如何使用docker配置ros-noetic环境并使用rviz,gazebo
·
参考链接:【Ubuntu】Docker中配置ROS并可视化Rviz及Gazebo_docker ros-CSDN博客
前言:
其实这个东西是相当必要的,因为我们有时候需要在一台电脑上跑好几个项目,每个项目都有不同的依赖,这些依赖冲突搞得人头皮发麻,与其整理乱糟糟的依赖关系,不如直接给每个项目一个环境。
一、详细步骤
1.拉取镜像
sudo docker pull osrf/ros:noetic-desktop-full

2.允许本地机器上的用户或进程连接到 X server
sudo xhost +local:
![]()
不允许就是sudo xhost -local
如果报错
那就
xhost +local:
3.构建容器
# volume=/tmp/.X11-unix:/tmp/.X11-unix 挂载宿主机和docker文件互传
# --device=/dev/dri:/dev/dri 有了这个才能够显示,可能让docker使用显卡
docker run -it \
--volume=/tmp/.X11-unix:/tmp/.X11-unix \
--device=/dev/dri:/dev/dri \
--device=/dev/snd \
--env="DISPLAY=$DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--name=ros_noetic_test_new \
osrf/ros:noetic-desktop-full
docker run -it --volume=/tmp/.X11-unix:/tmp/.X11-unix --device=/dev/dri:/dev/dri --device=/dev/snd --env="DISPLAY=$DISPLAY" --env="QT_X11_NO_MITSHM=1" --name=ros_noetic_turtlebot3 osrf/ros:noetic-desktop-full4.显示rviz和gazebo
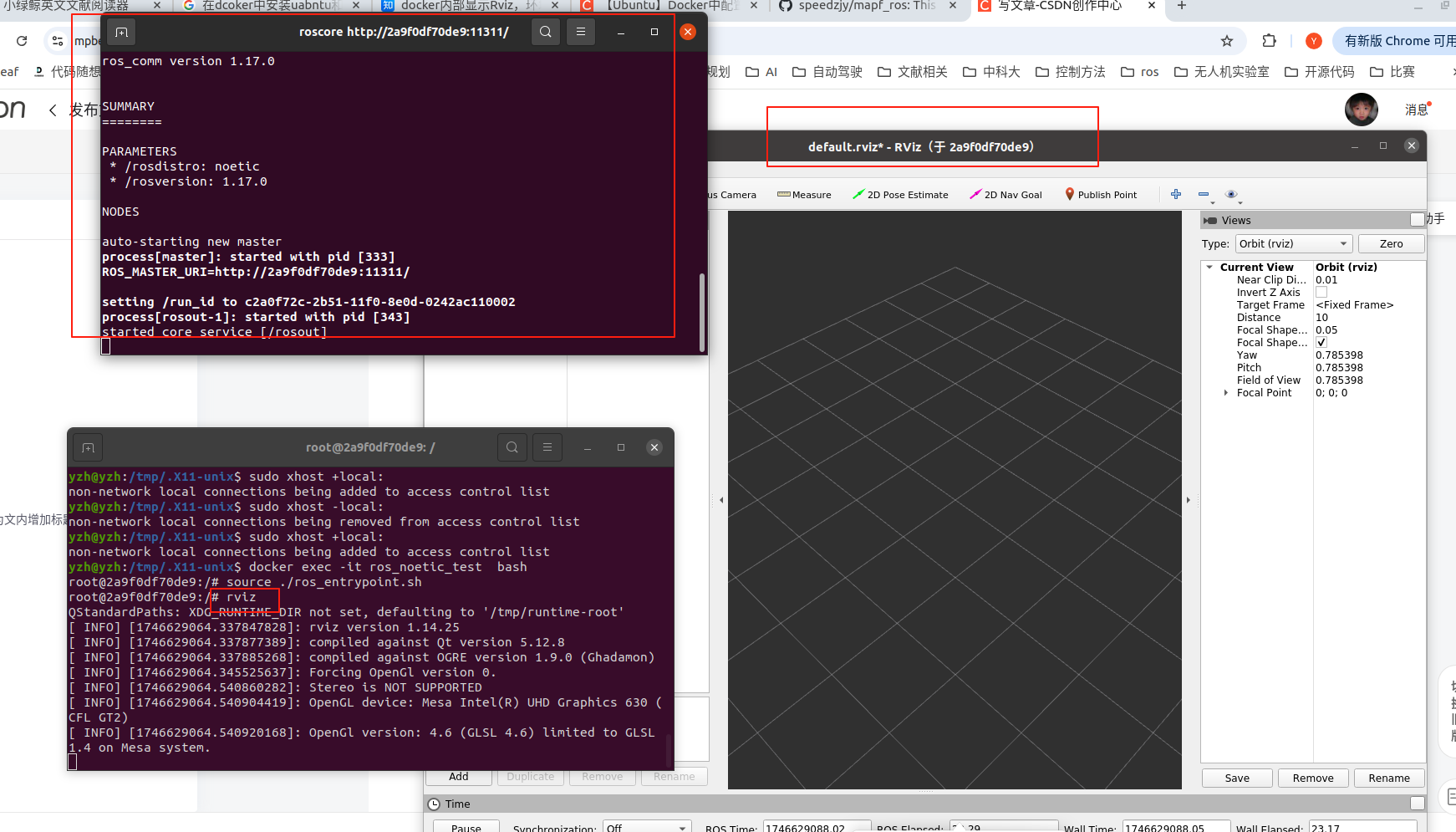
(1)打开两个终端,进入容器内
#ros_noetic_test 是容器名
docker exec -it ros_noetic_test bash
(2)刷新环境变量
source ./ros_entrypoint.sh(3)一个启动roscore 一个启动rviz或者gazebo
二、docker 相关指令
1. 查看当前容器
#只能查看当前正在启动的容器
docker ps
#查看所有容器
docker ps -a2. 启动容器
docker start 容器名3. 停止容器
docker stop 容器名
腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)