【完整强化学习Ubuntu环境安装教程】下载ubunt20.04系统iso镜像、制作系统盘、安装系统、更换pip镜像、安装cuda、cudnn、pytorch、gymnasium、
1 制作系统盘
(1)下载
https://releases.ubuntu.com/20.04.6/
选择 ubuntu-20.04.6-desktop-amd64.iso下载
(2)制作系统盘
https://rufus.ie/zh/
使用 Rufus 制作系统盘(推荐)
Rufus 是一款免费开源的小工具,制作过程非常直观。
下载并运行 Rufus:从其官网或可信渠道下载最新版,打开软件。
设备选择:插入U盘,Rufus 通常会自动识别。如果没有,请手动选择正确的U盘设备。
选择镜像:点击“选择”按钮,找到并打开你下载的 Ubuntu 20.04 ISO 文件。
分区类型:在“分区类型”处,建议选择 MBR(针对 BIOS 或 UEFI-CSM 启动的电脑)。如果你的电脑是较新的 UEFI 启动模式,也可以选择 GPT。
开始写入:确认设置无误后,点击“开始”按钮。软件会提示数据将被销毁,确认后便会开始写入镜像。耐心等待直到提示“准备就绪”或“刻录完成”。
2 安装系统
U盘插入电脑,电脑启动后按F2或F1进入Bios界面,选择启动选项,选择从U盘启动
执行默认安装。全部选择默认选项执行。
3 安装中文输入法
下载安装包
https://shurufa.sogou.com/linux

(2)根据官方安装教程,先配置再安装包。注意对于新系统,比如ubuntu24.04输入法是不支持的。
https://shurufa.sogou.com/linux/guide
3 安装miniconda
下载适用于64位系统的 Miniconda安装脚本
wget https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/Miniconda3-latest-Linux-x86_64.sh
使用 bash命令执行下载的脚本。
bash Miniconda3-latest-Linux-x86_64.sh
安装程序初始化后,需要重新启动终端或使用 source命令使更改生效。
source ~/.bashrc
4 配置pip镜像
在 Ubuntu 系统上将 pip 源更换为阿里云镜像,可以显著提升包的下载速度。以下是具体的配置方法,分为永久配置和临时使用两种方式。
永久配置后,每次使用 pip 安装包都会默认从阿里云镜像获取,在终端中依次执行以下两条命令即可:
pip config set global.index-url https://mirrors.aliyun.com/pypi/simple/
pip config set global.trusted-host mirrors.aliyun.com
这个命令会自动在您的用户目录下创建正确的配置文件。
5 安装cuda
ctrl+alt+T打开终端,终端执行命令“nvidia-smi”,查看cuda版本
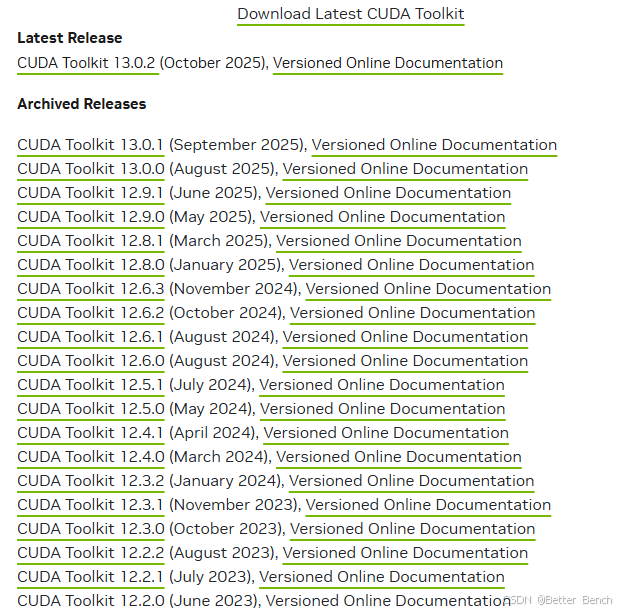
在以下cuda官网,选择对应版本的cuda 下载,ubuntu20.04一般选择12.6
https://developer.nvidia.com/cuda-toolkit-archive
6 安装cudnn
官网最新的cudnn安装方式,建议通过针对每个conda环境安装。以下是多种方式,任选其一。
,不再是通过复制文件的方式来全局安装。
先通过conda创建环境
conda create -n py310 python=3.10
激活conda
conda activate py310
然后在conda环境中安装cudnn
conda install nvidia::cudnn cuda-version=12
docker pull nvidia/cuda:12.8.1-cudnn-devel-ubuntu22.04
pip install nvidia-cudnn
pip install nvidia-cudnn-frontend
7 pytorch
选择linux、以上对应安装的cuda版本
https://pytorch.org/get-started/locally/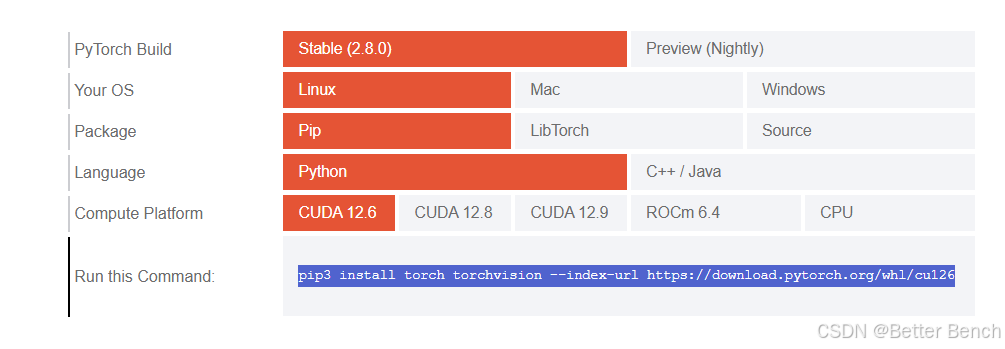
pip3 install torch torchvision --index-url https://download.pytorch.org/whl/cu126
8 gymnasium
强化学习API库,OpenAI Gym 的社区继承版,为强化学习研究和开发提供了大量标准化的仿真环境接口,例如经典控制问题、Atari 游戏。
pip install gymnasium
9 stable_baseline3
强化学习常见算法库,这是一个基于 PyTorch 实现的、集成了多种先进且可靠的强化学习算法(如 PPO、DQN)的库,旨在让算法的复现和应用变得更加稳定和便捷
pip install stable-baselines3
简单例子
import gymnasium
from stable_baselines3 import PPO
env = gymnasium.make("CartPole-v1", render_mode="human")
model = PPO("MlpPolicy", env, verbose=1)
model.learn(total_timesteps=10_000)
vec_env = model.get_env()
obs = vec_env.reset()
for i in range(1000):
action, _states = model.predict(obs, deterministic=True)
obs, reward, done, info = vec_env.step(action)
vec_env.render()
# VecEnv resets automatically
# if done:
# obs = vec_env.reset()
10 mujoco 仿真环境
MuJoCo(Multi-Joint dynamics with Contact)是一个专注于多关节系统接触动力学的高性能物理引擎,在机器人仿真、生物力学和强化学习等领域应用广泛
pip install mujoco
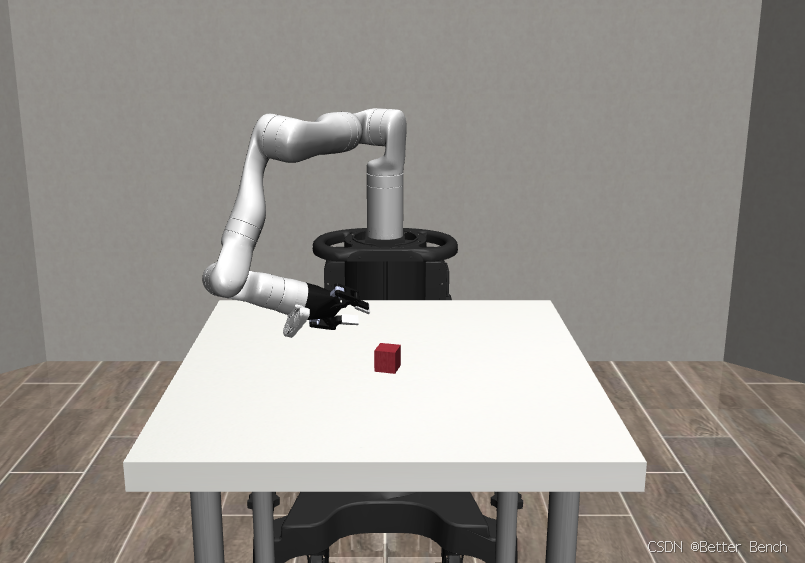
11 robosuite任务场景
这是一个基于 MuJoCo 物理引擎构建的机器人仿真框架,提供了丰富的预定义机器人模型(如机械臂)和任务场景,专门用于机器人操控任务的强化学习与模仿学习研究
git clone https://github.com/ARISE-Initiative/robosuite.git
cd robosuite
# (可选)切到v1.5.1以获得与robomimic示例最匹配的版本:
git checkout v1.5.1
# 安装依赖
pip install -r requirements.txt
# 安装 robosuite(可选)
pip install -e .
简单例子
# test_kinova3.py
import robosuite as suite
import numpy as np
# 创建一个简单的 Lift 环境,机器人换成 Kinova3
env = suite.make(
env_name="Lift", # robosuite 提供的任务名,如 Lift、PickPlace、Door 等
robots="Kinova3", # 使用 Kinova3 机械臂
has_renderer=True,
has_offscreen_renderer=False,
use_camera_obs=False
)
obs = env.reset()
print("reset obs keys:", obs.keys() if isinstance(obs, dict) else type(obs))
# 随机动作演示若控制器可用:
for _ in range(200):
action = np.random.uniform(env.action_spec[0], env.action_spec[1])
obs, reward, done, info = env.step(action)
env.render()
env.close()
12 robomimic模仿学习算法库
这是一个专注于机器人模仿学习的框架,支持行为克隆、生成对抗模仿学习等多种方法,并能与 robosuite 无缝协作,利用专家演示数据来训练机器人策略
conda create -n robomimic python=3.10.0 -y
conda activate robomimic
git clone https://github.com/ARISE-Initiative/robomimic.git
cd robomimic
pip install -e .

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 23
23 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)