毕业设计:基于计算机视觉的街景交通标志识别与分类
交通标志识别系统,旨在实现对各类交通标志的自动检测与分类。通过构建包含多种交通标志样本的图像数据集,结合卷积神经网络(CNN)进行模型训练,系统能够高效识别不同类型的交通标志。对于计算机专业、人工智能专业、大数据专业、信息安全专业、软件工程专业的毕业生而言,不论是对于深度学习技术感兴趣的同学,还是希望探索机器学习、算法或人工智能的领域的同学,都能为您提供丰富的选题资源和灵感。
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
大家好,这里是海浪学长计算机毕设专题,本次分享的课题是
🎯基于计算机视觉的街景交通标志识别与分类
项目背景
交通标志是道路交通管理的重要组成部分,能够有效指导驾驶员的行为,确保交通安全。然而,随着交通环境的复杂化,传统的交通标志识别方法面临着识别速度慢、准确率低等问题。利用深度学习和计算机视觉技术开发交通标志识别系统,可以实现对交通标志的快速、准确识别,为智能交通系统的发展提供支持。
数据集
图像采集采用自主拍摄和互联网采集。在不同城市和街道环境中进行,捕捉各种真实场景下的交通标志,确保数据的多样性与代表性。通过访问公开的图片数据库和交通标志相关网站,收集大量的标志图像,以补充自主拍摄的不足,丰富数据集的内容。

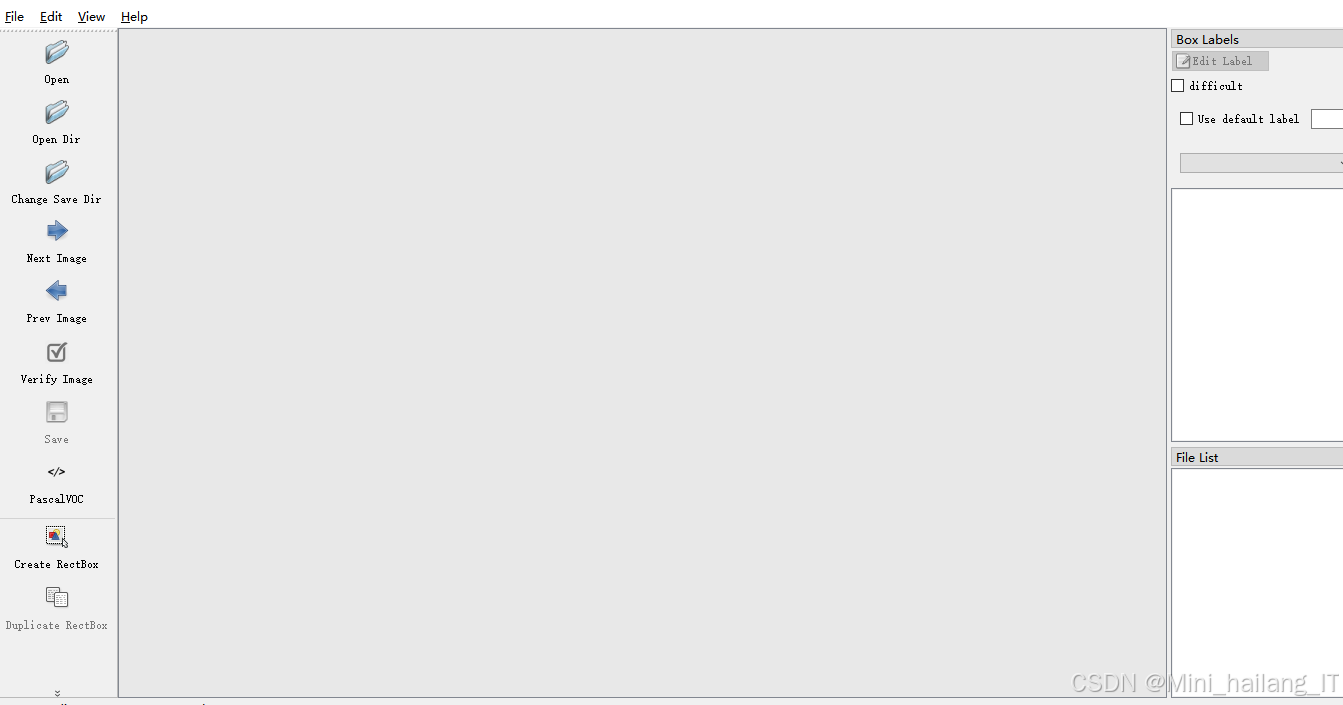
数据标注使用专业工具如LabelImg进行,通过绘制边界框准确标识每个交通标志的位置,并为其赋予相应的类别标签,如“停车标志”或“限速标志”。这一过程确保数据的准确性和一致性,直接影响模型的训练效果和识别能力。标注完成后,生成的标注文件以XML或JSON格式保存,为后续的数据处理和模型训练奠定了坚实的基础。
在数据集划分阶段,将数据分为训练集、验证集和测试集,以便于模型的有效评估和泛化能力。进行数据扩展,通过旋转、翻转、缩放等图像变换技术,增加数据的多样性。这不仅提升了模型的鲁棒性,还帮助缓解了模型过拟合的问题。
设计思路
卷积神经网络(CNN)是人工智能领域的研究热点,受到神经元结构的启发,模仿生物神经细胞的连接方式。其结构主要包括卷积层、池化层、全连接层和输出层。网络通过前向传播生成输出,输出的预测值与真实值之间的误差通过反向传播进行参数更新,从而优化网络结构。
在卷积层中,每个神经元仅与相邻层的神经元进行局部连接,对输入图像进行特征提取,消除噪音,并对同一特征图的神经元共享参数。每个卷积核共享相同的参数。池化层则通过下采样降低计算量,去除无效信息。反向传播优化训练过程,首先计算预测值与真实值之间的误差,利用损失函数(通常为均方误差)来实现。
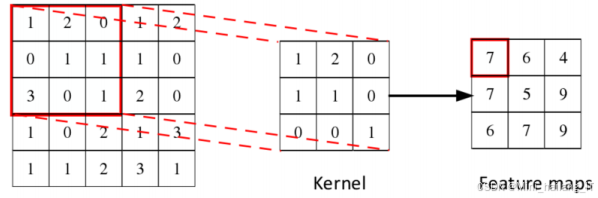
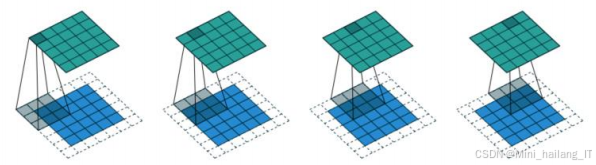
反向传播过程的方向与前向传播相反,从输出层到输入层,根据梯度的大小和方向更新卷积层的参数。图像区域经过划分后进行卷积运算,滑动计算时对应位置的像素值与卷积核进行内积,以提取图像特征。卷积操作的核心思想包括局部连接和权值共享,局部连接减少了参数,降低了过拟合风险,权值共享则加快了学习速度。
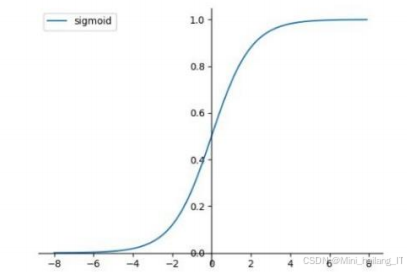
激活层的作用是将线性输入映射为非线性输出。没有激活层,神经网络无法模拟非线性数据分类。激活层通常位于卷积层之后,常见的激活函数包括sigmoid、tanh和ReLU。通过激活函数,卷积神经网络具备了多层级的非线性映射能力。
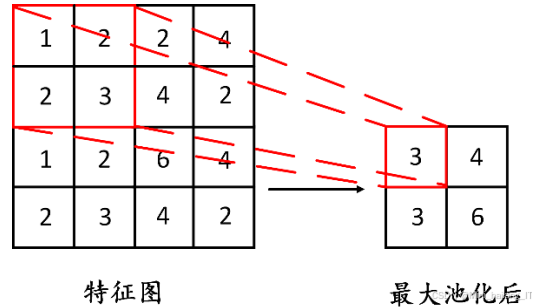
池化层通常在相邻的卷积层中加入,主要用于对输入数据进行降采样,保留重要特征信息,防止模型过拟合。池化层不改变通道数,常见的类型包括最大池化和平均池化。最大池化选择池化窗口中的最大值,保留显著特征,平均池化则计算窗口内的平均值以保留较为完整的信息。池化的参数设置包括池化窗口大小、步长和填充,这些都会影响池化效果。卷积神经网络的最后通常添加一个或多个全连接层,每个神经元与前一层的所有神经元相连,用于区分卷积或池化后的类别信息。全连接层提取特征后得到特征向量,通过处理这些向量实现分类结果。
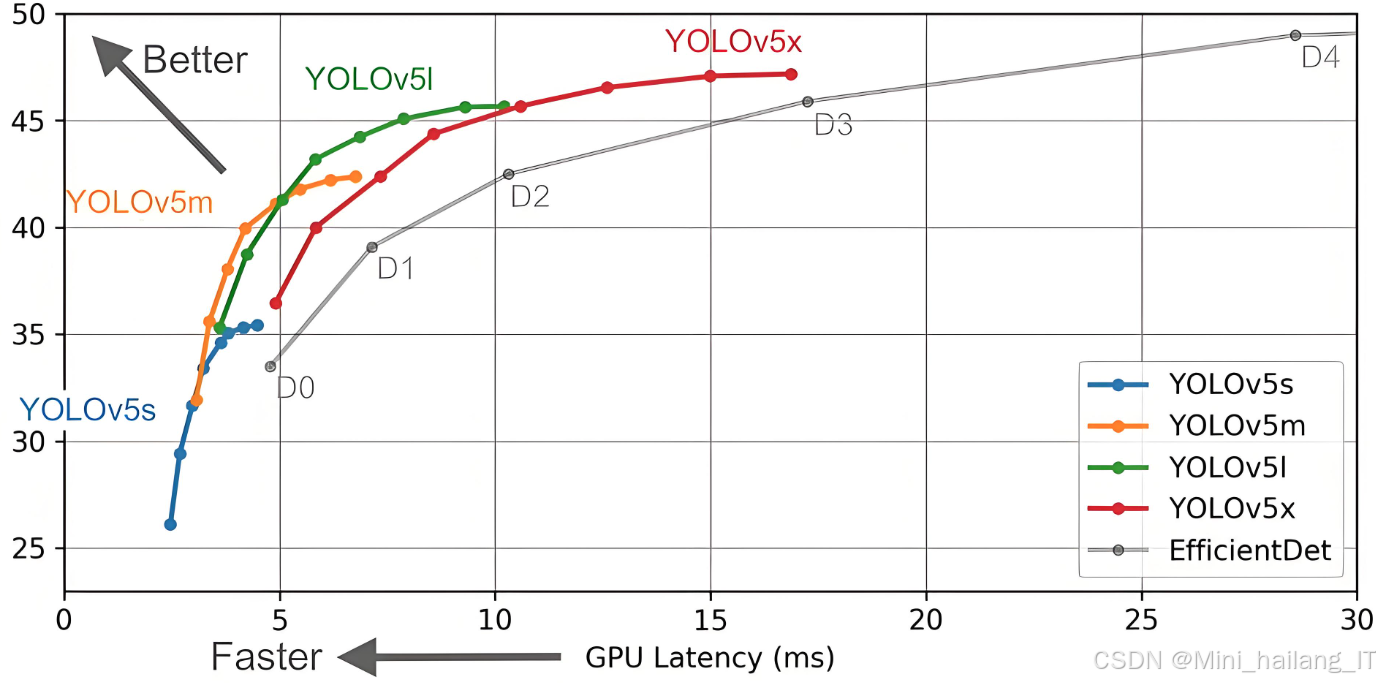
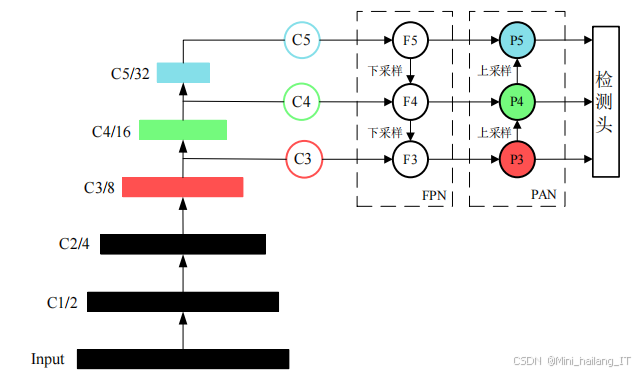
YOLOv5被广泛应用于目标检测领域,具有灵活便捷的部署特点。其模型结构主要分为输入端、骨干网络、颈部和预测层。输入端负责接收RGB三通道图像,并进行Mosaic数据增强、自适应锚框计算以及图像分辨率处理。骨干网络通过不同大小的卷积提取多尺度的图像特征,去除无效特征,而颈部网络则将不同尺度的有效特征进行拼接,为后续的预测层做好准备,最终在预测层进行目标的预测。
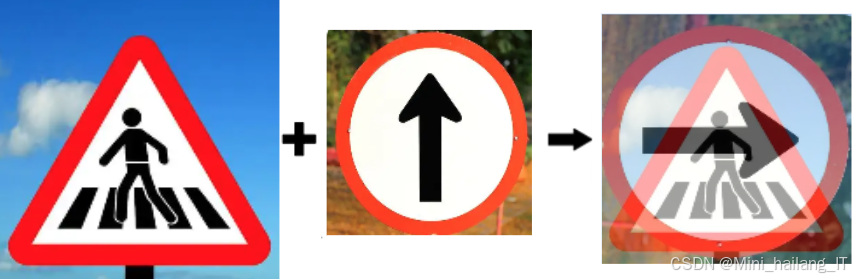
输入端不仅负责输入图像,还实施Mosaic数据增强技术,通过将不同图像拼接在一起并进行放大、缩小、旋转等操作,丰富检测目标的图像。这种增强方法有效提升了模型对不同场景和目标的识别能力。此外,自适应锚框计算在每次训练开始前,根据不同数据集计算相应的锚框,确保模型能够更好地适应特定任务。
骨干网络主要由Focus模块、CBS模块、Bottleneck模块和SPP模块等组成。Focus模块通过切片操作减少计算量和参数量,以保留图像信息。具体而言,Focus模块在输入图像中每隔固定像素取一个值,从而缩小图像尺寸,同时增加维度。经过Slice与Concat操作后,输出特征映射,随后通过卷积层进一步提取特征。C3模块通过CBS和多个Bottleneck模块计算,并结合卷积计算,获得残差特征和细微特征,从而避免网络退化。
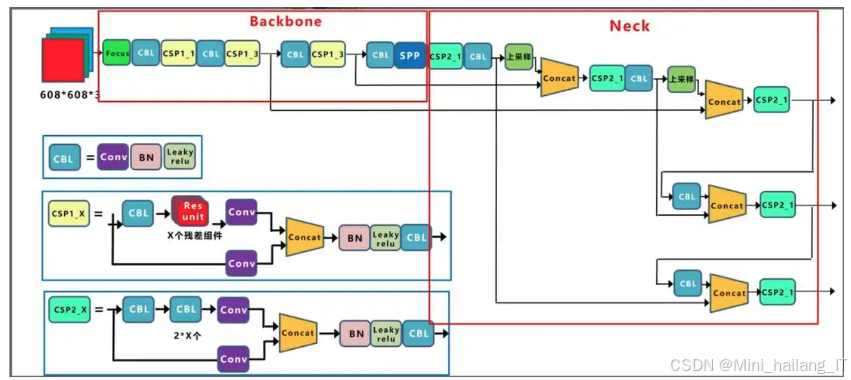
颈部网络包含路径聚合网络(PAN)和特征金字塔网络(FPN)。FPN层通过自上而下的特征融合,将高层语义信息传递并进行预测。然而,随着特征层级的增加,高层特征的抽象性使得底层目标信息变得模糊。PAN层引入自下而上的通路,增强底层语义信息,特别是位置信息,从而提高检测精度。这样的特征融合策略有效提升了模型对目标类别和位置信息的识别能力。
YOLOv5的损失函数由边界框损失、置信度损失和分类损失组成,其中采用CIOU作为边界框回归的损失函数。损失函数的值由模型的预测值与真实值决定,直接影响模型的训练效果,值越小代表拟合程度越高。
数据准备包括数据集的收集、清洗和标注。收集的数据应包括多样化的交通标志图像,标注工具会为每个图像生成相应的标签文件。数据清洗过程涉及移除模糊或低质量的图像,确保只有清晰且具有代表性的样本被用于训练。通过对训练数据进行旋转、翻转、缩放、色彩调整等操作,可以生成新的训练样本,增加数据的多样性。这一过程可以有效降低过拟合风险,使模型能够更好地适应不同的场景和光照条件。
# 示例代码:数据增强
from keras.preprocessing.image import ImageDataGenerator
datagen = ImageDataGenerator(
rotation_range=20,
width_shift_range=0.2,
height_shift_range=0.2,
shear_range=0.2,
zoom_range=0.2,
horizontal_flip=True,
fill_mode='nearest'
)
# 假设有一张图片需要增强
image = cv2.imread('path/to/image.jpg')
image = image.reshape((1,) + image.shape) # 调整为符合datagen的输入形状
# 生成增强样本
for batch in datagen.flow(image, batch_size=1):
# 保存或使用增强样本
break选择合适的深度学习框架并设计模型架构。常见的选择包括卷积神经网络,可根据需求选择预训练模型,如YOLO、MobileNet等,或从头开始构建模型。使用YOLOv5进行模型训练时,首先需要安装YOLOv5的依赖包并下载YOLOv5代码库。然后,配置训练参数,指定训练集和验证集的路径,以及超参数,如学习率和批次大小。通过调用YOLOv5的训练函数,开始训练过程。设计时需考虑层的数量、每层的神经元数、激活函数等参数。将准备好的数据集分为训练集和验证集,使用训练集对模型进行训练,并利用验证集监控模型性能。通过调整超参数来优化训练过程,并使用回调函数防止过拟合。
# 示例代码:训练模型
from keras.callbacks import EarlyStopping
early_stopping = EarlyStopping(monitor='val_loss', patience=3)
model.fit(training_data, training_labels,
validation_data=(validation_data, validation_labels),
epochs=50,
batch_size=32,
callbacks=[early_stopping])模型评估使用独立的测试集来检验模型的性能。可以使用准确率、召回率、F1-score等指标评估模型效果。此外,还可以通过可视化工具(如混淆矩阵)分析模型在不同类别上的表现。将训练好的模型进行部署,使其能够在实际应用中进行交通标志识别。这一过程可以通过将模型导出为适合的格式,并在服务器或边缘设备上进行部署,以便实时处理图像数据。
# 示例代码:评估模型
from sklearn.metrics import classification_report, confusion_matrix
test_loss, test_accuracy = model.evaluate(test_data, test_labels)
predictions = model.predict(test_data)
print(classification_report(test_labels, predictions.argmax(axis=1)))
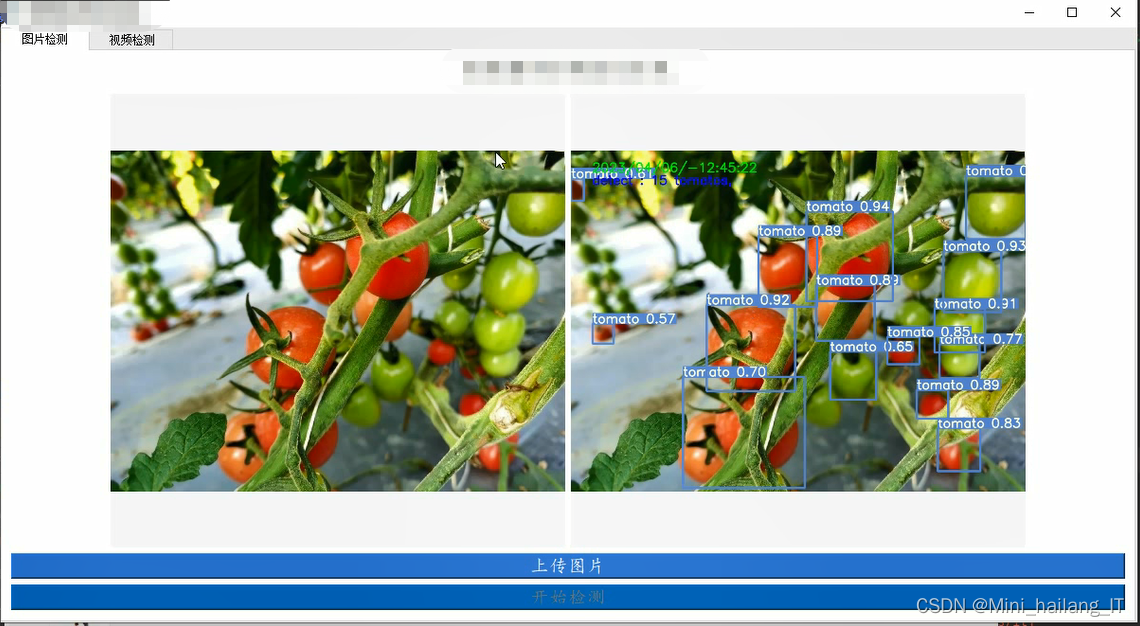
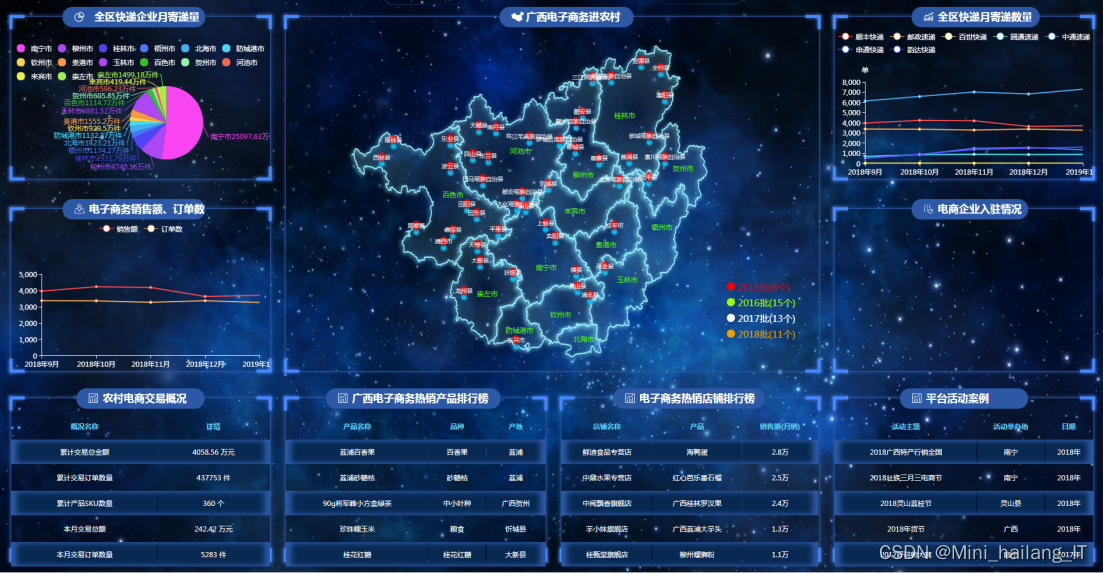
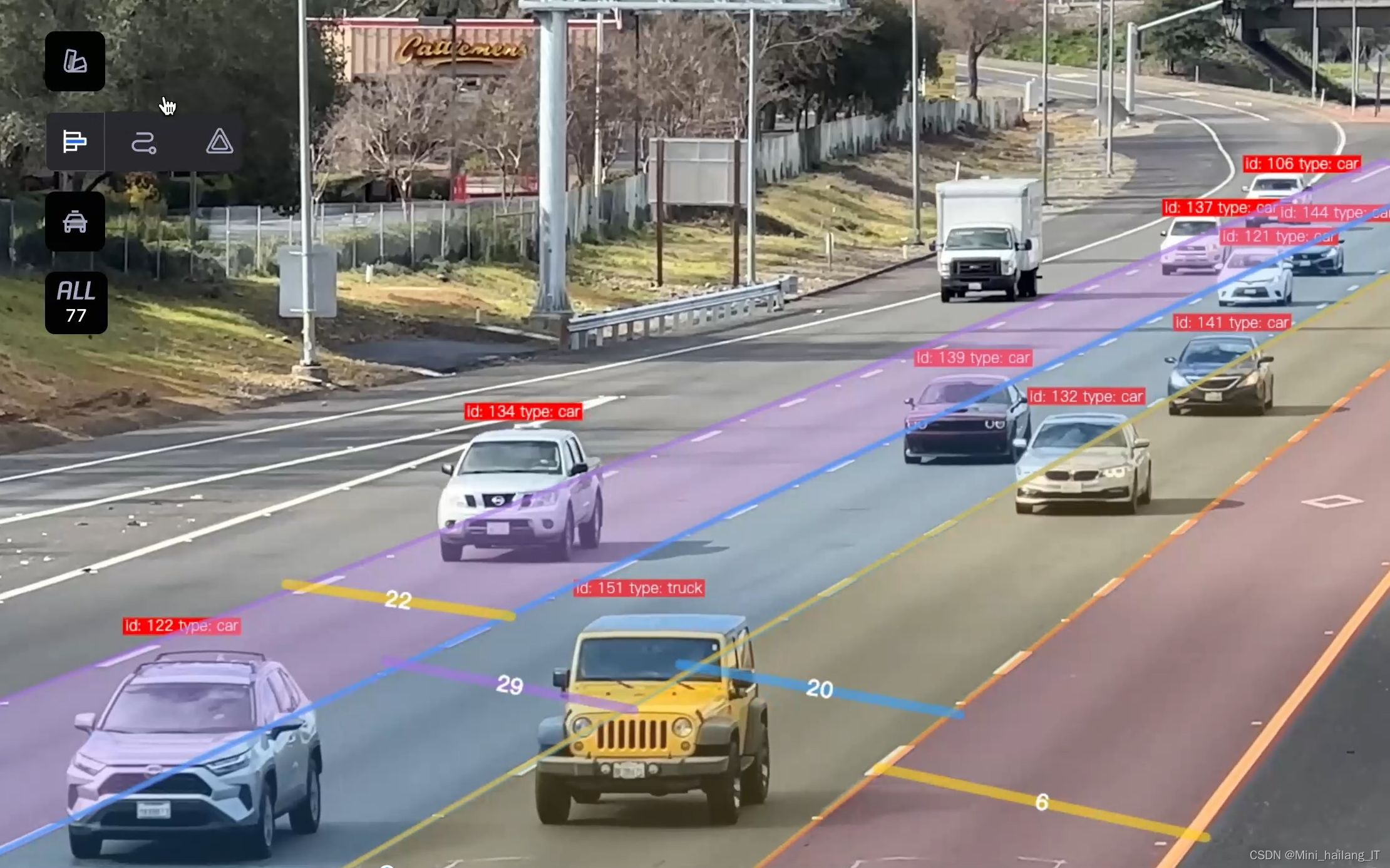
print(confusion_matrix(test_labels, predictions.argmax(axis=1)))海浪学长项目示例:



更多帮助

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 26
26 0
0- 0



 已为社区贡献151条内容
已为社区贡献151条内容

所有评论(0)