基于HISI3519dv500的yolov8-obb车位检测
基于HISI3519dv500的yolov8-obb车位检测
·
1. 数据标注
标注软件:roLabelImg
安装方式:见 https://github.com/cgvict/roLabelImg.git
操作指南: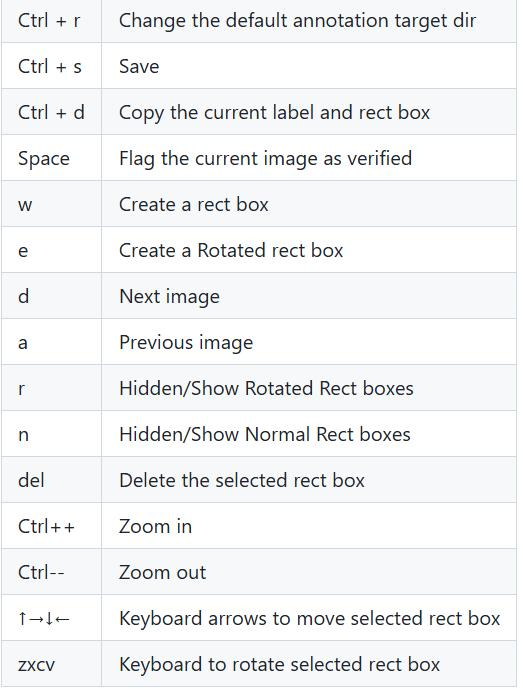
标注后的数据格式如下:
<annotation verified="no">
<folder>4800</folder>
<filename>frame_0000</filename>
<path>D:\12345\20250416-9\4800\frame_0000.jpg</path>
<source>
<database>Unknown</database>
</source>
<size>
<width>3840</width>
<height>2160</height>
<depth>3</depth>
</size>
<segmented>0</segmented>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1730.6829</cx>
<cy>2084.2789</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.07</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>2228.6829</cx>
<cy>2087.9741</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.04</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1747.6829</cx>
<cy>1946.7561</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.12</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1767.6829</cx>
<cy>1800.7561</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.1</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1431.6829</cx>
<cy>1770.7561</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.12</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1400.6829</cx>
<cy>2040.7561</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.1</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-occupied</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1446.6829</cx>
<cy>1630.7561</cy>
<w>254.0</w>
<h>132.0</h>
<angle>0.08</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-empty</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>2241.1829</cx>
<cy>1949.2561</cy>
<w>227.0</w>
<h>141.0</h>
<angle>0.1</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-empty</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>2259.1829</cx>
<cy>1816.2561</cy>
<w>227.0</w>
<h>141.0</h>
<angle>0.1</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-empty</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>2274.1829</cx>
<cy>1675.2561</cy>
<w>227.0</w>
<h>141.0</h>
<angle>0.1</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-empty</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1768.1829</cx>
<cy>1667.2561</cy>
<w>227.0</w>
<h>141.0</h>
<angle>0.1</angle>
</robndbox>
</object>
<object>
<type>robndbox</type>
<name>space-empty</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<robndbox>
<cx>1417.1829</cx>
<cy>1897.2561</cy>
<w>227.0</w>
<h>141.0</h>
<angle>0.1</angle>
</robndbox>
</object>
</annotation>
2. 数据格式转换
1. 先转换为DOTA的txt格式
import os
import xml.etree.ElementTree as ET
import math
cls_list = ['space-occupied','space-empty'] # 修改为自己的标签
def edit_xml(xml_file, dotaxml_file):
"""
修改xml文件
:param xml_file:xml文件的路径
:return:
"""
# dxml_file = open(xml_file,encoding='gbk')
# tree = ET.parse(dxml_file).getroot()
print(xml_file)
tree = ET.parse(xml_file)
objs = tree.findall('object')
for ix, obj in enumerate(objs):
x0 = ET.Element("x0") # 创建节点
y0 = ET.Element("y0")
x1 = ET.Element("x1")
y1 = ET.Element("y1")
x2 = ET.Element("x2")
y2 = ET.Element("y2")
x3 = ET.Element("x3")
y3 = ET.Element("y3")
# obj_type = obj.find('bndbox')
# type = obj_type.text
# print(xml_file)
if (obj.find('robndbox') == None):
obj_bnd = obj.find('bndbox')
obj_xmin = obj_bnd.find('xmin')
obj_ymin = obj_bnd.find('ymin')
obj_xmax = obj_bnd.find('xmax')
obj_ymax = obj_bnd.find('ymax')
# 以防有负值坐标
xmin = max(float(obj_xmin.text), 0)
ymin = max(float(obj_ymin.text), 0)
xmax = max(float(obj_xmax.text), 0)
ymax = max(float(obj_ymax.text), 0)
obj_bnd.remove(obj_xmin) # 删除节点
obj_bnd.remove(obj_ymin)
obj_bnd.remove(obj_xmax)
obj_bnd.remove(obj_ymax)
x0.text = str(xmin)
y0.text = str(ymax)
x1.text = str(xmax)
y1.text = str(ymax)
x2.text = str(xmax)
y2.text = str(ymin)
x3.text = str(xmin)
y3.text = str(ymin)
else:
obj_bnd = obj.find('robndbox')
obj_bnd.tag = 'bndbox' # 修改节点名
obj_cx = obj_bnd.find('cx')
obj_cy = obj_bnd.find('cy')
obj_w = obj_bnd.find('w')
obj_h = obj_bnd.find('h')
obj_angle = obj_bnd.find('angle')
cx = float(obj_cx.text)
cy = float(obj_cy.text)
w = float(obj_w.text)
h = float(obj_h.text)
angle = float(obj_angle.text)
obj_bnd.remove(obj_cx) # 删除节点
obj_bnd.remove(obj_cy)
obj_bnd.remove(obj_w)
obj_bnd.remove(obj_h)
obj_bnd.remove(obj_angle)
x0.text, y0.text = rotatePoint(cx, cy, cx - w / 2, cy - h / 2, -angle)
x1.text, y1.text = rotatePoint(cx, cy, cx + w / 2, cy - h / 2, -angle)
x2.text, y2.text = rotatePoint(cx, cy, cx + w / 2, cy + h / 2, -angle)
x3.text, y3.text = rotatePoint(cx, cy, cx - w / 2, cy + h / 2, -angle)
# obj.remove(obj_type) # 删除节点
obj_bnd.append(x0) # 新增节点
obj_bnd.append(y0)
obj_bnd.append(x1)
obj_bnd.append(y1)
obj_bnd.append(x2)
obj_bnd.append(y2)
obj_bnd.append(x3)
obj_bnd.append(y3)
tree.write(dotaxml_file, method='xml', encoding='utf-8') # 更新xml文件
# 转换成四点坐标
def rotatePoint(xc, yc, xp, yp, theta):
xoff = xp - xc;
yoff = yp - yc;
cosTheta = math.cos(theta)
sinTheta = math.sin(theta)
pResx = cosTheta * xoff + sinTheta * yoff
pResy = - sinTheta * xoff + cosTheta * yoff
return str(int(xc + pResx)), str(int(yc + pResy))
def totxt(xml_path, out_path):
# 想要生成的txt文件保存的路径,这里可以自己修改
files = os.listdir(xml_path)
i = 0
for file in files:
tree = ET.parse(xml_path + os.sep + file)
root = tree.getroot()
name = file.split('.')[0]
output = out_path + '/' + name + '.txt'
file = open(output, 'w')
i = i + 1
objs = tree.findall('object')
for obj in objs:
cls = obj.find('name').text
box = obj.find('bndbox')
x0 = int(float(box.find('x0').text))
y0 = int(float(box.find('y0').text))
x1 = int(float(box.find('x1').text))
y1 = int(float(box.find('y1').text))
x2 = int(float(box.find('x2').text))
y2 = int(float(box.find('y2').text))
x3 = int(float(box.find('x3').text))
y3 = int(float(box.find('y3').text))
if x0 < 0:
x0 = 0
if x1 < 0:
x1 = 0
if x2 < 0:
x2 = 0
if x3 < 0:
x3 = 0
if y0 < 0:
y0 = 0
if y1 < 0:
y1 = 0
if y2 < 0:
y2 = 0
if y3 < 0:
y3 = 0
for cls_index, cls_name in enumerate(cls_list):
if cls == cls_name:
file.write("{} {} {} {} {} {} {} {} {} {}\n".format(x0, y0, x1, y1, x2, y2, x3, y3, cls, cls_index))
file.close()
# print(output)
print(i)
if __name__ == '__main__':
# -----**** 第一步:把xml文件统一转换成旋转框的xml文件 ****-----
roxml_path = r'./roxml/'
dotaxml_path = r'./dotaxml/'
out_path = r'./txt/'
filelist = os.listdir(roxml_path)
for file in filelist:
edit_xml(os.path.join(roxml_path, file), os.path.join(dotaxml_path, file))
# -----**** 第二步:把旋转框xml文件转换成txt格式 ****-----
totxt(dotaxml_path, out_path)
2. 转换为Yolo格式
from ultralytics.data.converter import convert_dota_to_yolo_obb
convert_dota_to_yolo_obb(r'/home/mahxn0/workspace/datasets/carLoc/car')
3. 修改yolo ultralytics/data/converter.py代码两处地方
# Class names to indices mapping
class_mapping = { // 根据实际修改
"space-occupied": 0,
"space-empty": 1
}
image_paths = list(image_dir.iterdir())
for image_path in TQDM(image_paths, desc=f"Processing {phase} images"):
if image_path.suffix != ".jpg": // 之前是png,根据实际修改
continue
运行后得到的数据目录结构如下: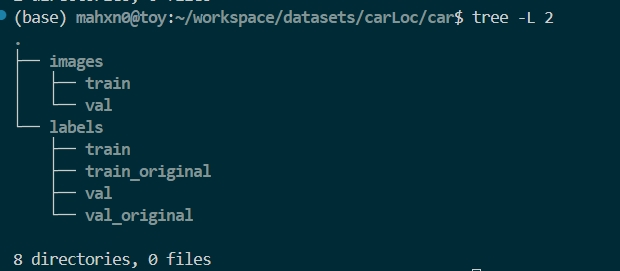
train_originnal/val_original中存放上面转换后的txt,执行脚本后在train/val下生成yolo需要的txt
0 0.41875 0.930093 0.484635 0.938426 0.482292 0.999537 0.416406 0.991204
0 0.547917 0.933333 0.614062 0.938426 0.6125 0.999074 0.546615 0.994444
0 0.424219 0.863889 0.489844 0.877778 0.485677 0.938426 0.420052 0.924537
0 0.428906 0.797222 0.494792 0.808796 0.491406 0.869907 0.425521 0.85787
0 0.341927 0.782407 0.407552 0.796296 0.403385 0.856944 0.33776 0.843056
0 0.333333 0.908333 0.399219 0.919907 0.395833 0.981019 0.329948 0.968981
0 0.345052 0.719444 0.410938 0.729167 0.408333 0.789815 0.342187 0.780556
1 0.55599 0.864352 0.614844 0.875 0.611198 0.939815 0.552344 0.92963
1 0.560677 0.802778 0.619531 0.813426 0.615885 0.878241 0.557031 0.868056
1 0.564583 0.7375 0.623437 0.748148 0.619792 0.812963 0.560937 0.802778
1 0.432812 0.733796 0.491667 0.744444 0.488021 0.809259 0.429167 0.799074
1 0.341406 0.840278 0.40026 0.850926 0.396615 0.915741 0.33776 0.905556
3. 模型训练
参考YOLOV8的训练,不再赘述
4. 模型量化
4.1 导出ONNX
将yolov8的dfl放在后处理,onnx输出修改为:
name: output0, shape: (1,64,80,80),
name: 317, shape: (1,3,80,80),
name: 338, shape: (1,64,40,40),
name: 331, shape: (1,3,40,40),
name: 352, shape: (1,64,20,20),
name: 345, shape: (1,3,20,20)
4.2 量化参数修改
aipp_op {
related_input_rank : 0
input_format : YUV420SP
model_format : RGB
aipp_mode: static
mean_chn_0 : 0
mean_chn_1 : 0
mean_chn_2 : 0
var_reci_chn_0 : 0.0039062
var_reci_chn_1 : 0.0039062
var_reci_chn_2 : 0.0039062
}
4.3 atc量化
atc --dump_data=0 --input_shape="images:1,3,640,640" --input_type="images:UINT8" --log_level=0 --online_model_type=0 --batch_num=1 --input_format=NCHW --output="./om/" --soc_version=Hi3519DV500 --insert_op_conf=./yolov8n_obb.cfg --framework=5 --compile_mode=0 --save_original_model=true --model="./onnx/yolov8n_obb.onnx" --image_list="images:./data/car_obb.list"
5. 后处理关键代码
int yolo_obb_decode(const float *box_tensor,
const float *cls_tensor,
const float *cls_sum_tensor,
const float *angle_tensor,
int stride,
int grid_h,
int grid_w,
int dfl_len,
float threshold,
int class_number,
int model_h,
int model_w,
bool net_sigmoid,
std::vector<ObbBox> &objects) {
// cal obj number
int validCount = 0;
// tensor cp
auto cls_tensor_ptr = cls_tensor;
auto box_tensor_prt = box_tensor;
auto cls_sum_tensor_prt = cls_sum_tensor;
auto angle_tensor_ptr = angle_tensor;
// dfl param
int reg_max = dfl_len;
int reg_groups = 4;
int reg_proj_conv_weight_num = reg_max * reg_groups;
float dis_after_sm[reg_max];
std::vector<float> proj_conv_weights;
// grid to get value
// some backend need align by w
grid_w = utils::AlignData(grid_w);
int grid_len = grid_w * grid_h;
for (int h = 0; h < grid_h; h++) {
for (int w = 0; w < grid_w; w++) {
int max_index = -1;
float max_score = 0.0f;
// ptr move offset
int offset = h * grid_w + w;
// fast pass box by shape=[1,1,80,80]
if (cls_sum_tensor_prt != nullptr) {
if (cls_sum_tensor_prt[offset] < threshold) {
continue;
}
}
// get max score and label id
for (int c = 0; c < class_number; c++) {
float pred_score;
if (net_sigmoid) {
pred_score = cls_tensor_ptr[offset];
} else {
pred_score = sigmoid(cls_tensor_ptr[offset]);
}
if (pred_score > max_score) {
max_score = pred_score;
max_index = c;
}
offset += grid_len; //ptr move
}
if (max_score > threshold) {
offset = h * grid_w + w; //now offset
// get the reg_conv_weight to compute dfl
proj_conv_weights.clear();
for (int g = 0; g < reg_proj_conv_weight_num; g++) {
proj_conv_weights.emplace_back(box_tensor_prt[offset]);
offset += grid_len; //ptr move
}
// box decode,ltrb is rotate
float *proj_conv_ptr = proj_conv_weights.data();
float l = proj_conv_softmax(proj_conv_ptr, dis_after_sm, reg_max);
float t = proj_conv_softmax(proj_conv_ptr + reg_max, dis_after_sm, reg_max);
float r = proj_conv_softmax(proj_conv_ptr + 2 * reg_max, dis_after_sm, reg_max);
float b = proj_conv_softmax(proj_conv_ptr + 3 * reg_max, dis_after_sm, reg_max);
ObbBox obj;
// angle tensor
float angle;
if (net_sigmoid) {
angle = (angle_tensor_ptr[grid_len * 0 + h * grid_w + w] - 0.25) * 3.1415927410125732;
} else {
angle = (sigmoid(angle_tensor_ptr[grid_len * 0 + h * grid_w + w]) - 0.25) *
3.1415927410125732;
}
obj.angle = angle;
// box
float cos1 = cos(angle);
float sin1 = sin(angle);
float fx = (r - l) / 2;
float fy = (b - t) / 2;
obj.cx =
((fx * cos1 - fy * sin1) + (static_cast<float>(w) + 0.5f)) * static_cast<float>(stride);
obj.cy =
((fx * sin1 + fy * cos1) + (static_cast<float>(h) + 0.5f)) * static_cast<float>(stride);
obj.width = (l + r) * static_cast<float>(stride);
obj.height = (t + b) * static_cast<float>(stride);
obj.score = max_score;
obj.label_id = max_index;
// post result
objects.emplace_back(obj);
validCount++;
}
}
}
return validCount;
}
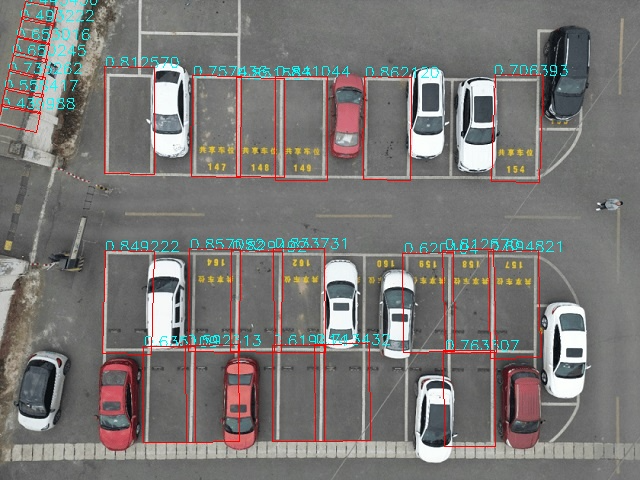
6. 板端执行效果(预处理 + 推理 + 后处理时间小于40ms)

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 16
16 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)