ubuntu24 c++ 自定义目录编译opencv4.12
自定义生成opencv目录的话这个参数建议加上,不然Clion中的CmakeLists.txt可能找不到opencv。这一条参数是最终opencv生成的位置,默认是/usr/local/,此次我指定了一个文件夹opencv4.12。编译之前一定要安装好必须的库,否则即使提示编译成功,调用opencv后也可能会有问题。正常情况下 Clion CMakeLists.txt中设置成以下内容就可以了。保存
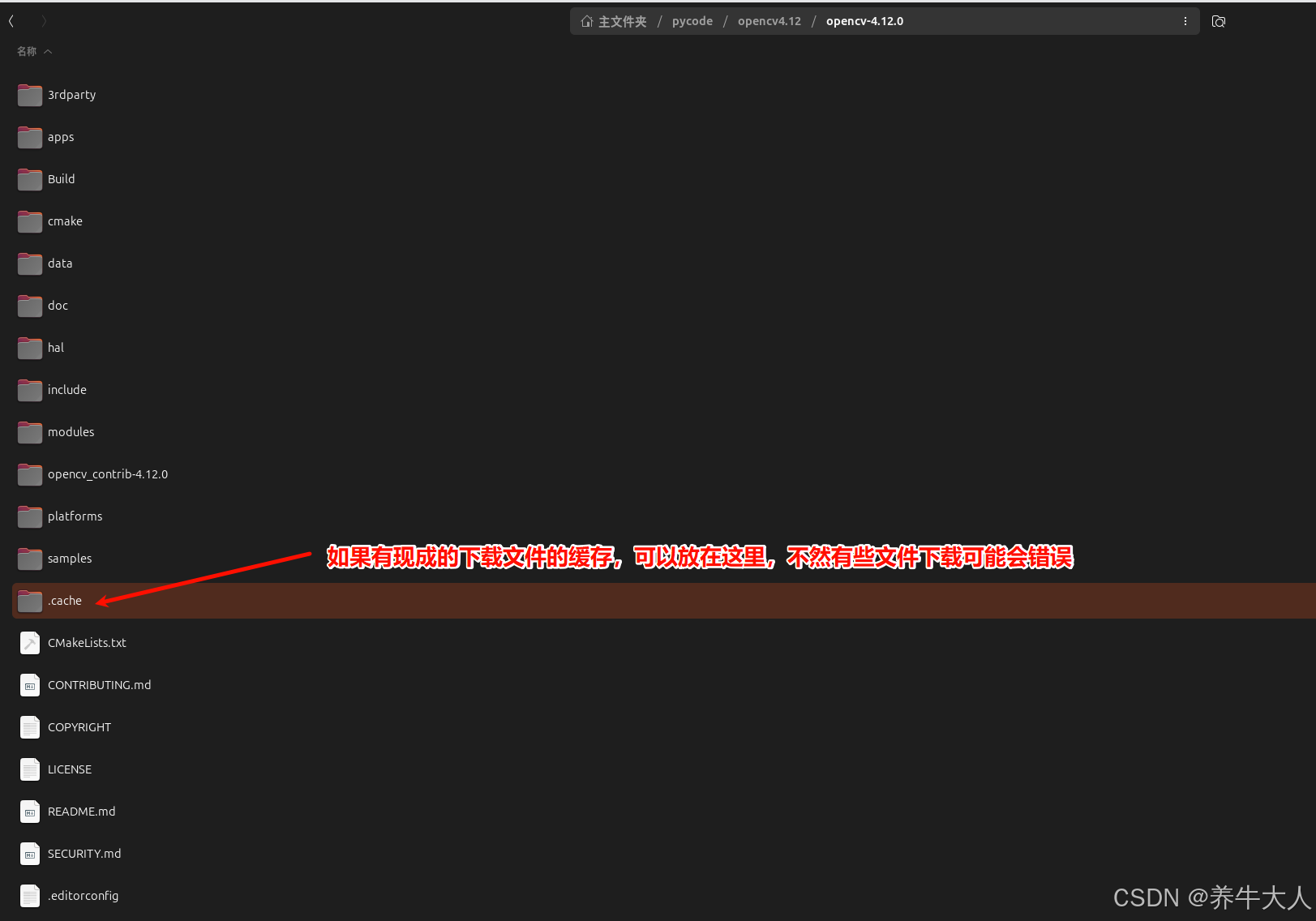
目录结构 在opencv-4.12.0文件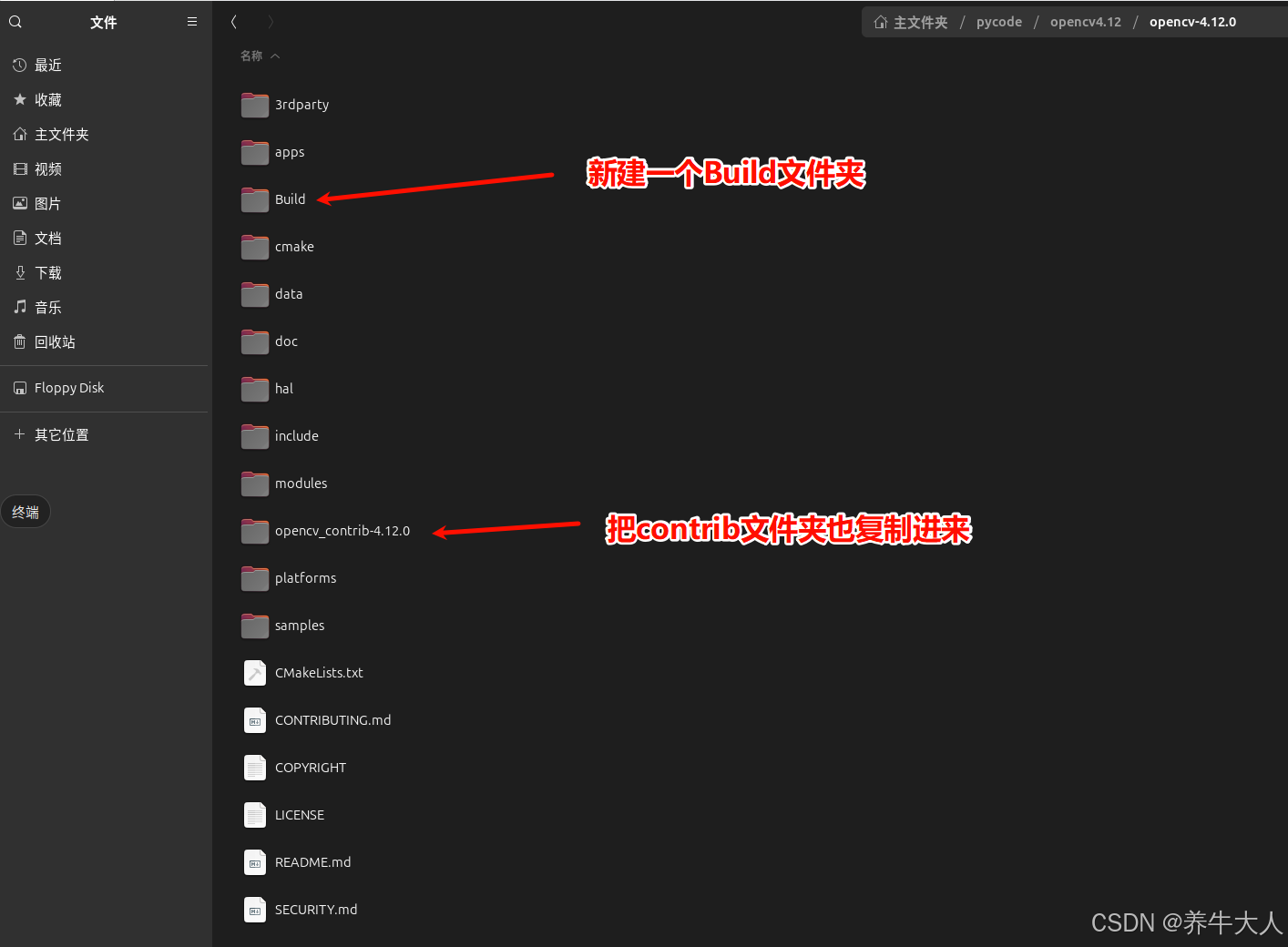
编译之前一定要安装好必须的库,否则即使提示编译成功,调用opencv后也可能会有问题
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install -y g++
sudo apt-get install -y cmake
sudo apt-get install -y make
sudo apt-get install -y wget
sudo apt-get install -y unzip
sudo apt-get install -y git
sudo apt-get install build-essential pkg-config
sudo apt-get install libgtk2.0-dev libgtk-3-dev libglib2.0-dev libavcodec-dev libavformat-dev libswscale-dev libavutil-dev libv4l-dev liblapacke-dev libxvidcore-dev libx264-dev
sudo apt-get install python-dev python-numpy
sudo apt-get install libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev
sudo apt-get install libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper1 libjasper-dev libdc1394-22-dev libopenexr-dev libwebp-dev
sudo apt-get install libatlas-base-dev gfortran
sudo apt-get install ffmpeg
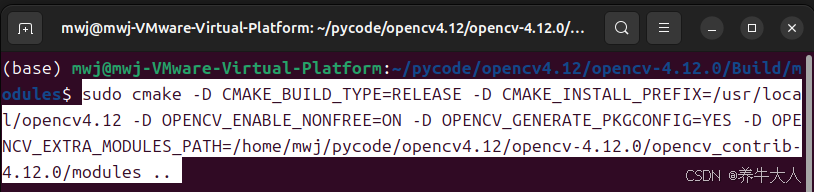
以下是编译opencv4.12的命令(有更多的参数待研究)
sudo cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local/opencv4.12 -D OPENCV_ENABLE_NONFREE=ON -D OPENCV_GENERATE_PKGCONFIG=YES -D OPENCV_EXTRA_MODULES_PATH=/home/mwj/pycode/opencv4.12/opencv-4.12.0/opencv_contrib-4.12.0/modules ..
可进入build目录后,右键打开终端
重要备注:
这一条参数是最终opencv生成的位置,默认是/usr/local/,此次我指定了一个文件夹opencv4.12
-D CMAKE_INSTALL_PREFIX=/usr/local/opencv4.12
自定义生成opencv目录的话这个参数建议加上,不然Clion中的CmakeLists.txt可能找不到opencv
-D OPENCV_GENERATE_PKGCONFIG=YES
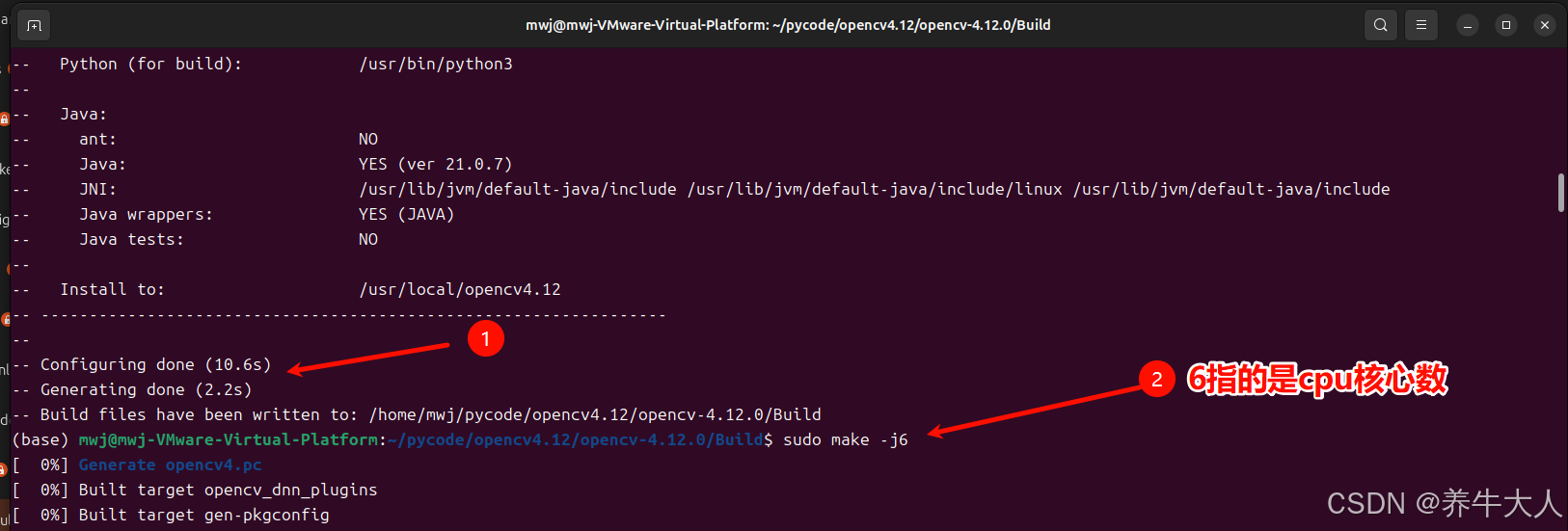
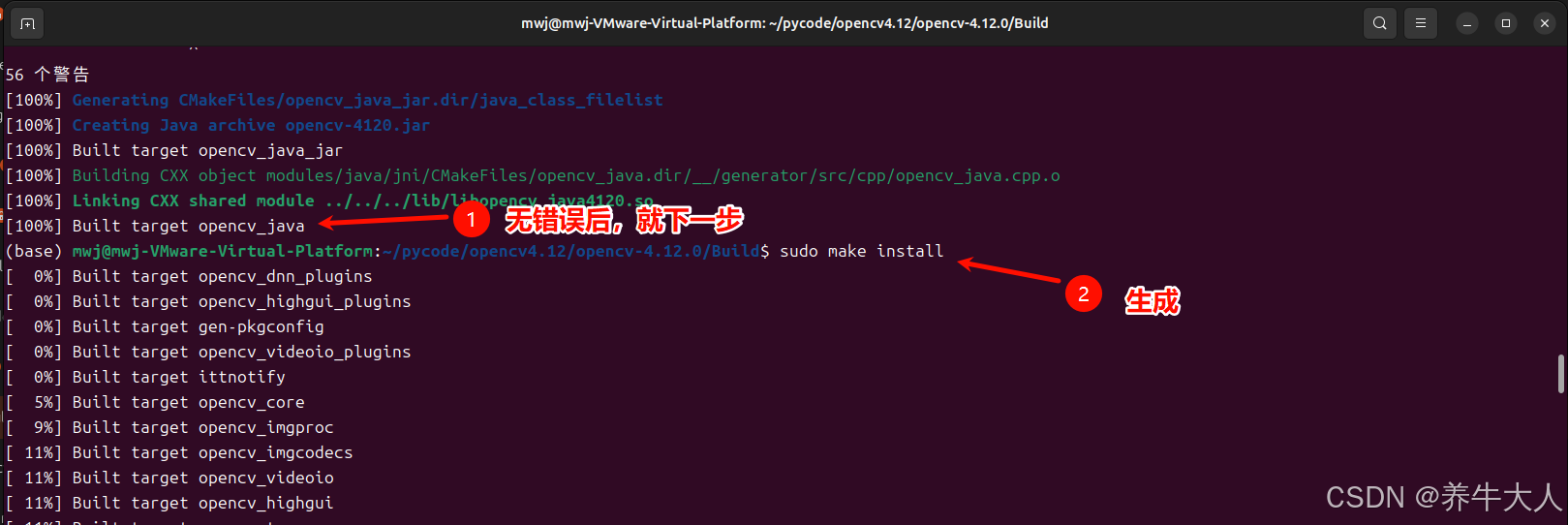
cmake之后,就是编译
sudo make -j6
sudo make install
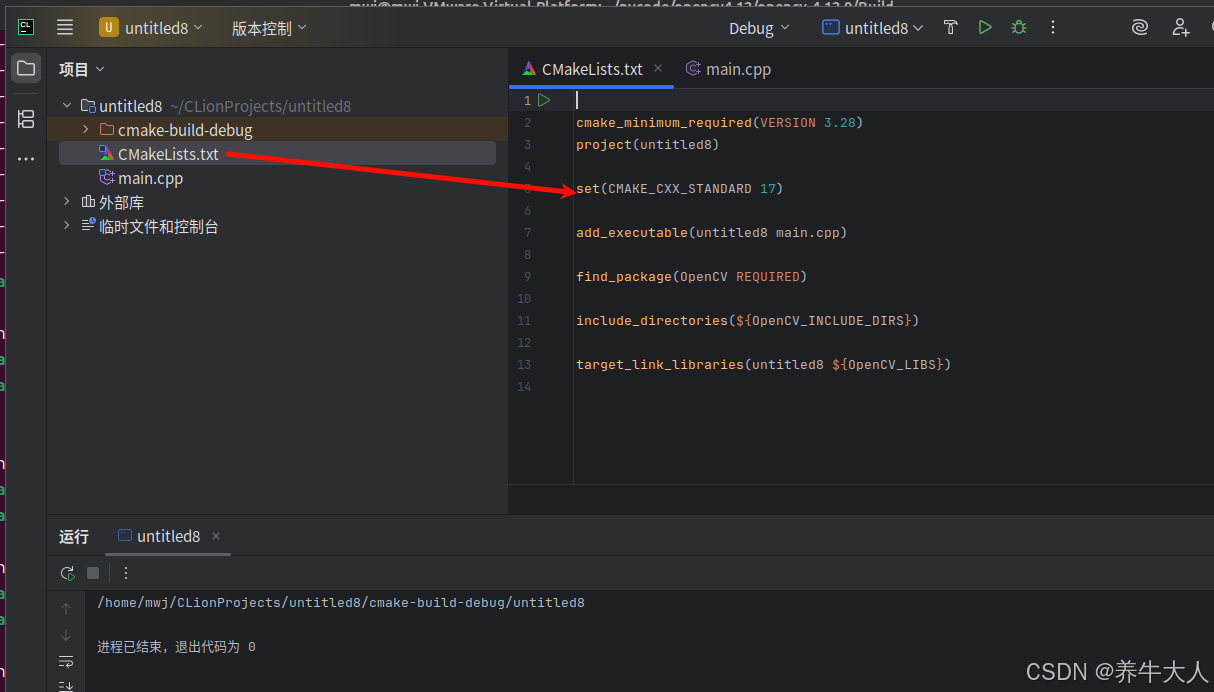
正常情况下 Clion CMakeLists.txt中设置成以下内容就可以了
cmake_minimum_required(VERSION 3.31)
# 定义项目名称
project(untitled6)
# 设置 C++ 标准
set(CMAKE_CXX_STANDARD 17)
# OpenCV 目录设置
#set(OpenCV_DIR "G:\\Open412MinGw11.2viz")
# 查找 OpenCV 包
find_package(OpenCV REQUIRED)
# 包含 OpenCV 头文件目录
include_directories(${OpenCV_INCLUDE_DIRS})
# 查找项目中的所有 .cpp 源文件,排除 CMake 生成目录
file(GLOB_RECURSE SOURCES
${CMAKE_SOURCE_DIR}/*.cpp
${CMAKE_SOURCE_DIR}/*.hpp
)
# 手动排除掉 CMake 生成的 CMakeFiles 目录
list(FILTER SOURCES EXCLUDE REGEX "/CMakeFiles/")
# 将找到的文件添加到可执行文件中
add_executable(untitled6 ${SOURCES})
# 链接 OpenCV 库
target_link_libraries(untitled6 ${OpenCV_LIBS})或者:
project(untitled6)
# 设置C++标准
set(CMAKE_CXX_STANDARD 17)
# 查找OpenCV包
find_package(OpenCV REQUIRED)
# 包含OpenCV头文件目录
include_directories(${OpenCV_INCLUDE_DIRS})
# 添加可执行文件
add_executable(untitled6 main.cpp)
# 链接OpenCV库
target_link_libraries(untitled6 ${OpenCV_LIBS})用以下的内容,可能会提示:undefined reference to `cv::imread(std::__cxx11::basi
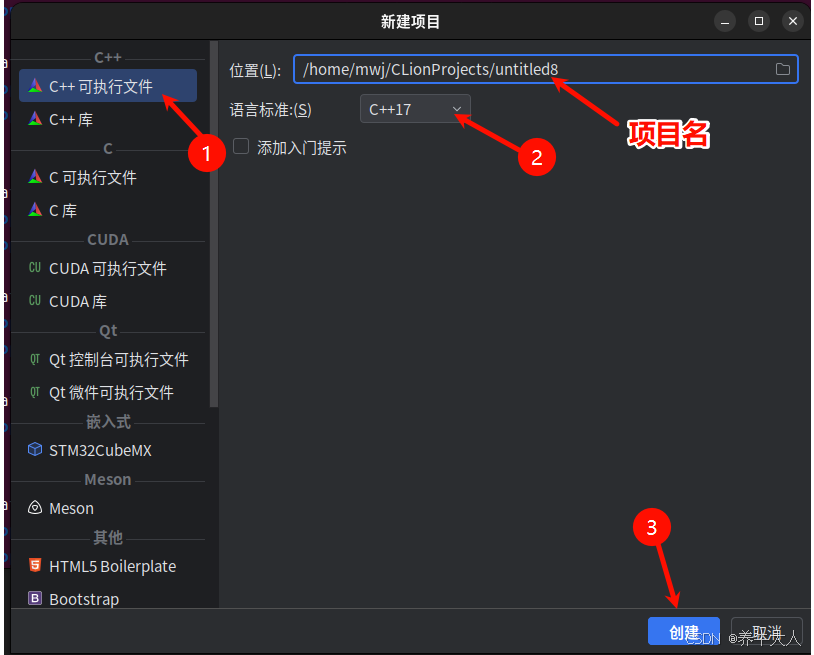
cmake_minimum_required(VERSION 3.28)
project(untitled8)
set(CMAKE_CXX_STANDARD 17)
add_executable(untitled8 main.cpp)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})Clion如果没有下载可以用命令下载 sudo snap install clion --classic
Clion现在有免费版本了
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
int main() {
// 创建一个空白图像
const int width = 800;
const int height = 600;
Mat image = Mat::zeros(height, width, CV_8UC3);
image.setTo(Scalar(255, 255, 255)); // 设置背景为白色
// 圆的参数
Point center(width/2, height/2);
int radius = 200;
Scalar circleColor(0, 0, 255); // 红色
int thickness = 3;
// 绘制圆
circle(image, center, radius, circleColor, thickness);
// 计算内嵌等边三角形的三个顶点
vector<Point> trianglePoints;
for (int i = 0; i < 3; i++) {
double angle = CV_PI/2 + i * 2 * CV_PI / 3; // 从垂直向上开始,每隔120度一个点
int x = center.x + radius * cos(angle);
int y = center.y - radius * sin(angle); // 注意y轴向下为正
trianglePoints.push_back(Point(x, y));
}
// 绘制三角形
vector<vector<Point>> contours;
contours.push_back(trianglePoints);
Scalar triangleColor(0, 255, 0); // 绿色
drawContours(image, contours, 0, triangleColor, thickness);
// 显示图像
namedWindow("Circle with Inscribed Triangle", WINDOW_NORMAL);
imshow("Circle with Inscribed Triangle", image);
// 等待按键退出
waitKey(0);
return 0;
} 
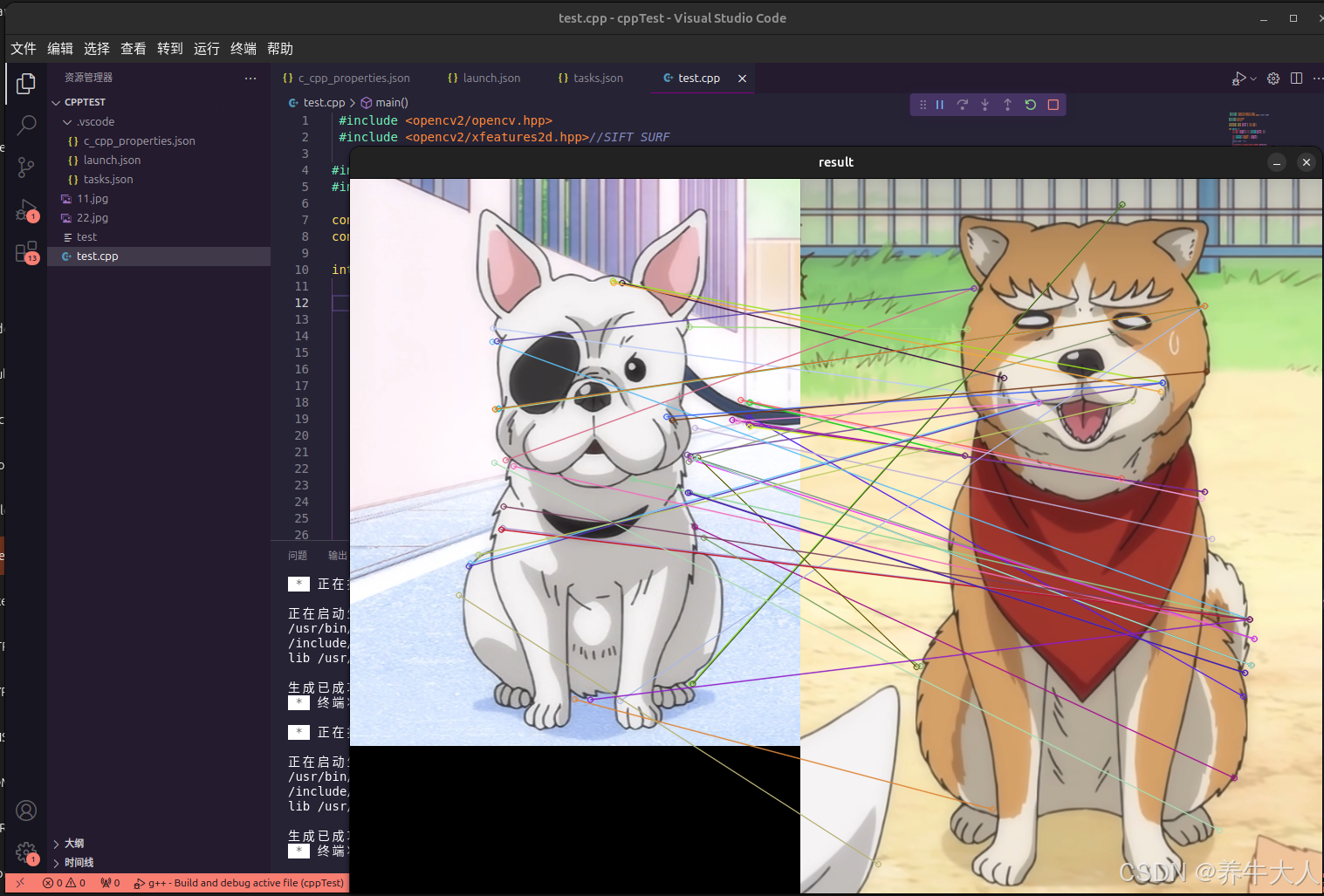
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>//SIFT SURF
#include<iostream>
#include<vector>
constexpr auto path0 = "1.jpg";
constexpr auto path1 = "2.jpg";
int main() {
cv::Mat image0 = cv::imread(path0, 1);
cv::Mat image1 = cv::imread(path1, 1);
cv::imshow("image0", image0);
cv::imshow("image1", image1);
/*
step1:特征检测器
*/
cv::Ptr<cv::xfeatures2d::SURF> detector;
detector = cv::xfeatures2d::SURF::create(800); //800为海塞矩阵阈值,越大越精准
/*
-----SURF----
cv::Ptr<cv::xfeatures2d::SURF> detector;
detector = cv::xfeatures2d::SURF::create(800); //800为海塞矩阵阈值,越大越精准
-----SIFT-----
cv::Ptr<cv::xfeatures2d::SIFT> detector;
detector = cv::xfeatures2d::SIFT::create(800);//800为保留的点数
-----ORB------
cv::Ptr<cv::ORB> detector;
detector = cv::ORB::create(800);//保留点数
-----STAR-----
cv::Ptr<cv::xfeatures2d::StarDetector> detector;
detector = cv::xfeatures2d::StarDetector::create();
-----MSD-----
cv::Ptr<cv::xfeatures2d::MSDDetector> detector;
detector = cv::xfeatures2d::MSDDetector::create();
*/
std::vector <cv::KeyPoint > key0;
std::vector <cv::KeyPoint > key1;
detector->detect(image0,key0,cv::noArray());
detector->detect(image1, key1, cv::noArray());
/*
step2:描述子提取器
*/
cv::Ptr<cv::xfeatures2d::SURF> Extractor;
Extractor = cv::xfeatures2d::SURF::create(800);
/*
以下都是xfeature2d中的提取器
-----SURF-----
-----SIFT-----
-----LUCID----
-----BriefDescriptorExtractor----
-----VGG-----
-----BoostDesc-----
*/
cv::Mat descriptor0, descriptor1;
Extractor->compute(image0, key0, descriptor0);
Extractor->compute(image1, key1, descriptor1);
/*
step3:匹配器
*/
cv::BFMatcher matcher;//暴力匹配器
std::vector<cv::DMatch> matches; // 存放匹配结果
std::vector<cv::DMatch> good_matches; //存放好的匹配结果
matcher.match(descriptor0, descriptor1, matches);
std::sort(matches.begin(), matches.end()); //筛选匹配点,根据match里面特征对的距离从小到大排序
int ptsPairs = std::min(50, (int)(matches.size() * 0.15));
std::cout << "匹配点数为" << ptsPairs << std::endl;
for (int i = 0; i < ptsPairs; i++)
{
good_matches.push_back(matches[i]); //距离最小的50个压入新的DMatch
}
cv::Mat result;
cv::drawMatches(image0, key0,
image1, key1,
good_matches, result,
cv::Scalar::all(-1), cv::Scalar::all(-1),
std::vector<char>(),
cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //绘制匹配点
cv::imshow("result", result);
cv::waitKey(0);
}可能会遇到undefined reference to cv::imread(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, int)'
这可能是clion里面的工具链的原因,要选择系统,因为opencv是由系统的g++编译的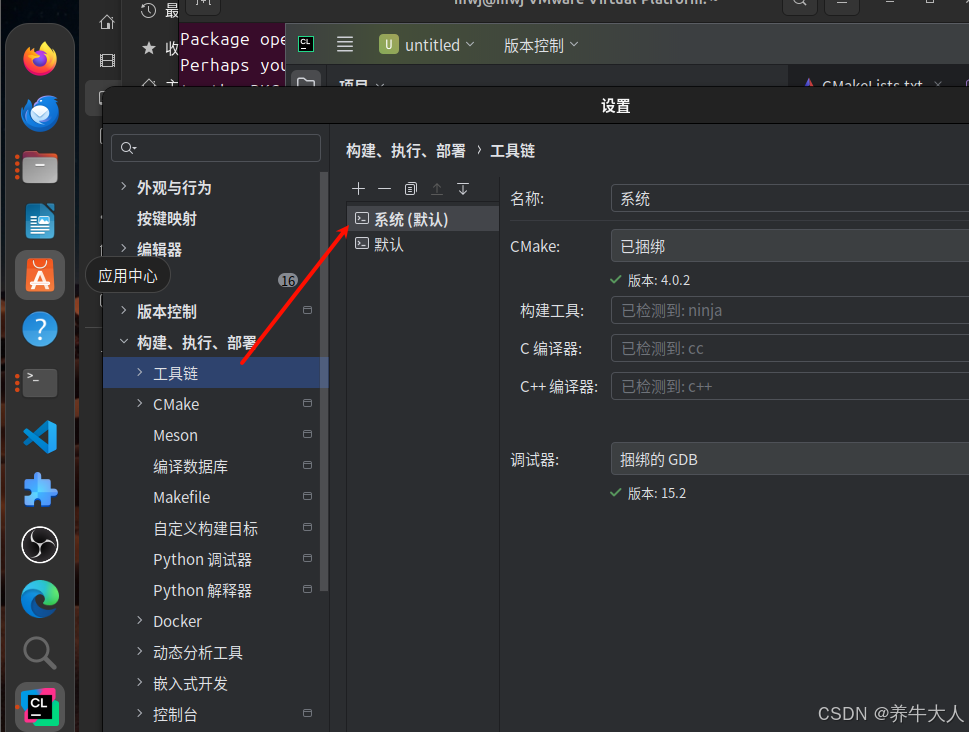
(可选设置)
sudo gedit /etc/ld.so.confsudo gedit /etc/ld.so.conf.d/opencv.conf添加:/usr/local/opencv4.12/lib
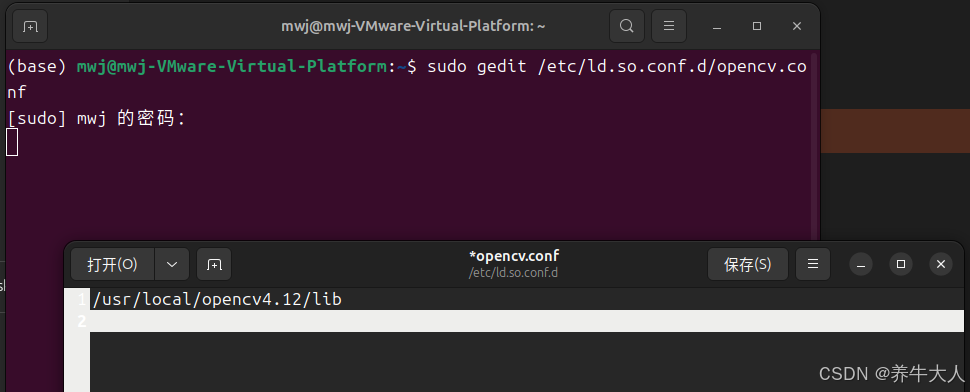
更新:
sudo ldconfig
或者
sudo /sbin/ldconfig
如果Clion中找不到opencv,可以设置变量
先打开 sudo gedit ~/.bashrc
export PKG_CONFIG_PATH=/usr/local/opencv4.12/lib/pkgconfig
export LD_LIBRARY_PATH=/usr/local/opencv4.12/lib
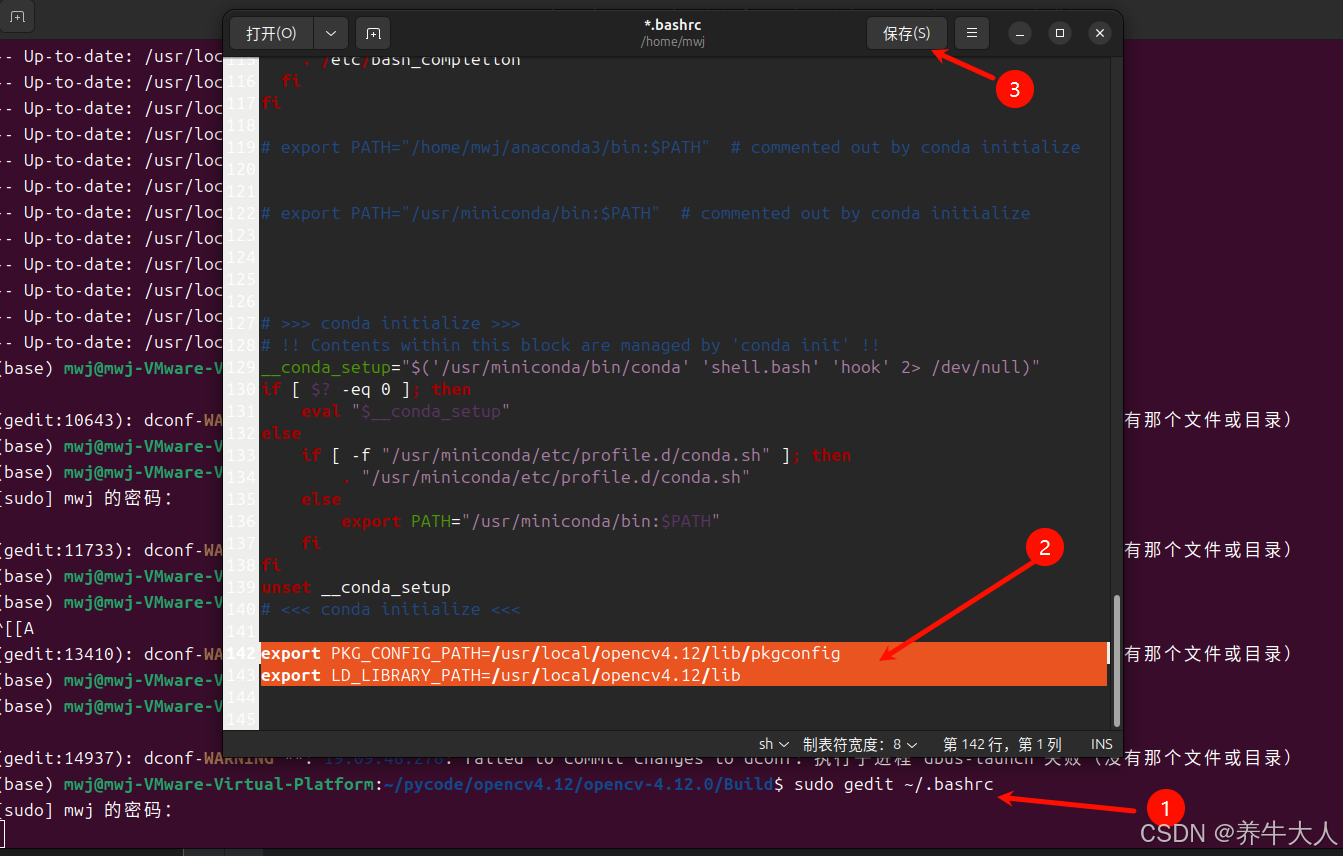
保存之后,再执行命令source ~/.bashrc

以下是vscode中调用c++ opencv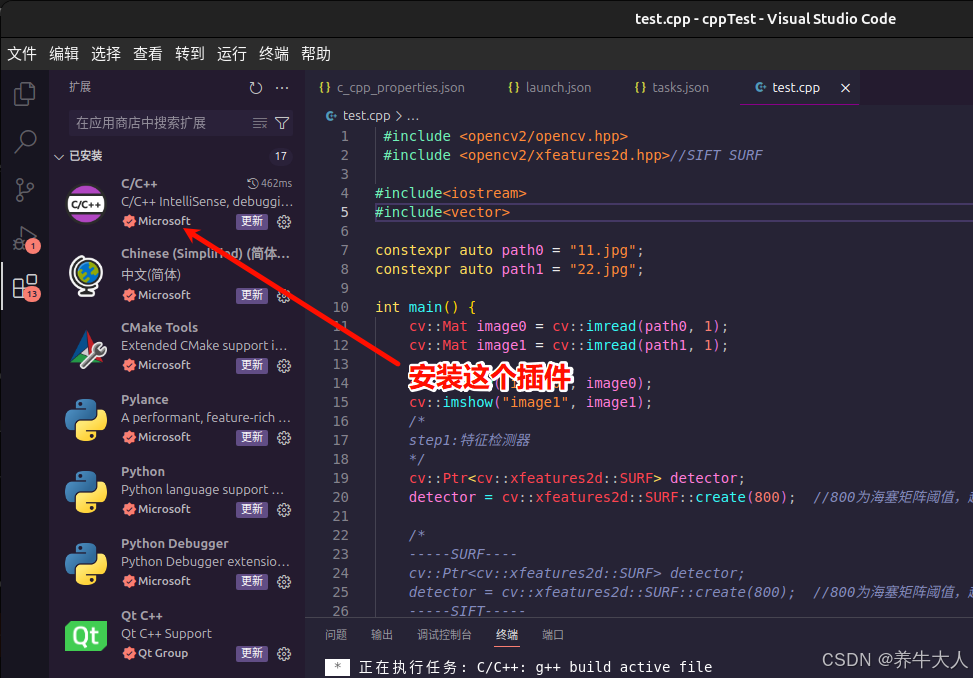
.vscode文件夹下面创建3个json (参考,根据实际路径修改)
c_cpp_properties.json
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/usr/local/opencv4.12/include/opencv4"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "gnu++14",
"intelliSenseMode": "linux-gcc-x64"
}
],
"version": 4
}launch.json
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "g++ - Build and debug active file",
"type": "cppdbg",
"request": "launch",
"program": "${fileDirname}/${fileBasenameNoExtension}", //程序文件路径
"args": [], //程序运行需传入的参数
"stopAtEntry": false,
"cwd": "${fileDirname}",
"environment": [],
"externalConsole": true, //运行时是否显示控制台窗口
"MIMode": "gdb",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
],
"preLaunchTask": "C/C++: g++ build active file",
"miDebuggerPath": "/usr/bin/gdb"
}
]
}tasks.json
{
"tasks": [
{
"type": "cppbuild",
"label": "C/C++: g++ build active file", /* 与launch.json文件里的preLaunchTask的内容保持一致 */
"command": "/usr/bin/g++",
"args": [
"-std=c++11",
"-g",
"${file}", /* 编译单个文件 */
// "${fileDirname}/*.cpp", /* 编译多个文件 */
"-o",
"${fileDirname}/${fileBasenameNoExtension}", /* 输出文件路径 */
/* 项目所需的头文件路径 */
"-I","${workspaceFolder}/",
"-I","/usr/local/opencv4.12/include/",
"-I","/usr/local/opencv4.12/include/opencv4/",
"-I","/usr/local/opencv4.12/include/opencv4/opencv2",
/* 项目所需的库文件路径 */
"-L", "/usr/local/opencv4.12/lib",
/* OpenCV的lib库 */
"/usr/local/opencv4.12/lib/libopencv_*"
],
"options": {
"cwd": "${fileDirname}"
},
"problemMatcher": [
"$gcc"
],
"group": {
"kind": "build",
"isDefault": true
},
"detail": "Task generated by Debugger."
}
],
"version": "2.0.0"
}
如果有qt也可以配置到qt中,当然和qt结合使用的话,编译的时候最好with_qt选项打勾
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D INSTALL_C_EXAMPLES=OFF \
-D INSTALL_PYTHON_EXAMPLES=OFF \
-D ENABLE_FAST_MATH=ON \
-D BUILD_opencv_java=OFF \
-D BUILD_ZLIB=ON \
-D BUILD_TIFF=ON \
-D WITH_GTK=ON \
-D WITH_FFMPEG=ON \
-D WITH_1394=ON \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D OPENCV_PC_FILE_NAME=opencv4.pc \
-D OPENCV_ENABLE_NONFREE=ON \
-D WITH_GSTREAMER=ON \
-D WITH_V4L=ON \
-D WITH_QT=ON \
-D WITH_OPENGL=ON \
-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib/modules \
-D BUILD_EXAMPLES=ON ..qt中.pro文件夹中的设置:
# 以下是opencv的引用
INCLUDEPATH += /usr/local/opencv4.12/include\
/usr/local/opencv4.12/include/opencv4 \
/usr/local/opencv4.12/include/opencv4/opencv2
LIBS += /usr/local/opencv4.12/lib/libopencv_*.so \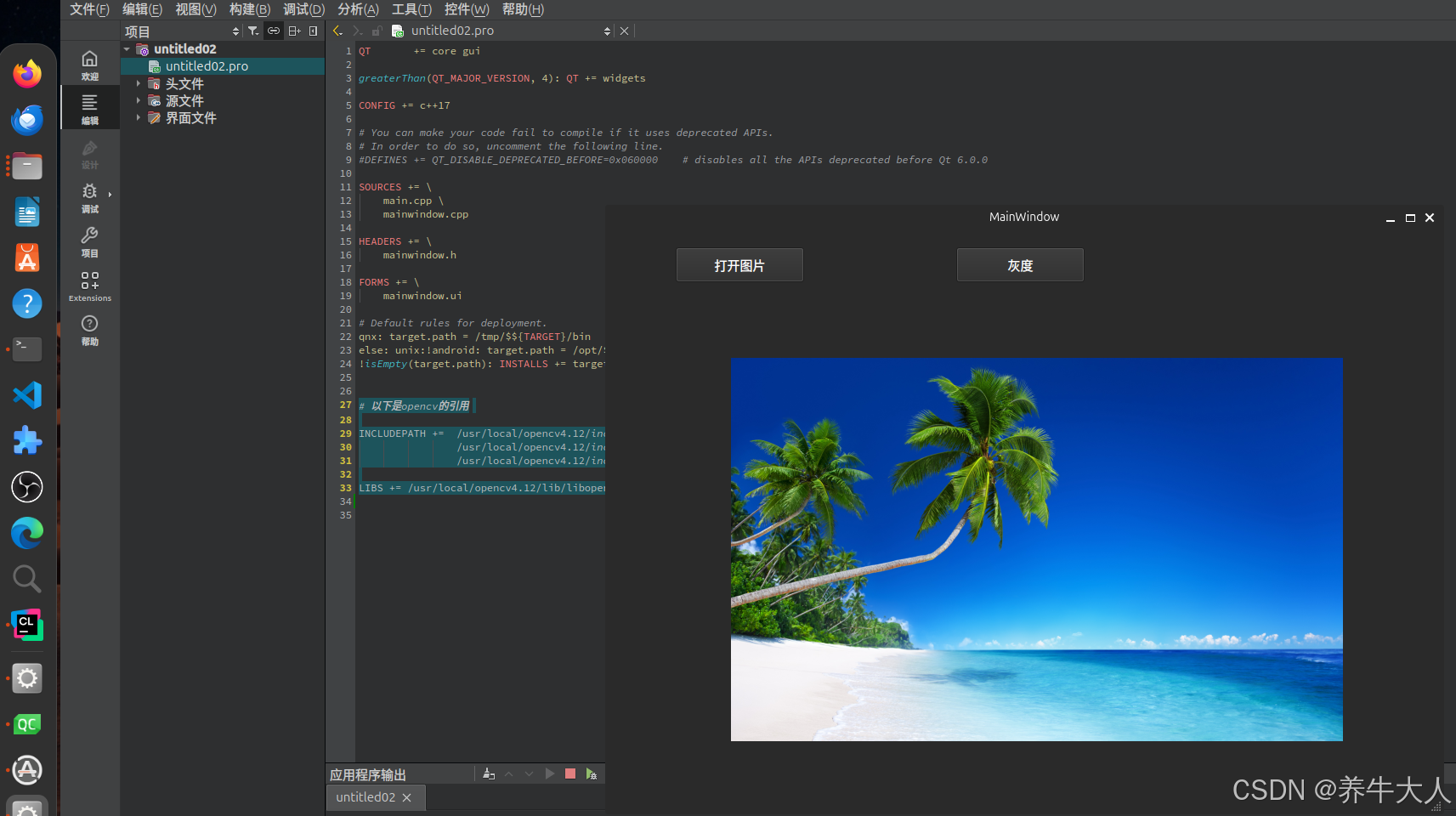
扩展思考:pkg-config --modversion opencv4 这个命令是从哪里获取opencv版本的
pkg-config --modversion opencv4
是通过 opencv4.pc 这个文件来获取 OpenCV 的版本信息的。
📌 它的工作原理如下:
✅ 1. pkg-config 是一个工具
它用于管理库的编译和链接参数,比如:
- 库的版本号(如你看到的
4.12.0) - 编译时需要加的头文件路径(
-I/usr/local/opencv4.12/include/opencv4) - 链接时需要加的库路径和库名(
-L/usr/local/opencv4.12/lib -lopencv_core ...)
pkg-config 会去环境变量 PKG_CONFIG_PATH 指定的路径中查找名为 opencv4.pc 的文件。
你可以用这个命令查看它到底用了哪个 .pc 文件:
小技巧:验证 .pc 文件是否被正确使用
# 查看 .pc 文件路径
pkg-config --variable pcfiledir opencv4
# 输出示例: # /usr/local/opencv4.12/lib/pkgconfig
如果提示: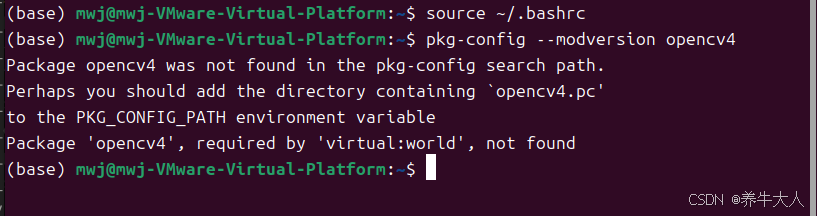
可以设置变量,根据自己的opencv生成位置
先打开 sudo gedit ~/.bashrc
export PKG_CONFIG_PATH=/usr/local/opencv4.12/lib/pkgconfig
export LD_LIBRARY_PATH=/usr/local/opencv4.12/lib
更新配置:
source ~/.bashrc
# 查看完整配置内容 pkg-config --dump opencv4
以下是opencv4.pc内容
# Package Information for pkg-config
prefix=/usr/local/opencv4.12
exec_prefix=${prefix}
libdir=${exec_prefix}/lib
includedir=${prefix}/include/opencv4
Name: OpenCV
Description: Open Source Computer Vision Library
Version: 4.12.0
Libs: -L${exec_prefix}/lib -lopencv_gapi -lopencv_stitching -lopencv_alphamat -lopencv_aruco -lopencv_bgsegm -lopencv_bioinspired -lopencv_ccalib -lopencv_dnn_objdetect -lopencv_dnn_superres -lopencv_dpm -lopencv_face -lopencv_freetype -lopencv_fuzzy -lopencv_hdf -lopencv_hfs -lopencv_img_hash -lopencv_intensity_transform -lopencv_line_descriptor -lopencv_mcc -lopencv_quality -lopencv_rapid -lopencv_reg -lopencv_rgbd -lopencv_saliency -lopencv_signal -lopencv_stereo -lopencv_structured_light -lopencv_phase_unwrapping -lopencv_superres -lopencv_optflow -lopencv_surface_matching -lopencv_tracking -lopencv_highgui -lopencv_datasets -lopencv_text -lopencv_plot -lopencv_videostab -lopencv_videoio -lopencv_viz -lopencv_wechat_qrcode -lopencv_xfeatures2d -lopencv_shape -lopencv_ml -lopencv_ximgproc -lopencv_video -lopencv_xobjdetect -lopencv_objdetect -lopencv_calib3d -lopencv_imgcodecs -lopencv_features2d -lopencv_dnn -lopencv_flann -lopencv_xphoto -lopencv_photo -lopencv_imgproc -lopencv_core
Libs.private: -ldl -lm -lpthread -lrt
Cflags: -I${includedir}新增情况说明 :
如果用的是ubuntu22.04
运行c++ opencv可能有以下提示:
The function is not implemented. Rebuild the library with Windows, GTK+ 2.x or Cocoa support. If you are on Ubuntu or Debian, install libgtk2.0-dev and pkg-config
这种情况 可能要先重新
sudo apt-get install libgtk2.0-dev
ubuntu22的话估计 自动会装到libgtk2.1
编译之前应该运行过以下命令(难道单独执行和多个库一起执行有区别?)
sudo apt-get install libgtk2.0-dev libgtk-3-dev libglib2.0-dev libavcodec-dev libavformat-dev libswscale-dev libavutil-dev libv4l-dev liblapacke-dev libxvidcore-dev libx264-dev
不管如何当我重新执行 sudo apt-get install libgtk2.0-dev 后,再重新 编译 生成 就正常了

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)