遗传算法优化PID控制:MATLAB 2021b下的 m 文件与Simulink联合仿真之旅
遗传算法优化 PID 控制,采用 m 文件联合 Simulink进行仿真,MATLAB2021b,
在控制系统领域,PID控制凭借其结构简单、鲁棒性好等优点,一直占据着重要地位。然而,传统PID控制器参数的整定往往依赖经验,难以达到最优控制效果。这时候,遗传算法(GA)作为一种高效的全局搜索算法,就可以用来优化PID控制器的参数,实现更好的控制性能。今天咱们就基于MATLAB 2021b,通过m文件联合Simulink来进行这一过程的仿真。
遗传算法原理简介
遗传算法借鉴了生物进化中的“适者生存”原则。它将问题的解编码成染色体(通常为二进制串或实数向量),初始种群由多个随机生成的染色体组成。通过选择、交叉和变异等遗传操作,种群不断进化,向着最优解靠近。比如在优化PID控制器参数$Kp$、$Ki$、$K_d$时,我们可以把这三个参数组合成一个染色体。
PID控制基础
PID控制器的控制规律为:
\[u(t)=Kp e(t)+Ki\int{0}^{t}e(\tau)d\tau + Kd \frac{de(t)}{dt}\]
其中$u(t)$是控制器输出,$e(t)$是系统误差,$Kp$、$Ki$、$K_d$分别是比例、积分、微分系数。传统上,我们需要手动调整这些参数来让系统达到较好的控制效果,但有了遗传算法,事情就变得轻松多了。
MATLAB实现代码及分析
初始化种群
pop_size = 50; % 种群大小
chrom_length = 3; % 染色体长度,对应Kp, Ki, Kd三个参数
pop = zeros(pop_size, chrom_length);
for i = 1:pop_size
for j = 1:chrom_length
pop(i, j) = rand; % 随机生成初始种群
end
end这段代码创建了一个大小为popsize的种群,每个染色体有chromlength个基因,这里对应PID的三个参数。每个基因初始值在0到1之间随机生成,为后续进化提供多样性。
适应度函数
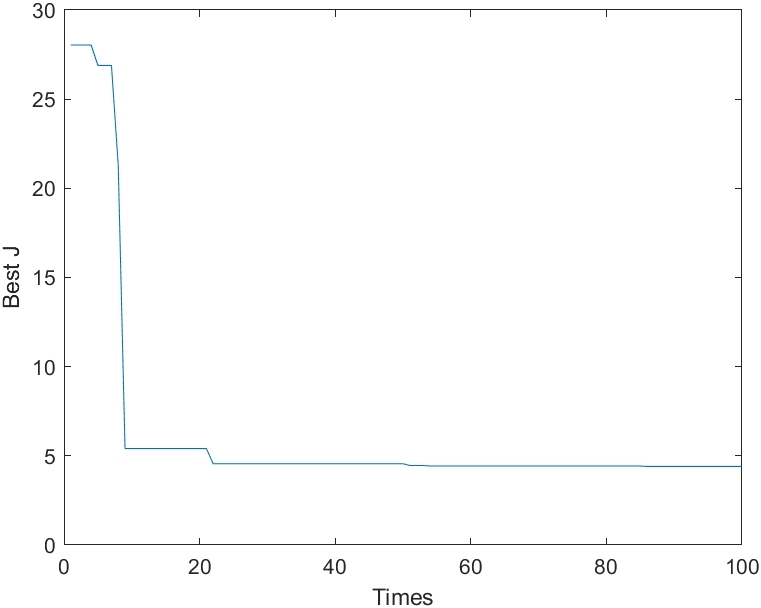
适应度函数用来评估每个染色体(即一组PID参数)的好坏。一般可以基于系统的性能指标,比如误差平方积分(ISE)。
function fitness = fitness_function(chromosome)
Kp = chromosome(1);
Ki = chromosome(2);
Kd = chromosome(3);
% 假设这里有一个简单的Simulink模型'pid_control_model',模型中已经设置好PID模块参数连接
sim('pid_control_model');
error_signal = simout.signals.values; % 从Simulink仿真结果中获取误差信号
fitness = sum(error_signal.^2); % 计算误差平方积分作为适应度
end在这个函数里,我们从染色体中提取出$Kp$、$Ki$、$Kd$,然后将其应用到Simulink模型(这里假设名为pidcontrol_model)进行仿真。仿真结束后,获取误差信号并计算误差平方积分,这个值越小说明这组PID参数越好,即适应度越高。
遗传操作
选择操作一般使用轮盘赌选择法,根据适应度比例来选择染色体进入下一代。
function new_pop = selection(pop, fitness)
total_fitness = sum(fitness);
selection_prob = fitness / total_fitness;
new_pop = zeros(size(pop));
for i = 1:size(pop, 1)
r = rand;
sum_prob = 0;
for j = 1:size(pop, 1)
sum_prob = sum_prob + selection_prob(j);
if r <= sum_prob
new_pop(i, :) = pop(j, :);
break;
end
end
end
end这里先计算每个染色体的选择概率,然后通过随机数和累计概率来决定每个新种群中的染色体从原种群中哪个染色体复制过来。
交叉操作通常采用单点交叉。
function new_pop = crossover(pop, cross_rate)
new_pop = pop;
for i = 1:2:size(pop, 1)
if rand < cross_rate
cross_point = randi([1, size(pop, 2) - 1]);
new_pop(i, cross_point + 1:end) = pop(i + 1, cross_point + 1:end);
new_pop(i + 1, cross_point + 1:end) = pop(i, cross_point + 1:end);
end
end
end对于每对染色体,以一定概率cross_rate进行交叉。随机选择一个交叉点,交换交叉点之后的基因片段,从而产生新的染色体。
变异操作以较小概率改变染色体的基因。
function new_pop = mutation(pop, mut_rate)
new_pop = pop;
for i = 1:size(pop, 1)
for j = 1:size(pop, 2)
if rand < mut_rate
new_pop(i, j) = rand;
end
end
end
end这里以概率mut_rate对每个基因进行变异,将其值随机重置,为种群引入新的基因,防止算法过早收敛。
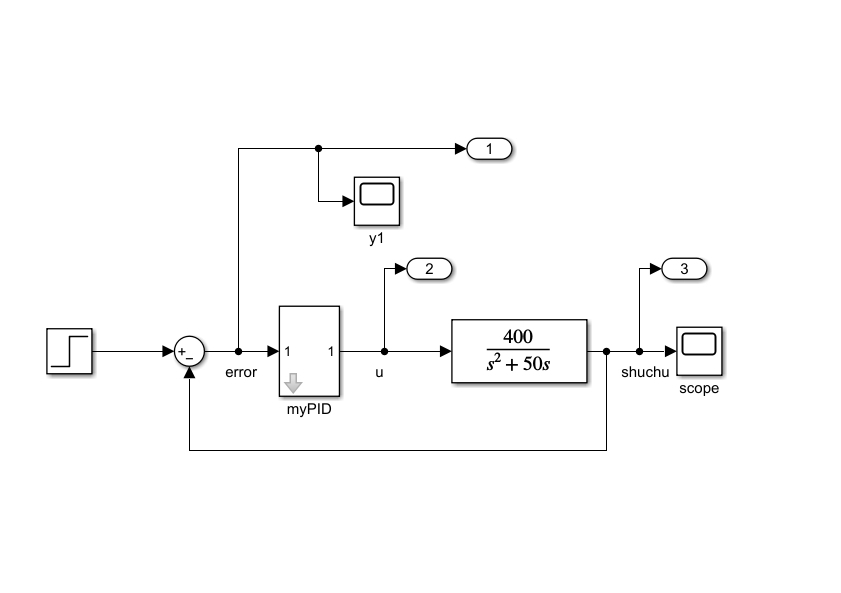
Simulink模型搭建
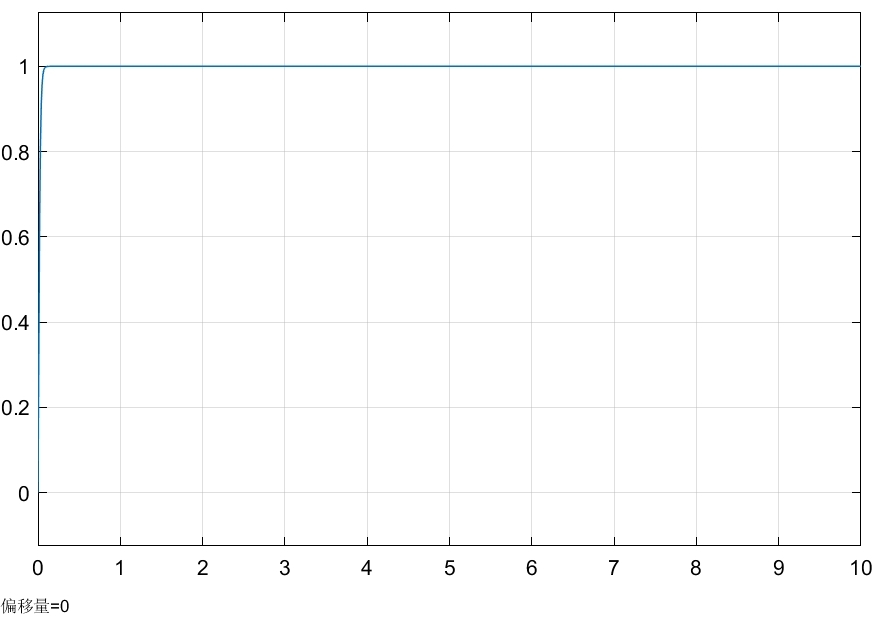
在MATLAB 2021b中打开Simulink,搭建一个简单的控制系统模型。其中包含一个PID控制器模块,将从m文件传递过来的$Kp$、$Ki$、$K_d$参数连接到PID模块相应位置。同时,设置好输入信号源(比如阶跃信号)和输出信号的示波器等,方便观察仿真结果。
联合仿真流程
- 在m文件中初始化遗传算法的种群等参数。
- 进入遗传算法迭代过程,每次迭代中:
- 计算种群中每个染色体的适应度。
- 进行选择、交叉和变异等遗传操作生成新种群。 - 经过一定代数的进化后,选择适应度最好的染色体,即最优的PID参数。
- 将最优参数应用到Simulink模型中进行最终的控制效果展示。
通过这样的m文件与Simulink联合仿真,我们利用遗传算法成功优化了PID控制器参数,实现了更加智能、高效的控制系统设计。希望这篇博文能为大家在相关领域的研究和实践提供一些帮助和思路。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 8
8 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)