传统ADRC与改进神经网络ADRC的永磁同步电机闭环控制仿真模型探索
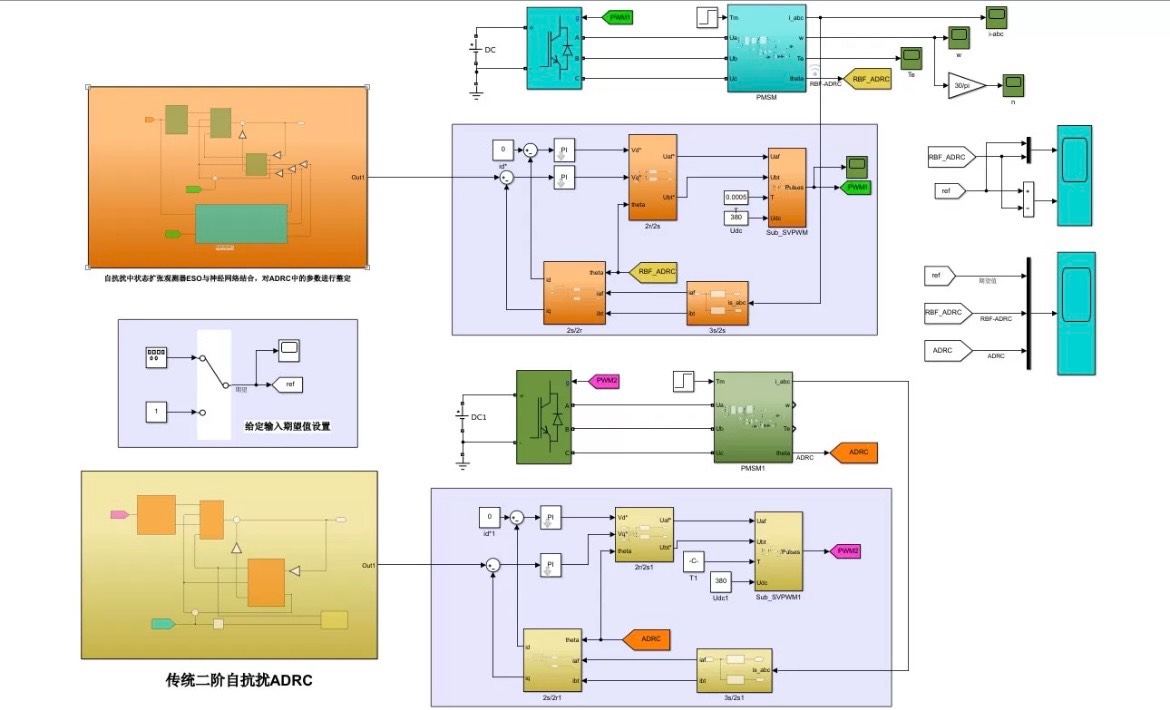
传统ADRC与改进神经网络ADRC的永磁同步电机闭环控制仿真模型 传统自抗扰PMSM:采用二阶自抗扰的位置电流双闭环控制 改进RBF自抗扰ADRC:自抗扰中状态扩张观测器ESO与神经网络结合,对ADRC中的参数进行整定 有搭建仿真过程的参考文献及ADRC控制器建模文档
在永磁同步电机(PMSM)控制领域,传统自抗扰控制(ADRC)与基于改进神经网络的ADRC不断演进,为电机高效稳定运行提供保障。今天就和大家聊聊这两种控制方式及其仿真模型搭建。
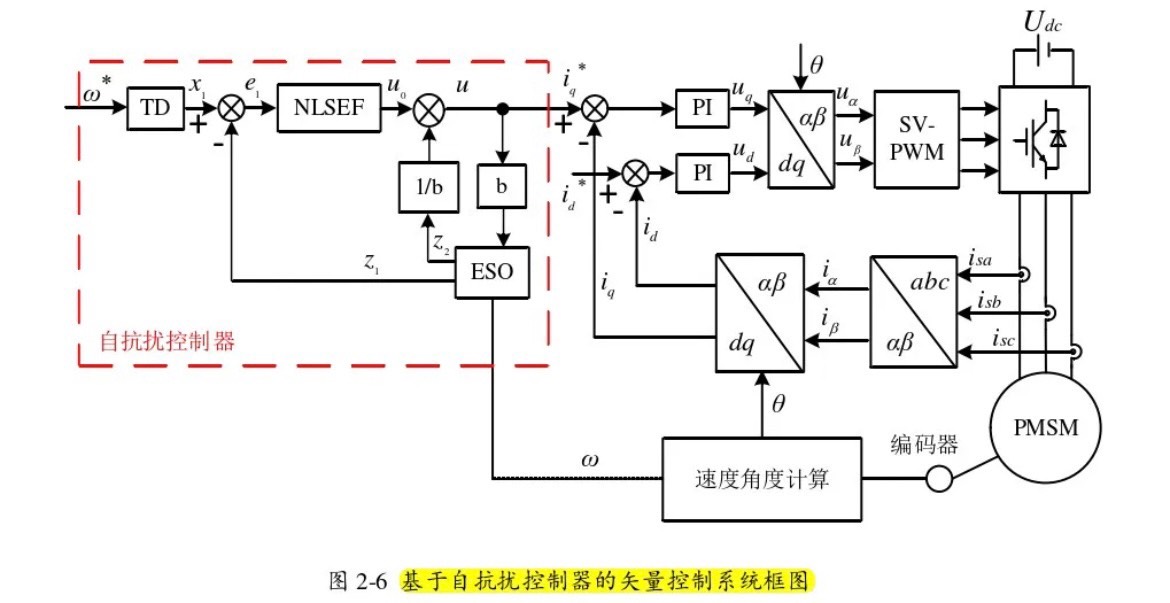
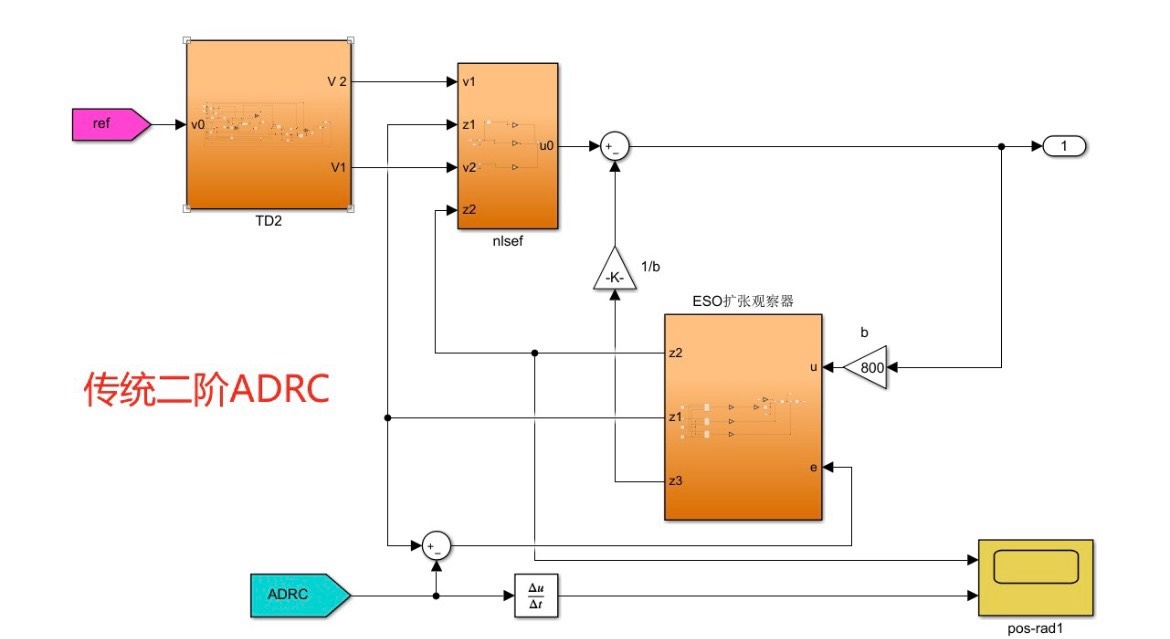
传统自抗扰PMSM
传统的自抗扰PMSM采用二阶自抗扰的位置电流双闭环控制。简单来说,位置环和电流环相互配合,电流环负责快速跟踪电流指令,位置环则保证电机转子位置准确跟踪给定值。
咱们先看看电流环部分代码示例(以Matlab为例):
% 电流环参数设置
kp_i = 0.5;
ki_i = 10;
% 电流环PI控制器
function [i_q_ref] = current_loop(i_q, i_q_ref, omega, dt)
global kp_i ki_i;
% 计算电流误差
error_i = i_q_ref - i_q;
% 积分项更新
static_error_i = static_error_i + error_i * dt;
% 计算q轴电流指令
i_q_ref = kp_i * error_i + ki_i * static_error_i;
end在这段代码里,我们设置了电流环的比例系数 kpi 和积分系数 kii,通过PI控制器计算出q轴电流指令 iqref。利用电流误差 errori 来调整输出,积分项 staticerror_i 用于消除稳态误差。
位置环的代码与之类似,也是基于PI控制原理,通过位置误差来调整输出,保证电机准确运行到指定位置。
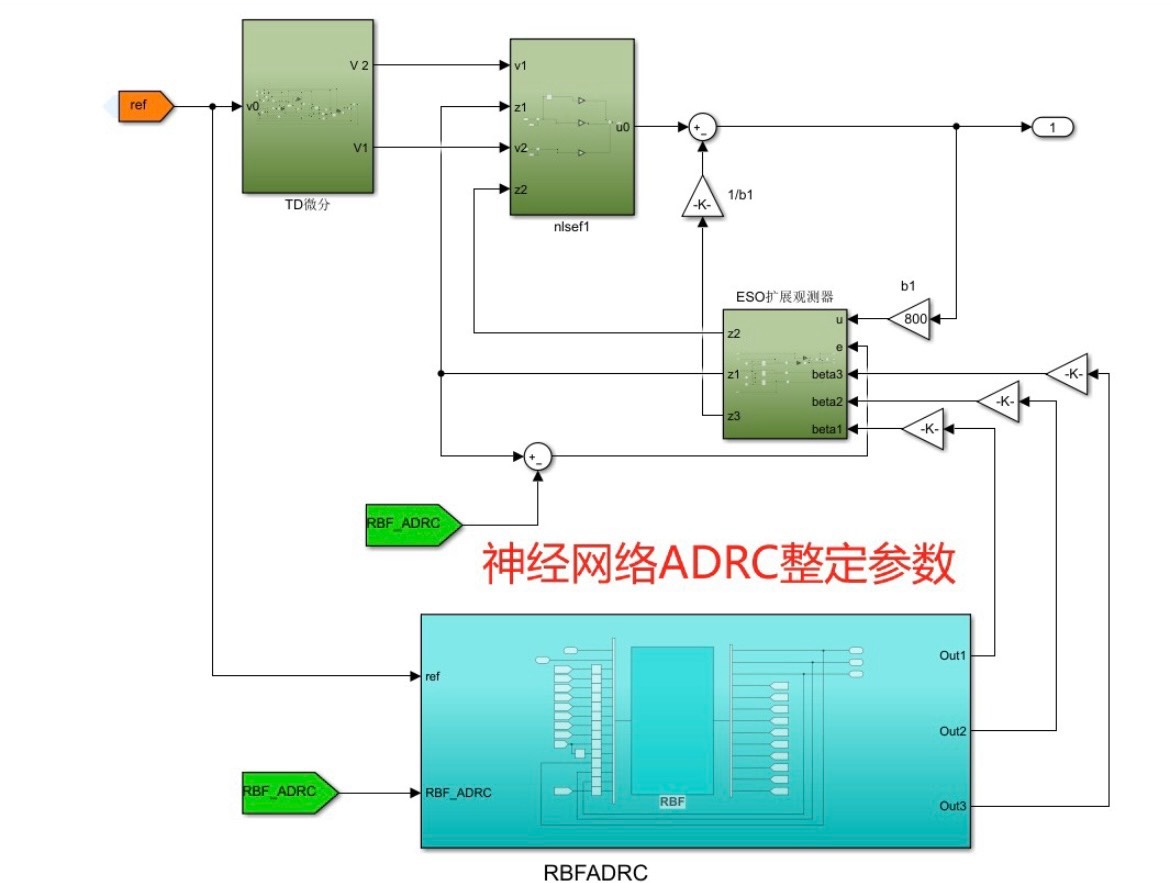
改进RBF自抗扰ADRC
改进的RBF自抗扰ADRC是将自抗扰中状态扩张观测器ESO与神经网络结合,对ADRC中的参数进行整定。这里以径向基函数神经网络(RBFNN)为例。
RBFNN可以逼近任意非线性函数,在ADRC里,我们利用它来优化ESO的参数。先看简单的RBFNN结构代码:
import numpy as np
class RBFNN:
def __init__(self, input_size, hidden_size, output_size):
self.input_size = input_size
self.hidden_size = hidden_size
self.output_size = output_size
# 初始化中心、宽度和权重
self.centers = np.random.rand(self.hidden_size, self.input_size)
self.widths = np.random.rand(self.hidden_size)
self.weights = np.random.rand(self.output_size, self.hidden_size)
def gaussian(self, x, center, width):
return np.exp(-np.linalg.norm(x - center) ** 2 / (2 * width ** 2))
def forward(self, x):
hidden_outputs = np.zeros(self.hidden_size)
for i in range(self.hidden_size):
hidden_outputs[i] = self.gaussian(x, self.centers[i], self.widths[i])
output = np.dot(self.weights, hidden_outputs)
return output在这段Python代码中,我们定义了一个简单的RBFNN类。init 方法初始化网络结构,包括输入层、隐藏层和输出层的大小,还有中心 centers、宽度 widths 和权重 weights。gaussian 方法是径向基函数,用于计算隐藏层节点的输出。forward 方法则实现了前向传播,计算网络的最终输出。
将这样的RBFNN与ESO结合,就能根据电机运行状态实时调整ADRC的参数,使得控制效果更加理想。比如,当电机负载突变时,RBFNN可以快速调整ESO的参数,让ADRC更好地估计和补偿扰动,维持电机稳定运行。
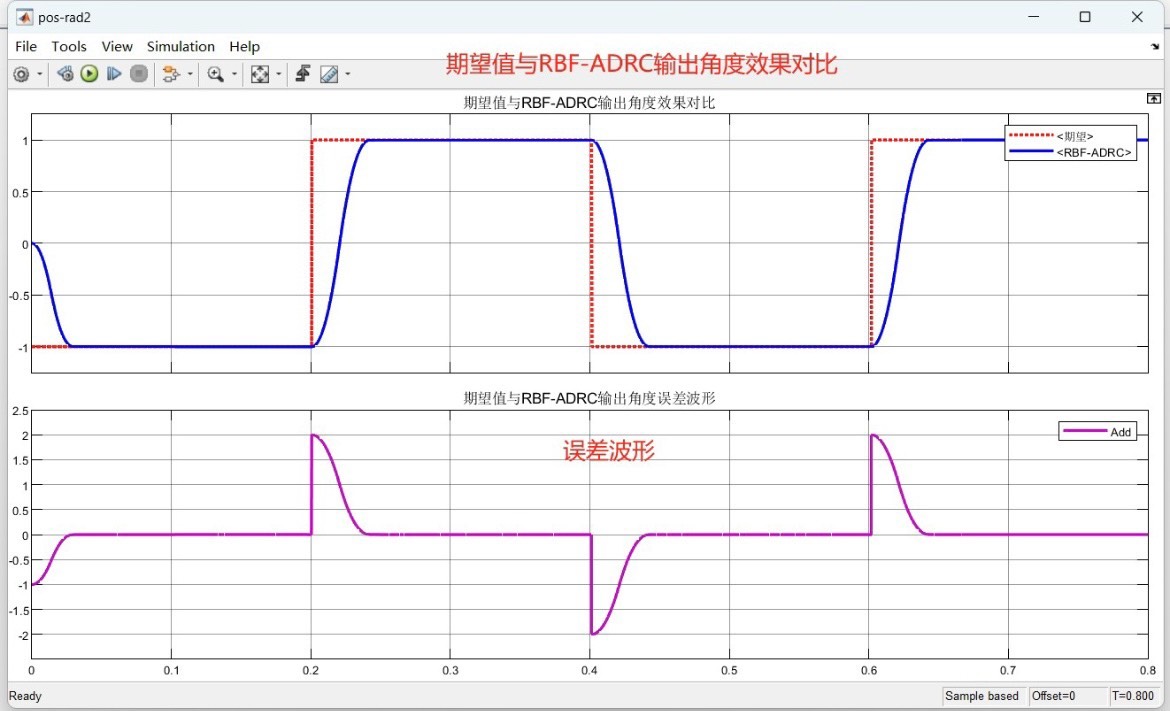
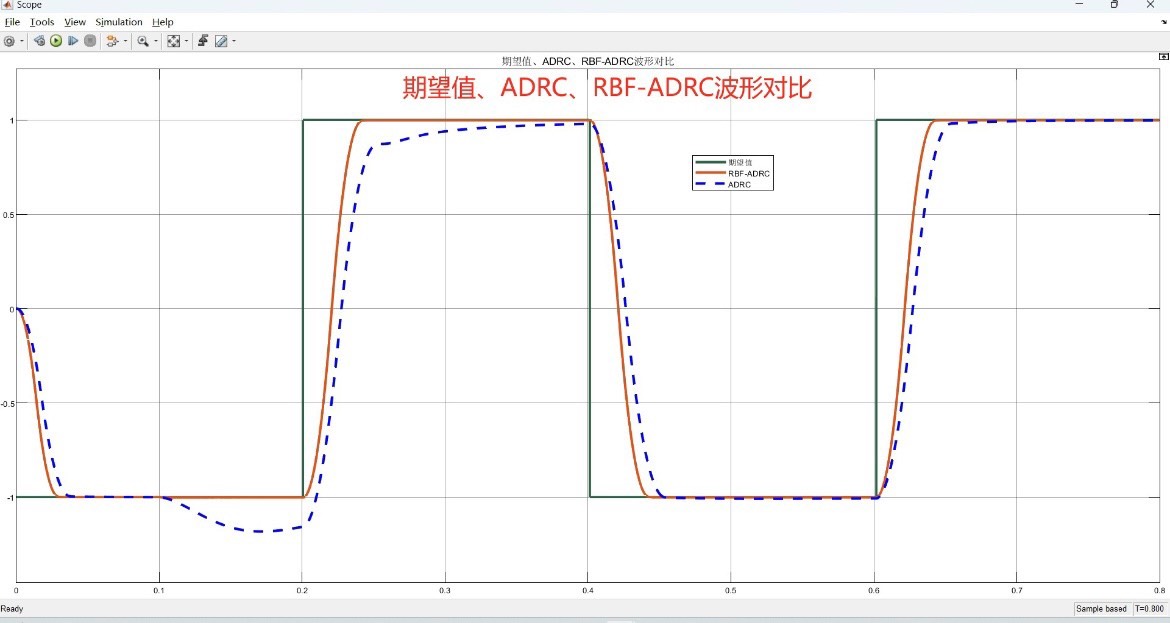
仿真搭建与资源
搭建这两种控制方式的仿真过程,可以参考相关参考文献,同时也有ADRC控制器建模文档助力。通过仿真,我们能直观看到传统ADRC和改进神经网络ADRC在PMSM闭环控制中的表现差异。在不同工况下,如负载变化、速度突变等,对比它们的转速响应、转矩波动等指标,从而更深入理解这两种控制策略的优缺点。
总之,无论是传统ADRC还是改进神经网络ADRC的永磁同步电机闭环控制仿真模型,都为电机控制领域的研究和实践提供了重要参考,不断推动着PMSM控制技术的进步。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 40
40 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)