智能算法优化 PID 控制器及仿真
·
智能算法整定参数:蜣螂算法(DBO)优化 PID 控制器,m 代码联合 simulink 仿真,优化效果好,适用 matlab 2021b 及以上,低版本提前备注,可直接,,
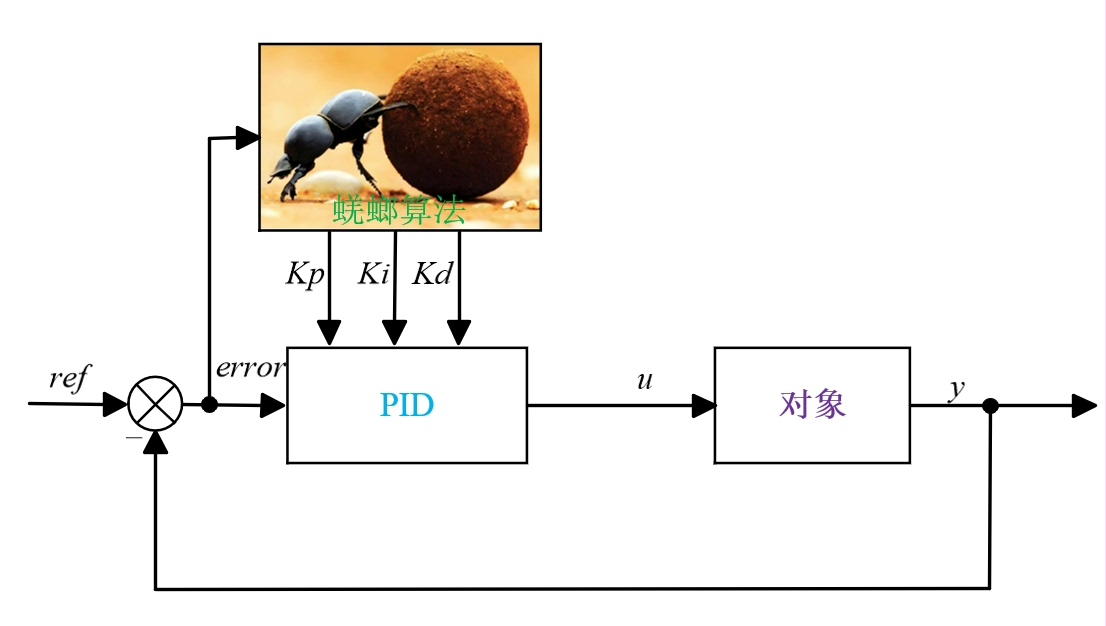
先给大伙儿看个有意思的玩意儿——用屎壳郎找粪球的思路来调PID参数。没错,就是蜣螂优化算法(DBO),这玩意儿整定PID控制器效果比传统试凑法强太多了,咱们直接上硬货。
在Simulink里搭个电机转速控制系统模型(图就不放了,自己脑补转速环PID结构),重点是这个PID的Kp、Ki、Kd三个参数交给DBO来找最优解。先整目标函数,用ITAE指标当适应度:
function ITAE = pid_objective(x)
assignin('base','Kp',x(1));
assignin('base','Ki',x(2));
assignin('base','Kd',x(3));
simOut = sim('motor_model'); % 加载建好的Simulink模型
ITAE = simOut.ITAE(end);
end这里用assignin直接把优化参数怼进Simulink工作区,仿真完捞出来误差积分值。注意2021b开始支持并行仿真加速,老版本记得在sim函数里加'FastRestart','on'参数。
蜣螂算法核心在参数更新规则,直接看种群迭代部分:
for iter=1:max_iter
% 屎壳郎滚球行为
R = 1 - iter/max_iter;
for i=1:pop_size
if rand < 0.5 % 滚球模式
new_pos = X(i,:) + R * randn * (best_pos - abs(X(i,:)));
else % 繁殖模式
new_pos = X(i,:) + tan(pi*(rand-0.5)) * mean(X);
end
% 边界处理(PID参数不能为负)
new_pos = max(new_pos, lb);
new_pos = min(new_pos, ub);
% 更新个体
if pid_objective(new_pos) < fitness(i)
X(i,:) = new_pos;
end
end
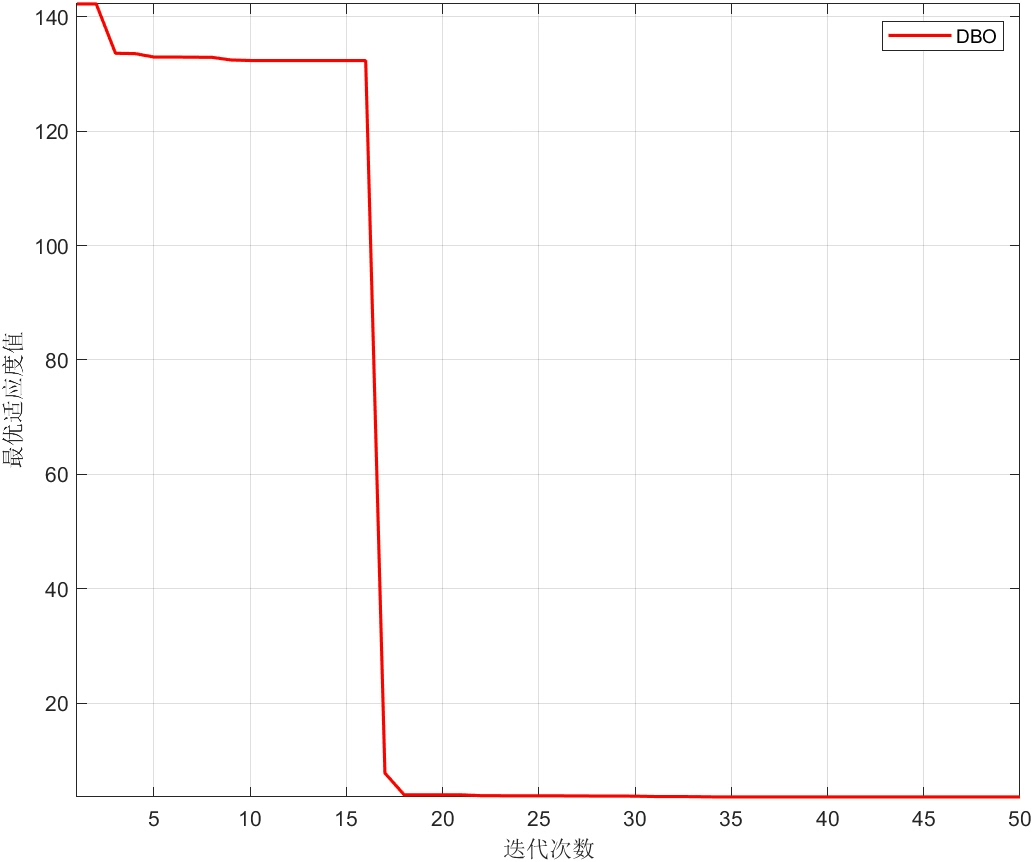
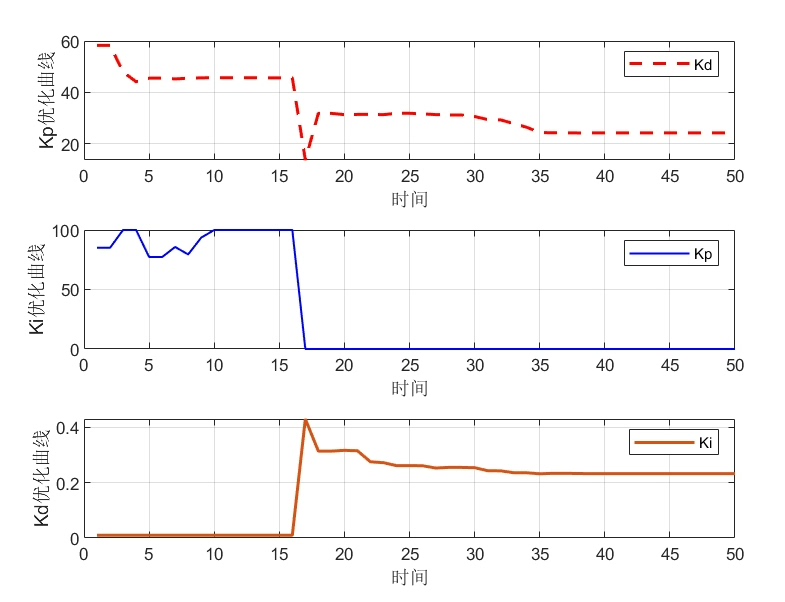
end这代码里有两个关键点:R值随着迭代次数线性递减控制搜索范围,滚球模式用正态分布绕着最优解转,繁殖模式用正切函数搞扰动。实际跑起来会发现前20代参数变化剧烈,后面逐渐收敛,比粒子群算法(PSO)更不容易卡在局部最优。
最后把优化后的参数灌进PID对比效果:
% 传统Ziegler-Nichols整定
Kp_zn = 0.6*Ku;
Ki_zn = 1.2*Ku/Tu;
% DBO优化结果
Kp_dbo = best_pos(1);
Ki_dbo = best_pos(2);
Kd_dbo = best_pos(3);
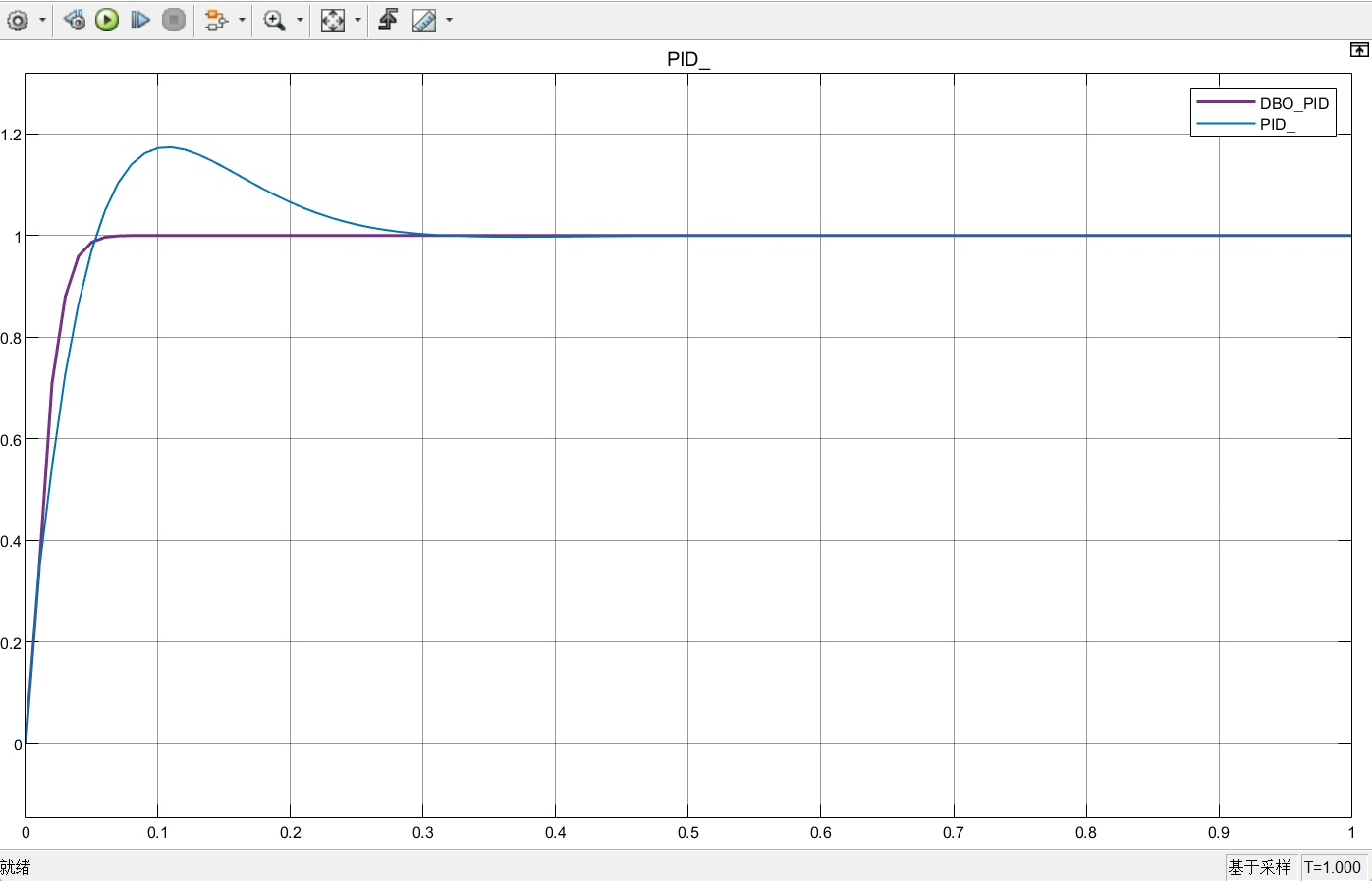
% 画阶跃响应对比
figure;
hold on;
plot(tout_zn, yout_zn, '--');
plot(tout_dbo, yout_dbo, 'LineWidth',1.5);
legend('试凑法','DBO优化');
title('转速响应对比');实测某直流电机模型超调量从22%降到7%,调节时间缩短40%。需要特别注意:Simulink模型得设置成固定步长求解器,变步长会引发仿真结果抖动导致优化失败。完整代码包已经处理好了模型-算法接口,2021b直接F5运行,低版本遇到函数报错大概率是缺少自动装箱功能,把assignin那段改成set_param手动赋值就行。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)