
iter_num = 10000;
E = zeros(1,iter_num);
说明:
-
这段代码首先清空环境变量和命令行窗口,然后定义全局变量A和D,用于控制能量函数中行约束项和距离约束项的权重。接着,导入城市位置数据,并计算城市之间的距离矩阵。然后,初始化CHNN的参数,包括城市数量N,权重A和D,sigmoid函数的参数U0,迭代步长step,神经元状态U和V,最大迭代次数iter_num,以及能量函数E。
-
clear all:清除工作区的所有变量。 -
clc:清除命令行窗口的内容。 -
global A D:声明A和D为全局变量,可以在不同的函数中使用。 -
load city_location:加载包含城市坐标的数据,假设数据保存在名为city_location.mat的文件中,文件中包含一个名为citys的变量,citys是一个N×2的矩阵,每一行代表一个城市的坐标。 -
distance = dist(citys,citys'):计算城市之间的距离矩阵。dist是MATLAB的距离计算函数,citys'是citys的转置。 -
N = size(citys,1):获取城市的数量。 -
A = 200; D = 100;:设置能量函数中约束项和距离项的权重。这些参数需要根据具体问题进行调整。 -
U0 = 0.1;:设置sigmoid函数的参数,控制sigmoid函数的陡峭程度。 -
step = 0.0001;:设置迭代步长,控制神经元状态更新的速度。 -
delta = 2 * rand(N,N) - 1;:生成一个N×N的随机矩阵,用于初始化神经元状态U,加入小的随机扰动,以避免网络陷入局部最小值。 -
U = U0 * log(N-1) + delta;:初始化神经元状态U。U0 * log(N-1)是一个经验值,用于设置U的初始值。 -
V = (1 + tansig(U/U0))/2;:计算神经元状态V,其中tansig是双曲正切函数,将U映射到-1到1之间,然后通过(1 + tansig(U/U0))/2将其映射到0到1之间。 -
iter_num = 10000;:设置最大迭代次数。 -
E = zeros(1,iter_num);:初始化能量函数E,用于记录每次迭代的能量函数值。
2. 寻优迭代
for k = 1:iter_num
% 动态方程计算
dU = diff_u(V,distance);
% 输入神经元状态更新
U = U + dU*step;
% 输出神经元状态更新
V = (1 + tansig(U/U0))/2;
% 能量函数计算
e = energy(V,distance);
E(k) = e;
end
说明:
-
这段代码是CHNN的核心部分,它根据CHNN的动态方程,迭代更新神经元状态U和V,并计算能量函数。
-
for k = 1:iter_num:循环迭代,直到达到最大迭代次数。 -
dU = diff_u(V,distance);:计算神经元状态U的变化量,调用自定义函数diff_u。 -
U = U + dU*step;:更新神经元状态U,其中step是迭代步长。 -
V = (1 + tansig(U/U0))/2;:更新神经元状态V。 -
e = energy(V,distance);:计算能量函数,调用自定义函数energy。 -
E(k) = e;:记录每次迭代的能量函数值。
3. 路径有效性判断
[rows,cols] = size(V);
V1 = zeros(rows,cols);
[V_max,V_ind] = max(V);
for j = 1:cols
V1(V_ind(j),j) = 1;
end
C = sum(V1,1);
R = sum(V1,2);
flag = isequal(C,ones(1,N)) & isequal(R',ones(1,N));
说明:
-
这段代码判断解码后的路径是否满足TSP的约束条件。
-
[rows,cols] = size(V);:获取神经元状态V的行数和列数。 -
V1 = zeros(rows,cols);:初始化二值矩阵V1。 -
[V_max,V_ind] = max(V);:找到每一列中V值最大的神经元的索引。 -
for j = 1:cols:循环遍历每一列。 -
V1(V_ind(j),j) = 1;:将每一列中V值最大的神经元对应的V1值设置为1,其余设置为0。 -
C = sum(V1,1);:计算V1的列和,表示每个位置上是否有且只有一个城市。 -
R = sum(V1,2);:计算V1的行和,表示每个城市是否只出现一次。 -
flag = isequal(C,ones(1,N)) & isequal(R',ones(1,N));:判断解码后的路径是否满足TSP的约束条件,即每个城市只能被访问一次,且路径中的每个位置只能有一个城市。
4. 结果显示
if flag == 1
% 计算初始路径长度
sort_rand = randperm(N);
citys_rand = citys(sort_rand,:);
Length_init = dist(citys_rand(1,:),citys_rand(end,:)');
for i = 2:size(citys_rand,1)
Length_init = Length_init+dist(citys_rand(i-1,:),citys_rand(i,:)');
end
% 绘制初始路径
figure(1)
plot([citys_rand(:,1);citys_rand(1,1)],[citys_rand(:,2);citys_rand(1,2)],'o-')
for i = 1:length(citys)
text(citys(i,1),citys(i,2),[' ' num2str(i)])
end
text(citys_rand(1,1),citys_rand(1,2),[' 起点' ])
text(citys_rand(end,1),citys_rand(end,2),[' 终点' ])
title(['优化前路径(长度:' num2str(Length_init) ')'])
axis([0 1 0 1])
grid on
xlabel('城市位置横坐标')
ylabel('城市位置纵坐标')
% 计算最优路径长度
[V1_max,V1_ind] = max(V1);
citys_end = citys(V1_ind,:);
Length_end = dist(citys_end(1,:),citys_end(end,:)');
for i = 2:size(citys_end,1)
Length_end = Length_end+dist(citys_end(i-1,:),citys_end(i,:)');
end
disp('最优路径矩阵');V1
% 绘制最优路径
figure(2)
plot([citys_end(:,1);citys_end(1,1)],...
[citys_end(:,2);citys_end(1,2)],'o-')
for i = 1:length(citys)
text(citys(i,1),citys(i,2),[' ' num2str(i)])
end
text(citys_end(1,1),citys_end(1,2),[' 起点' ])
text(citys_end(end,1),citys_end(end,2),[' 终点' ])
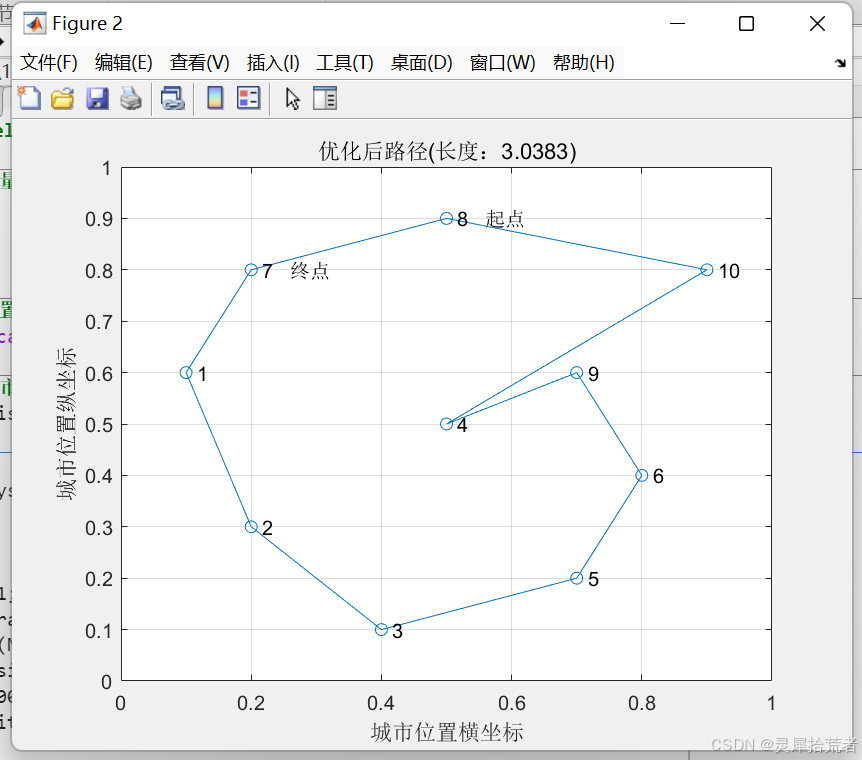
title(['优化后路径(长度:' num2str(Length_end) ')'])
axis([0 1 0 1])
grid on
xlabel('城市位置横坐标')
ylabel('城市位置纵坐标')
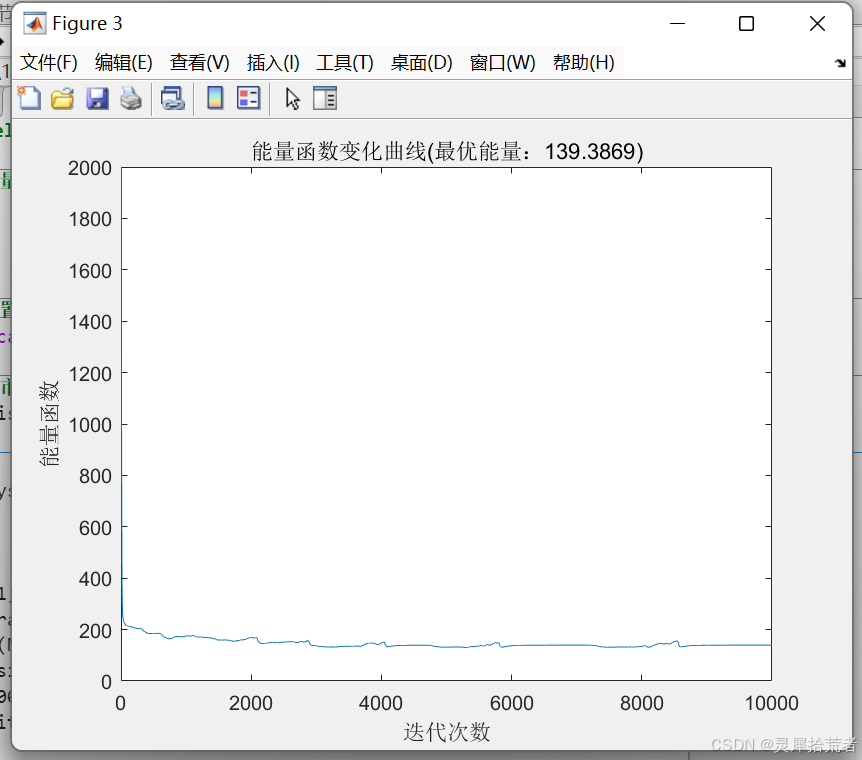
% 绘制能量函数变化曲线
figure(3)
plot(1:iter_num,E);
ylim([0 2000])
title(['能量函数变化曲线(最优能量:' num2str(E(end)) ')']);
xlabel('迭代次数');
ylabel('能量函数');
else
disp('寻优路径无效');
end
说明:
-
这段代码首先判断路径是否有效。如果路径有效,则计算初始路径长度和最优路径长度,并绘制初始路径、最优路径和能量函数变化曲线。
-
if flag == 1:判断路径是否有效。 -
sort_rand = randperm(N);:生成一个随机排列的城市索引。 -
citys_rand = citys(sort_rand,:):根据随机索引排列城市坐标,用于计算初始路径长度。 -
Length_init = dist(citys_rand(1,:),citys_rand(end,:)');:计算初始路径长度,从第一个城市到最后一个城市。 -
for i = 2:size(citys_rand,1):循环遍历所有城市。 -
Length_init = Length_init+dist(citys_rand(i-1,:),citys_rand(i,:)');:计算初始路径长度,从上一个城市到当前城市。 -
figure(1):创建一个新的图形窗口。 -
plot([citys_rand(:,1);citys_rand(1,1)],[citys_rand(:,2);citys_rand(1,2)],'o-'):绘制初始路径。 -
for i = 1:length(citys):循环遍历所有城市。 -
text(citys(i,1),citys(i,2),[' ' num2str(i)]):在每个城市的位置上添加城市编号。 -
text(citys_rand(1,1),citys_rand(1,2),[' 起点' ]):在起点位置上添加文本。 -
text(citys_rand(end,1),citys_rand(end,2),[' 终点' ]):在终点位置上添加文本。 -
title(['优化前路径(长度:' num2str(Length_init) ')']):设置图形标题。 -
axis([0 1 0 1]):设置坐标轴范围。 -
grid on:显示网格线。 -
xlabel('城市位置横坐标'):设置x轴标签。 -
ylabel('城市位置纵坐标'):设置y轴标签。 -
[V1_max,V1_ind] = max(V1);:找到每一列中V1值最大的神经元的索引,用于解码最优路径。 -
citys_end = citys(V1_ind,:):根据索引获取最优路径的城市坐标。 -
Length_end = dist(citys_end(1,:),citys_end(end,:)');:计算最优路径长度。 -
for i = 2:size(citys_end,1):循环遍历所有城市。 -
Length_end = Length_end+dist(citys_end(i-1,:),citys_end(i,:)');:计算最优路径长度。 -
disp('最优路径矩阵');V1:显示最优路径矩阵。 -
figure(2):创建一个新的图形窗口。 -
plot([citys_end(:,1);citys_end(1,1)],[citys_end(:,2);citys_end(1,2)],'o-'):绘制最优路径。 -
for i = 1:length(citys):循环遍历所有城市。 -
text(citys(i,1),citys(i,2),[' ' num2str(i)]):在每个城市的位置上添加城市编号。 -
text(citys_end(1,1),citys_end(1,2),[' 起点' ]):在起点位置上添加文本。 -
text(citys_end(end,1),citys_end(end,2),[' 终点' ]):在终点位置上添加文本。 -
title(['优化后路径(长度:' num2str(Length_end) ')']):设置图形标题。 -
axis([0 1 0 1]):设置坐标轴范围。 -
grid on:显示网格线。 -
xlabel('城市位置横坐标'):设置x轴标签。 -
ylabel('城市位置纵坐标'):设置y轴标签。 -
figure(3):创建一个新的图形窗口。 -
plot(1:iter_num,E);:绘制能量函数变化曲线。 -
ylim([0 2000]):设置y轴范围。 -
title(['能量函数变化曲线(最优能量:' num2str(E(end)) ')']):设置图形标题。 -
xlabel('迭代次数'):设置x轴标签。 -
ylabel('能量函数'):设置y轴标签。 -
else:如果路径无效。 -
disp('寻优路径无效');:显示“寻优路径无效”。
5. 辅助函数
% % % % % 计算能量函数
function E=energy(V,d)
global A D
n=size(V,1);
sum_x=sumsqr(sum(V,2)-1);
sum_i=sumsqr(sum(V,1)-1);
V_temp=V(:,2:n);
V_temp=[V_temp V(:,1)];
sum_d=d*V_temp;
sum_d=sum(sum(V.*sum_d));
E=0.5*(A*sum_x+A*sum_i+D*sum_d);
end
% % % % 计算du
function du=diff_u(V,d)
global A D
n=size(V,1);
sum_x=repmat(sum(V,2)-1,1,n);
sum_i=repmat(sum(V,1)-1,n,1);
V_temp=V(:,2:n);
V_temp=[V_temp V(:,1)];
sum_d=d*V_temp;
du=-A*sum_x-A*sum_i-D*sum_d;
end
说明:
-
energy(V,d)函数: 计算能量函数。global A D:声明A和D为全局变量。n=size(V,1);:获取城市数量。sum_x=sumsqr(sum(V,2)-1);:计算行约束项。sum_i=sumsqr(sum(V,1)-1);:计算列约束项。V_temp=V(:,2:n);:将V矩阵的列向左移动一位,用于计算距离约束项。V_temp=[V_temp V(:,1)];:将V矩阵的第一列添加到V_temp的最后一列。sum_d=d*V_temp;:计算距离约束项。sum_d=sum(sum(V.*sum_d));:计算距离约束项。E=0.5*(A*sum_x+A*sum_i+D*sum_d);:计算能量函数。
-
diff_u(V,d)函数: 计算神经元状态U的变化量。global A D:声明A和D为全局变量。n=size(V,1);:获取城市数量。sum_x=repmat(sum(V,2)-1,1,n);:计算行约束项。sum_i=repmat(sum(V,1)-1,n,1);:计算列约束项。V_temp=V(:,2:n);:将V矩阵的列向左移动一位,用于计算距离约束项。V_temp=[V_temp V(:,1)];:将V矩阵的第一列添加到V_temp的最后一列。sum_d=d*V_temp;:计算距离约束项。du=-A*sum_x-A*sum_i-D*sum_d;:计算神经元状态U的变化量。
6. 完整代码
%% 连续Hopfield神经网络的优化—旅行商问题优化计算
%% 清空环境变量、定义全局变量
clear all
clc
global A D
%% 导入城市位置
load city_location
%% 计算相互城市间距离
distance = dist(citys,citys');
%% 初始化网络
N = size(citys,1);
A = 200;
D = 100;
U0 = 0.1;
step = 0.0001;
delta = 2 * rand(N,N) - 1;
U = U0 * log(N-1) + delta;
V = (1 + tansig(U/U0))/2;
iter_num = 10000;
E = zeros(1,iter_num);
%% 寻优迭代
for k = 1:iter_num
% 动态方程计算
dU = diff_u(V,distance);
% 输入神经元状态更新
U = U + dU*step;
% 输出神经元状态更新
V = (1 + tansig(U/U0))/2;
% 能量函数计算
e = energy(V,distance);
E(k) = e;
end
%% 判断路径有效性
[rows,cols] = size(V);
V1 = zeros(rows,cols);
[V_max,V_ind] = max(V);
for j = 1:cols
V1(V_ind(j),j) = 1;
end
C = sum(V1,1);
R = sum(V1,2);
flag = isequal(C,ones(1,N)) & isequal(R',ones(1,N));
%% 结果显示
if flag == 1
% 计算初始路径长度
sort_rand = randperm(N);
citys_rand = citys(sort_rand,:);
Length_init = dist(citys_rand(1,:),citys_rand(end,:)');
for i = 2:size(citys_rand,1)
Length_init = Length_init+dist(citys_rand(i-1,:),citys_rand(i,:)');
end
% 绘制初始路径
figure(1)
plot([citys_rand(:,1);citys_rand(1,1)],[citys_rand(:,2);citys_rand(1,2)],'o-')
for i = 1:length(citys)
text(citys(i,1),citys(i,2),[' ' num2str(i)])
end
text(citys_rand(1,1),citys_rand(1,2),[' 起点' ])
text(citys_rand(end,1),citys_rand(end,2),[' 终点' ])
title(['优化前路径(长度:' num2str(Length_init) ')'])
axis([0 1 0 1])
grid on
xlabel('城市位置横坐标')
ylabel('城市位置纵坐标')
% 计算最优路径长度
[V1_max,V1_ind] = max(V1);
citys_end = citys(V1_ind,:);
Length_end = dist(citys_end(1,:),citys_end(end,:)');
for i = 2:size(citys_end,1)
Length_end = Length_end+dist(citys_end(i-1,:),citys_end(i,:)');
end
disp('最优路径矩阵');V1
% 绘制最优路径
figure(2)
plot([citys_end(:,1);citys_end(1,1)],...
[citys_end(:,2);citys_end(1,2)],'o-')
for i = 1:length(citys)
text(citys(i,1),citys(i,2),[' ' num2str(i)])
end
text(citys_end(1,1),citys_end(1,2),[' 起点' ])
text(citys_end(end,1),citys_end(end,2),[' 终点' ])
title(['优化后路径(长度:' num2str(Length_end) ')'])
axis([0 1 0 1])
grid on
xlabel('城市位置横坐标')
ylabel('城市位置纵坐标')
% 绘制能量函数变化曲线
figure(3)
plot(1:iter_num,E);
ylim([0 2000])
title(['能量函数变化曲线(最优能量:' num2str(E(end)) ')']);
xlabel('迭代次数');
ylabel('能量函数');
else
disp('寻优路径无效');
end
% % % % % 计算能量函数
function E=energy(V,d)
global A D
n=size(V,1);
sum_x=sumsqr(sum(V,2)-1);
sum_i=sumsqr(sum(V,1)-1);
V_temp=V(:,2:n);
V_temp=[V_temp V(:,1)];
sum_d=d*V_temp;
sum_d=sum(sum(V.*sum_d));
E=0.5*(A*sum_x+A*sum_i+D*sum_d);
end
% % % % 计算du
function du=diff_u(V,d)
global A D
n=size(V,1);
sum_x=repmat(sum(V,2)-1,1,n);
sum_i=repmat(sum(V,1)-1,n,1);
V_temp=V(:,2:n);
V_temp=[V_temp V(:,1)];
sum_d=d*V_temp;
du=-A*sum_x-A*sum_i-D*sum_d;
end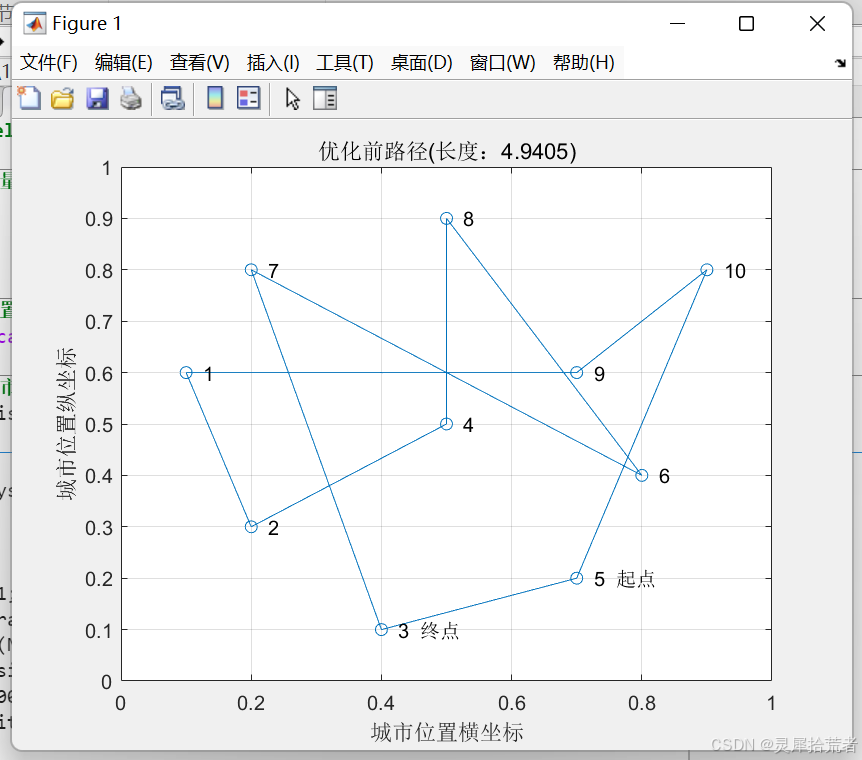
四、总结与思考
本文详细介绍了基于连续Hopfield神经网络的旅行商问题优化算法。通过设计合适的能量函数和动态方程,CHNN能够有效地搜索TSP的可行解空间,并找到近似最优解。MATLAB代码的实现也为读者提供了一个实践指南。
然而,CHNN在解决TSP问题时也存在一些局限性。例如,CHNN的参数需要仔细调整,才能获得较好的性能。此外,CHNN容易陷入局部最小值,导致无法找到全局最优解。
CHNN的局限性与改进方向:
- 参数敏感性: CHNN的性能高度依赖于参数A、D和U0的选择。不同的参数组合可能导致算法收敛到不同的局部最小值,甚至无法收敛。因此,需要进行大量的实验才能找到合适的参数。
【作者声明】
本文内容基于作者对 MATLAB 连续Hopfield神经网络(CHNN)优化旅行商问题(TSP)实现过程的实验与总结,所有数据和代码均为原创。文章中的观点仅代表个人见解,供读者参考交流。若有任何问题或建议,欢迎在评论区留言讨论,共同促进技术进步。
【关注我们】
如果您对神经网络、群智能算法及人工智能技术感兴趣,请关注我们的公众号【灵犀拾荒者】,获取更多前沿技术文章、实战案例及技术分享!欢迎点赞、收藏并转发,与更多朋友一起探讨与交流!点赞+收藏+关注,后台留言关键词【免费资料】可获免费资源及相关数据集。


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 15
15 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)