ROS脚本自动化开发工具:提高ROS 4.X版本开发效率
ROS,即Robot Operating System,是一个用于机器人软件开发的灵活框架。它提供了一套工具和服务,让开发者可以更轻松地创建复杂且可重复使用的机器人行为。ROS以其模块化和可重用性特点,受到了学术界和工业界的广泛青睐。ROS脚本生成器的起源可以追溯到ROS社区对自动化工具的需求。在早期,机器人开发人员需要手动编写大量的脚本代码,以支持各种硬件和软件之间的通信。为了提高开发效率,减少

简介:ROS脚本生成器是为ROS系统开发的辅助工具,旨在简化脚本创建过程,并为初学者降低学习难度。该生成器允许通过交互式界面快速生成节点、消息、服务和参数配置等ROS脚本组件。它提供的节点生成、消息定义、服务生成和参数管理等功能,使得开发者能专注于实现机器人高级功能,同时提高了开发效率和代码质量。此外,该工具可能还包含了与RouterOS交互的功能,增强了ROS在物联网和智能硬件领域的应用潜力。 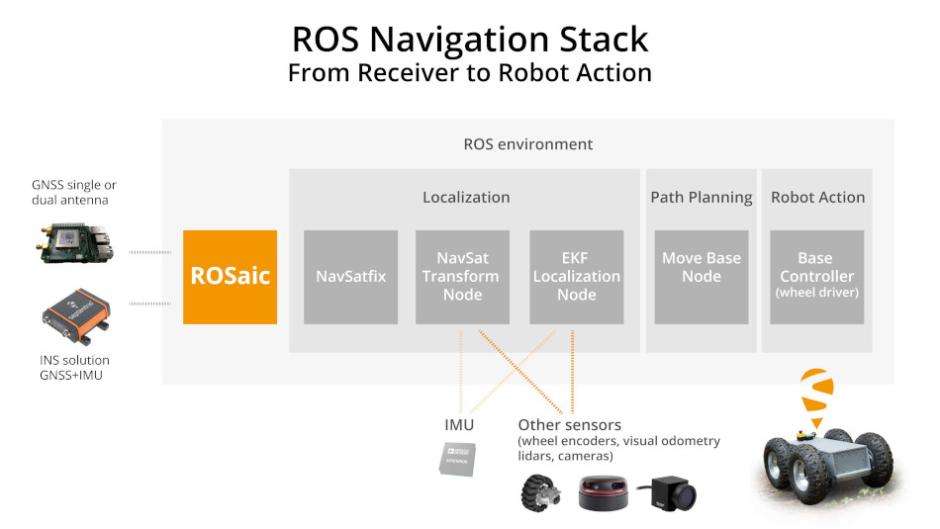
1. ROS系统介绍
ROS简介
ROS,即Robot Operating System,是一个用于机器人软件开发的灵活框架。它提供了一套工具和服务,让开发者可以更轻松地创建复杂且可重复使用的机器人行为。ROS以其模块化和可重用性特点,受到了学术界和工业界的广泛青睐。
历史与发展
ROS最初由斯坦福人工智能实验室的斯坦利团队开发,后由威尔·罗杰斯带领下的Willow Garage公司进行进一步的开发和推广。自2007年发布以来,ROS经历了数个版本的迭代,如今已是机器人编程领域中不可或缺的一部分。
核心理念与架构
ROS系统架构由几个关键概念组成,包括节点(Node)、主题(Topic)、服务(Service)、消息(Message)和包(Package)等。这些抽象层允许开发者专注于具体功能的实现,而无需担心底层的实现细节,极大地降低了机器人开发的难度。ROS的分布式架构使得不同开发者可以协作开发,共享资源,这是它能快速发展的核心因素之一。
graph LR
A[ROS Core] -->|消息通信| B[节点]
B -->|发布| C[主题]
B -->|服务请求| D[服务]
通过上述流程图,我们可以看到ROS核心如何管理节点间的主题发布与服务请求,这是实现复杂机器人行为的关键。在后续章节中,我们将深入了解这些概念的实际应用,以及如何通过ROS脚本生成器进一步优化开发流程。
2. ROS脚本生成器简介
2.1 ROS脚本生成器的发展历程
2.1.1 ROS系统中脚本生成器的起源
ROS脚本生成器的起源可以追溯到ROS社区对自动化工具的需求。在早期,机器人开发人员需要手动编写大量的脚本代码,以支持各种硬件和软件之间的通信。为了提高开发效率,减少重复劳动,脚本生成器应运而生。其初衷是为了简化ROS节点间的通信和消息处理流程。
2.1.2 脚本生成器的发展里程碑
随着ROS技术的演进,脚本生成器经历了几个关键的发展阶段。最初,它只是作为一个简单的命令行工具存在,能够根据用户定义的参数生成基础的Python脚本。之后,脚本生成器集成了图形用户界面,使其更加用户友好,并增加了更多的高级功能,比如动态消息创建和节点管理。近年来,脚本生成器已经能够自动生成整个ROS包,并为不同类型的消息和主题提供了广泛的模板支持。
2.2 ROS脚本生成器的基本功能和优势
2.2.1 功能概述
ROS脚本生成器的核心功能包括快速生成节点、消息和服务脚本,以及为这些脚本提供自动化的测试和部署支持。它的另一个关键功能是集成第三方库支持,这允许开发者在ROS项目中使用非标准库,而无需手动配置依赖关系。此外,它还提供了代码模板管理功能,允许用户创建和使用自定义模板,以满足特定项目需求。
2.2.2 相对于传统脚本编写的优势
与传统手动编写脚本相比,ROS脚本生成器极大地提高了开发效率。传统的编写方式要求开发者具备深入了解ROS架构和编程语言,而使用脚本生成器,即使是初学者也能快速上手ROS开发。脚本生成器通过预定义的模板和参数化输入,可以迅速生成模板代码,开发者只需在此基础上进行少量的定制和调整即可。这种做法不仅加快了开发流程,也减少了因重复编码导致的潜在错误。
接下来将具体讨论ROS脚本生成器用户界面和交互性。
3. 脚本生成器用户界面和交互性
3.1 用户界面的布局与设计理念
3.1.1 人性化界面设计的考量
在设计ROS脚本生成器的用户界面时,考虑到了用户体验和易用性。首先,界面应该直观,减少用户的学习成本。通过使用清晰的标签、图标以及反馈,用户可以快速了解各个组件的作用。布局方面,考虑到了操作的顺序性,将最常用的工具和功能放置在最容易触及的位置。此外,提供快捷键和鼠标拖放功能也是为了提高工作效率。
3.1.2 各功能模块的交互逻辑
各个功能模块之间的交互是通过可视化工具和配置向导来实现的。举个例子,用户可以通过简单的点击和拖拽来组织脚本的结构,或者通过配置向导填写必要的参数来生成特定的服务。为了防止错误操作,系统在关键步骤提供了必要的验证和提示信息,确保用户在进行下一步操作前已经正确设置了所有必要的选项。
3.2 用户交互性分析
3.2.1 界面元素的交互响应
用户界面的设计需要保证各种界面元素,如按钮、输入框、和列表等,都有明确的视觉反馈和交互效果。例如,当用户点击一个按钮时,按钮会以不同的颜色或形状变化来表示其已被激活。当用户输入数据并触发验证逻辑时,如果输入不符合要求,系统应该立即给予反馈,指明错误所在并提供改正建议。
flowchart LR
A[开始使用脚本生成器] --> B[界面元素响应]
B --> C{是否输入数据}
C --> |是| D[数据验证]
C --> |否| E[提示用户输入数据]
D --> F{数据是否有效}
F --> |是| G[继续生成脚本]
F --> |否| H[显示错误信息]
H --> E
3.2.2 交互过程中的用户体验优化
为了优化用户体验,脚本生成器的用户界面会根据用户的操作习惯和偏好来动态调整其展示内容和操作流程。系统会记忆用户上一次的操作,以便在用户再次使用时能够快速地提供之前常用的功能。同时,用户可以定制界面布局和快捷操作,从而提高效率。
graph TD
A[打开脚本生成器] --> B[加载用户配置]
B --> C{用户是否自定义界面}
C --> |是| D[应用用户自定义设置]
C --> |否| E[使用默认布局和设置]
D --> F[继续操作流程]
E --> F
通过本章节的介绍,我们可以了解到一个优秀的用户界面是如何通过人性化的考虑、清晰的交互逻辑以及优化的用户体验来提升脚本生成器整体的易用性和效率的。随着ROS脚本生成器的不断进步和更新,用户界面和交互性方面的改善也会是其中的重点。
4. 自动化脚本生成的关键技术
自动化脚本生成在提升开发效率和准确性方面起着至关重要的作用。本章节深入探讨了自动化脚本生成的核心技术,包括节点自动生成功能、消息定义创建功能和服务生成代码,详细解读它们的工作原理和如何在ROS系统中得到应用。
4.1 节点自动生成功能
节点是ROS系统中最小的可执行单元,节点的自动化生成极大提升了系统的模块化和代码的复用性。
4.1.1 节点生成的机制与原理
节点自动生成的机制与原理主要基于模板生成和参数填充技术。在ROS脚本生成器中,开发者首先定义一个节点的模板,这个模板包含节点的标准结构和必要的ROS集成代码。当需要创建新节点时,生成器会根据用户输入的信息(如节点名称、功能描述等),对模板进行参数化处理,动态生成新的节点代码。
这个过程通常包括以下几个步骤:
- 定义节点模板:在脚本生成器中定义一个节点代码的模板,这包括节点类的定义、初始化代码、发布和订阅的设置等。
- 用户输入信息:用户通过脚本生成器的界面输入新节点的相关信息。
- 模板填充:脚本生成器根据用户输入的信息,动态地替换模板中的占位符,生成实际的节点代码。
- 代码验证:自动生成的代码需要经过一定的验证过程,确保其可编译且功能正确。
4.1.2 实际应用场景分析
自动化节点生成技术在实际的ROS项目中有着广泛的应用。以机器人导航系统为例,开发团队可能需要创建多个用于不同传感器数据处理的节点。如果手动编写这些节点,不仅效率低下,而且容易出错。利用自动化节点生成器,团队可以快速创建出标准化、可复用的节点代码,大幅减少开发时间和提高代码质量。
例如,创建一个激光雷达数据处理节点:
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twist
class ScanProcessor:
def __init__(self):
self.subscriber = rospy.Subscriber("/scan", LaserScan, self.scan_callback)
self.publisher = rospy.Publisher("/cmd_vel", Twist, queue_size=10)
def scan_callback(self, data):
# 处理激光扫描数据
# 发布到命令主题的控制指令
cmd = Twist()
# ... 设置cmd的线速度和角速度
self.publisher.publish(cmd)
if __name__ == '__main__':
rospy.init_node('laser_scan_processor', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
# ... 处理逻辑 ...
rate.sleep()
上述代码是一个典型ROS节点的结构,自动化生成器可以基于这种结构快速生成新的节点实例。
4.2 消息定义创建功能
消息在ROS中用于节点间通信,消息定义创建功能是自动化脚本生成的重要组成部分。
4.2.1 消息定义的重要性
消息定义是ROS节点间通信的基础。一个良好的消息定义可以明确描述通信内容的结构,保证信息传递的清晰和准确。通过自动化工具生成消息定义,可以减少人为错误,确保消息格式的一致性。
4.2.2 自动化创建过程详解
自动化创建消息定义的过程也依赖于模板和参数化技术。首先,系统定义了一个消息模板,包含所有可能的消息字段。用户通过脚本生成器的界面指定消息名称和字段后,系统自动替换模板中的内容,生成消息定义文件。
自动化创建过程通常包含以下几个步骤:
- 定义消息模板:在脚本生成器中,定义消息的模板文件,通常这些文件包含所有可能的消息字段。
- 用户输入信息:用户通过脚本生成器输入新消息的名称和需要包含的字段。
- 模板填充:系统将用户提供的信息填充到模板中,生成具体的消息定义。
- 验证消息定义:生成的消息定义需要被验证以确保其符合ROS消息格式的要求,并且能被编译和使用。
举例来说,如果需要创建一个关于机器人的速度控制的消息,消息定义可能如下:
# Velocity.msg
float32 linear_x
float32 angular_z
一旦消息被创建,它就可以被用于发布和订阅,实现节点间的通信。
4.3 服务生成代码
服务是ROS中提供请求/响应交互的机制。服务生成代码是自动化脚本生成的另一个关键部分,它涉及服务端和客户端代码的自动生成。
4.3.1 服务功能在ROS中的作用
在ROS中,服务(Service)允许一个节点作为服务端提供特定的功能,其他节点可以作为客户端发起请求,服务端执行完毕后会返回响应。服务功能的应用场景包括但不限于任务请求、数据检索、执行特定命令等。
4.3.2 服务代码生成的智能化实现
服务生成代码的智能化实现依赖于模板和自动化工具。服务端和客户端的代码模板被预定义在脚本生成器中。用户仅需指定服务名称、请求和响应类型等信息,生成器即可生成完整的服务和客户端代码。
服务生成的过程包括:
- 定义服务模板:创建服务请求和响应的模板文件。
- 用户输入信息:用户输入服务名称和请求及响应类型。
- 模板填充:系统根据用户输入的信息替换模板中的占位符,生成服务定义和服务客户端代码。
- 验证服务代码:确保生成的服务代码可以编译并且在实际使用中能够正确处理请求和响应。
举个例子,如果用户需要创建一个获取当前时间和日期的服务,生成的服务定义可能如下:
# GetTime.srv
int32 year
int32 month
int32 day
int32 hour
int32 minute
int32 second
bool success
通过上述步骤,自动化脚本生成器能够快速、准确地为用户创建出功能完整的节点、消息和服务代码,极大地简化了ROS系统开发的复杂性,提升了开发效率和项目质量。
5. 脚本生成器的集成与管理功能
5.1 参数管理简化配置
随着脚本生成器的复杂性增加,对参数的管理也变得更加重要。参数管理是脚本生成器集成与管理功能中必不可少的一环,它确保了用户能够在不同的环境和配置中,通过简化配置来快速部署脚本。
5.1.1 参数管理的必要性
在ROS系统中,参数管理是用来保证各个节点在初始化和运行时能够获得正确的配置信息。例如,网络配置、传感器参数设置等,这些通常需要根据不同环境进行调整。一个好的参数管理系统可以极大地简化系统的配置工作,提高部署的效率和可维护性。
5.1.2 集成参数管理的实现策略
参数管理的实现策略可以分为几个关键步骤:
- 参数读取 :使用
ros::NodeHandle或ros::param来读取参数,这些可以通过ROS参数服务器预先设定。 - 参数存储 :参数可以存储在YAML或XML文件中,便于版本控制和修改。
- 参数验证 :参数加载后,进行有效性检查,确保参数值在合理范围内。
- 参数更新机制 :提供热更新机制,以支持系统运行中参数的更改而无需重启。
示例代码块展示如何从参数服务器读取参数:
#include <ros/ros.h>
#include <std_msgs/String.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "param_example");
ros::NodeHandle nh;
// 从参数服务器读取参数
std::string my_param;
if (nh.getParam("my_parameter", my_param)) {
ROS_INFO("Retrieved parameter: %s", my_param.c_str());
} else {
ROS_WARN("Could not retrieve parameter 'my_parameter'");
}
ros::spin();
return 0;
}
该代码块首先初始化了ROS节点,并尝试从参数服务器读取名为 my_parameter 的参数。如果读取成功,它会输出参数值;如果失败,则输出警告信息。
5.2 工作空间集成和脚本导入
工作空间是ROS开发的基本单位,它包含了包(packages)、依赖关系和配置等。集成工作空间和自动化脚本导入是提高开发效率的关键。
5.2.1 工作空间的概念与集成
工作空间通常通过 catkin_make 或 colcon 来构建,其中包含一个或多个ROS包。在集成工作空间时,需要自动化以下步骤:
- 检测现有工作空间环境。
- 新建工作空间或添加包到现有工作空间。
- 自动解决依赖关系。
5.2.2 脚本导入与管理的自动化
自动化脚本导入通常涉及以下几个步骤:
- 脚本文件检测 :自动搜索脚本文件或者由用户指定脚本目录。
- 依赖关系解析 :分析脚本中使用的ROS主题、服务和消息类型,并自动安装所需的包。
- 导入脚本 :将脚本文件拷贝到适当的位置,并进行编译。
示例流程图展示脚本导入自动化过程:
graph LR
A[开始导入] --> B{检测脚本文件}
B -->|有新脚本| C[解析依赖]
B -->|无新脚本| Z[结束]
C --> D[安装依赖包]
D --> E[拷贝脚本到工作空间]
E --> F[编译脚本]
F --> Z
5.3 RouterOS交互支持
RouterOS是一种广泛使用的路由系统,与脚本生成器集成可以实现更深入的网络管理和自动化功能。
5.3.1 RouterOS的集成意义
集成RouterOS支持的目的是为了:
- 实现脚本生成器与RouterOS的直接交互。
- 自动化网络设备配置和管理。
- 提供跨平台、跨设备的ROS解决方案。
5.3.2 脚本生成器与RouterOS的交互机制
脚本生成器与RouterOS的交互通常涉及以下几个步骤:
- 初始化连接 :通过SSH或API与RouterOS建立连接。
- 设备状态查询 :查询设备运行状态、配置参数等。
- 配置更改和部署 :根据脚本内容,更改配置并应用到RouterOS设备上。
- 错误处理与日志记录 :在交互过程中记录操作日志,并提供错误处理机制。
例如,下面是通过SSH连接到RouterOS设备并执行命令的Python代码示例:
import paramiko
# 初始化SSH客户端
ssh = paramiko.SSHClient()
ssh.set_missing_host_key_policy(paramiko.AutoAddPolicy())
# 连接到RouterOS设备
ssh.connect('router_ip', username='admin', password='password')
# 执行RouterOS命令
stdin, stdout, stderr = ssh.exec_command('/system print')
print(stdout.read())
ssh.close()
该代码段创建了SSH客户端,连接到RouterOS设备,并执行了打印系统状态的命令。输出结果将显示在终端上。
通过集成与管理功能的深入探讨,我们看到脚本生成器在提高开发效率、简化配置以及设备管理方面的重要作用。接下来的章节将探讨脚本生成器在高级场景下的应用以及优化策略。
简介:ROS脚本生成器是为ROS系统开发的辅助工具,旨在简化脚本创建过程,并为初学者降低学习难度。该生成器允许通过交互式界面快速生成节点、消息、服务和参数配置等ROS脚本组件。它提供的节点生成、消息定义、服务生成和参数管理等功能,使得开发者能专注于实现机器人高级功能,同时提高了开发效率和代码质量。此外,该工具可能还包含了与RouterOS交互的功能,增强了ROS在物联网和智能硬件领域的应用潜力。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 21
21 0
0- 0



 已为社区贡献168条内容
已为社区贡献168条内容

所有评论(0)