ROS数据可视化工具PlotJuggler
专为实时和历史数据分析设计。其核心优势在于高效处理大规模时间序列数据,支持多种数据源(如 ROS、CSV、JSON 等),并提供交互式分析功能。广泛应用于机器人、自动驾驶、工业自动化等领域。,成为机器人及自动化领域的数据分析利器。尤其适合需要快速定位时序数据异常的场景。对于复杂分析(如联邦学习),需结合 Flink 等流式计算引擎扩展。PlotJuggler 是一款开源的。PlotJuggler
·
以下是关于 PlotJuggler 的详细介绍,涵盖其核心功能、技术架构、应用场景及与同类工具的对比:
1. 工具概述
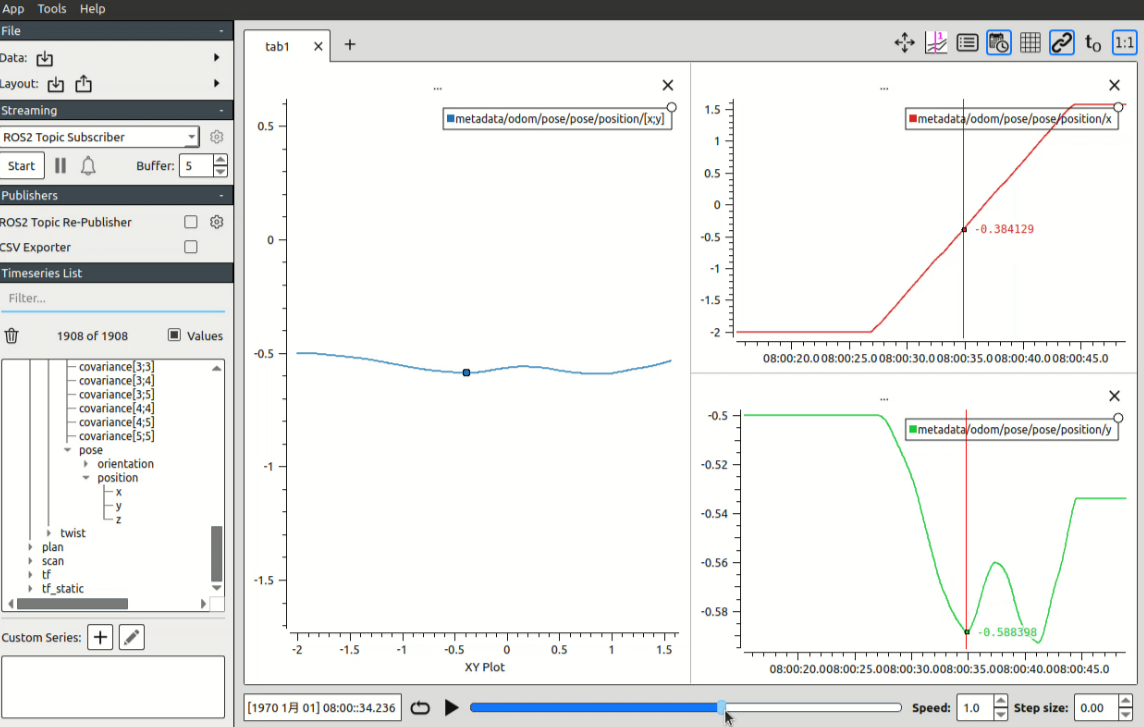
PlotJuggler 是一款开源的 时间序列数据可视化工具,专为实时和历史数据分析设计。其核心优势在于高效处理大规模时间序列数据,支持多种数据源(如 ROS、CSV、JSON 等),并提供交互式分析功能。广泛应用于机器人、自动驾驶、工业自动化等领域。
2. 核心功能
(1) 数据可视化
- 多图表支持:折线图、散点图、3D 图等,支持多窗口、多轴同步显示。
- 实时数据流:可订阅 ROS 话题、MQTT、WebSocket 等实时数据源,延迟低至毫秒级。
- 历史数据回放:支持 ROS bag、CSV、YAML 等格式,可按任意速度重放或逐帧分析。
(2) 数据处理
- 数学运算:内置导数、积分、移动平均、滤波(如低通/高通)等工具。
- 数据同步:自动对齐多源数据的时间戳,便于跨传感器分析。
- 脚本扩展:支持 Lua 脚本自定义数据变换(如四元数转欧拉角)。
(3) 交互与扩展
- 拖放操作:直观的界面设计,无需编程基础即可上手。
- 插件系统:支持 ROS、MQTT、ZeroMQ 等插件,可扩展新数据源或功能。
- 布局保存:可视化配置可导出为 JSON,便于复用。
3. 技术架构
- 开发语言:C++(高性能数据处理) + Qt(跨平台 GUI)。
- 依赖库:OpenCV(图像处理)、ZeroMQ(网络通信)、Trilinos(数值计算)。
- 部署要求:
- 硬件:推荐四核 CPU + 16GB RAM(处理大规模数据)。
- 软件:支持 Ubuntu/Windows/macOS,需 ROS 1/2 插件集成。
4. 应用场景
(1) 机器人开发
- 实时调试:监控传感器数据(如 IMU、激光雷达)并分析异常。
- 离线分析:通过 ROS bag 回放优化 SLAM 算法轨迹。
(2) 自动驾驶
- 多传感器融合:同步可视化摄像头、雷达数据,评估感知算法延迟。
- 日志分析:解析 ULog(PX4 无人机日志),计算姿态估计误差。
(3) 工业自动化
- 故障诊断:通过历史数据回溯设备振动或温度异常。
- 性能优化:分析控制指令与执行结果的时序关系。
5. 与同类工具对比
| 工具 | PlotJuggler | rqt_plot | MATLAB |
|---|---|---|---|
| 实时性 | ✅ 毫秒级延迟 | ❌ 高延迟 | ❌ 依赖导入数据 |
| 数据处理 | ✅ 内置滤波/公式计算 | ❌ 仅绘图 | ✅ 需手动编程 |
| ROS 集成 | ✅ 直接订阅话题/解析 bag | ✅ 基础支持 | ❌ 需额外工具 |
| 扩展性 | ✅ 插件 + Lua 脚本 | ❌ 功能固定 | ✅ 依赖工具箱 |
| 适用场景 | 实时调试 + 离线分析 | 简单可视化 | 复杂算法开发 |
6. 使用案例
- 案例 1:在自动驾驶测试中,PlotJuggler 同步显示 GPS 轨迹与视觉检测结果,发现定位漂移问题。
- 案例 2:工业机器人通过 PlotJuggler 分析关节扭矩数据,优化运动控制参数。
7. 局限性
- 实时存储:不支持长时间数据流存储,需结合外部数据库。
- 机器学习:缺乏内置模型训练/预测功能,需配合其他工具。
总结
PlotJuggler 凭借其 高性能、易用性 和 ROS 深度集成,成为机器人及自动化领域的数据分析利器。尤其适合需要快速定位时序数据异常的场景。对于复杂分析(如联邦学习),需结合 Flink 等流式计算引擎扩展。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 19
19 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)