神经网络PID控制BP_PID,模糊PID控制等Matlab/SImulink建模仿真
神经网络PID控制BP_PID,模糊PID控制等Matlab/SImulink建模仿真
PID控制作为经典算法,在工业界混了这么多年,现在居然和人工智能搞起了联名款。今天咱们就来扒一扒那些在MATLAB里整活的智能PID控制器,特别是神经网络PID和那个让人又爱又恨的模糊PID。
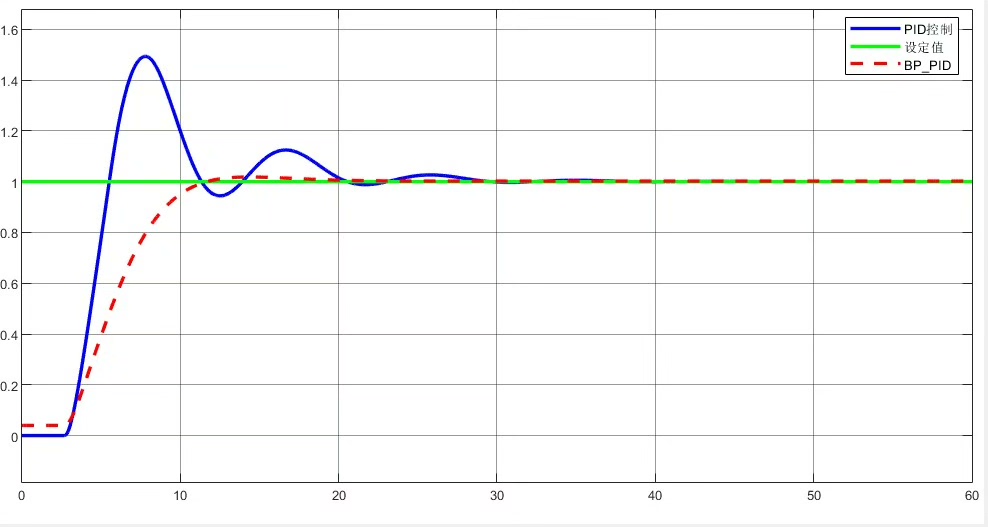
先看这个BP神经网络PID,说白了就是把PID参数交给神经网络当小弟。MATLAB里用nntool搞个三输入(误差、误差积分、误差微分)单输出的网络结构,训练数据就用传统PID跑出来的参数当参考答案。下面这段代码展示了怎么用新数据在线调参:
% 在线参数调整核心代码
while sim_time < 10
current_error = setpoint - actual_value;
pid_params = sim(net, [current_error; error_integral; error_derivative]);
% 这里暗藏玄机:输出层激活函数用正切保证参数有正负
Kp = pid_params(1) * 2; % 尺度变换
Ki = pid_params(2) * 0.1;
Kd = pid_params(3) * 0.5;
% 更新控制量
control_signal = Kp*current_error + Ki*error_integral + Kd*error_derivative;
error_integral = error_integral + current_error * dt;
end注意那个尺度变换没有?这就是实战经验——神经网络输出值域受限,直接套用会限制参数调整幅度。我在项目里吃过这个亏,系统响应慢得像树懒,后来加了这个缩放因子才活过来。
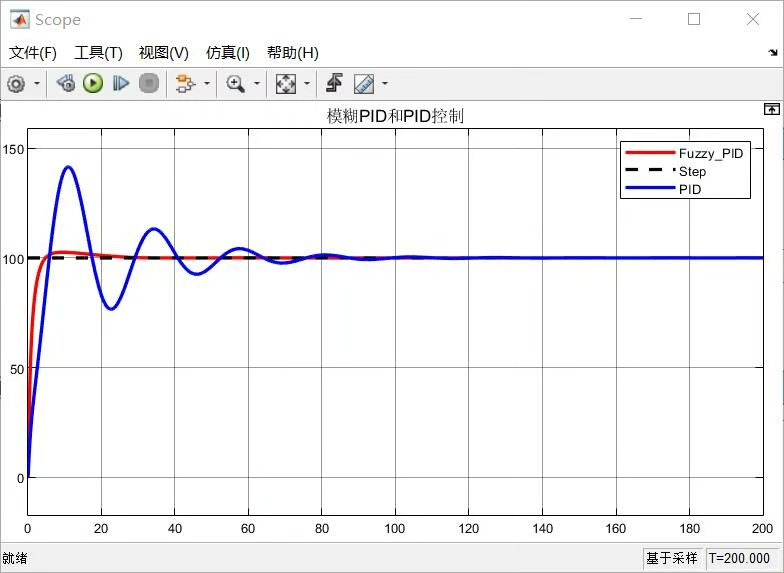
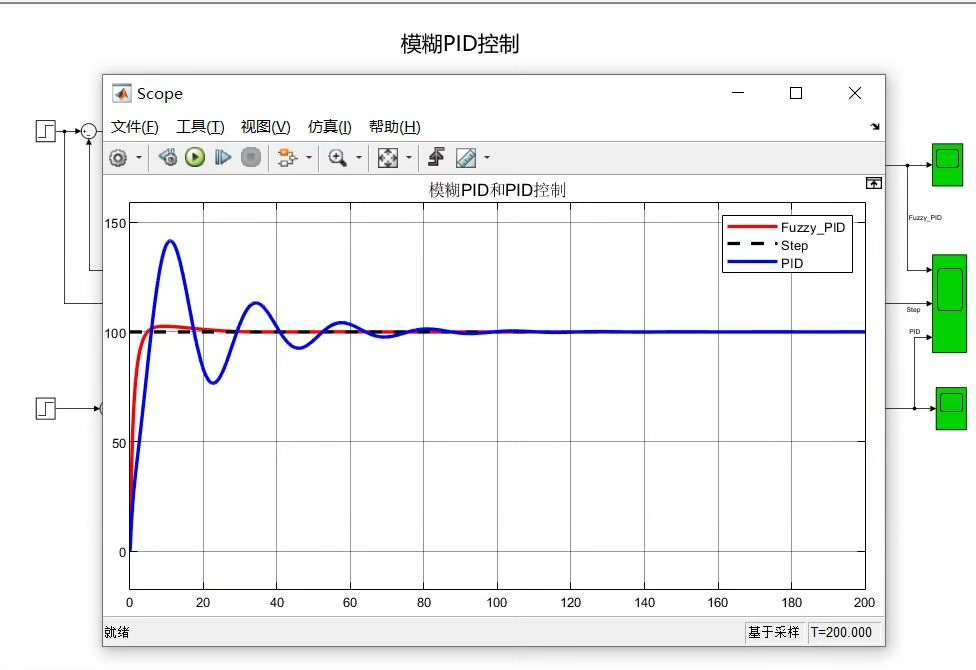
转场说说模糊PID,这玩意儿就是个"看心情调参"的主。在Simulink里拖个FIS编辑器,设定误差和误差变化的模糊集。重点在于规则库要带点"人性化",比如当误差大但正在快速减小时,就该让比例系数别那么激进:
fis = newfis('pid_tuner');
fis = addvar(fis,'input','error',[-1 1]);
fis = addmf(fis,'input',1,'NB','trapmf',[-1 -1 -0.8 -0.6]);
% ...(省略其他隶属度函数)
% 关键规则示例:误差正大且变化率负大时,给个中等Kp
ruleList = [3 3 2 2 1 1; % 这条规则调试了3小时...
2 2 1 2 1 1;
% ...其他规则
];
fis = addrule(fis,ruleList);仿真时常见坑点:模糊推理机选型。用Mamdani还是Sugeno?实际测试发现,Mamdani更适合参数整定,虽然计算量大点但曲线更平滑。曾经用错推理机导致控制量高频振荡,电机差点原地去世。
最后上硬货——Simulink联合仿真。把训练好的神经网络或模糊控制器打包成S函数,和物理模型对接。重点在于采样时间匹配,有一次忘记设固定步长,实时性直接崩盘。建议用Rate Transition模块做不同速率模块的桥梁。
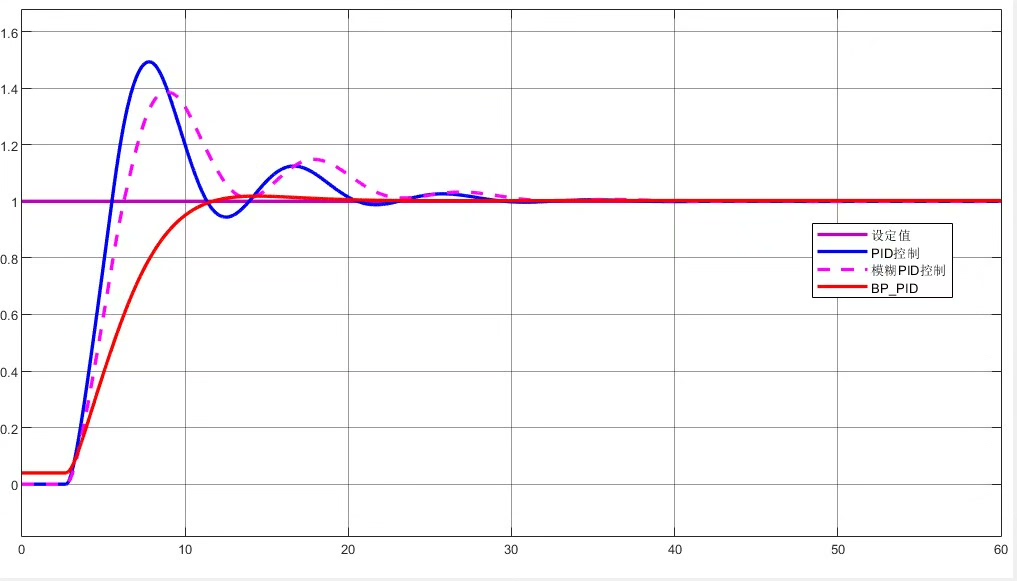
模型验证阶段别只看阶跃响应,试试扫频信号输入。某次项目验收时,甲方临时要求加个正弦追踪测试,传统PID当场翻车,神经网络PID靠着在线学习能力硬是撑住了场子——所以说,智能算法关键时刻真能救命。
智能PID不是银弹,但确实是传统方法卡壳时的开罐器。下次遇到难调的系统,不妨在Simulink里拖几个智能模块试试,说不定就有意外惊喜——当然,电脑配置不够的话,仿真时间可能会让你怀疑人生。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)