GA-PID:遗传算法优化PID参数整定
GA-PID,采用遗传算法优化PID参数,或者叫PID参数整定 matlab代码 PID和被控对象部分采用simulink搭建的
最近在研究用遗传算法(GA)来优化PID控制器的参数,感觉还挺有意思的,来和大家分享一下😃。
啥是GA-PID?
简单来说,GA-PID就是利用遗传算法对PID控制器的参数进行优化调整。传统的PID控制器参数整定往往需要一些经验或者反复调试,而遗传算法提供了一种智能的搜索方式,能够更高效地找到最优的PID参数组合,让控制系统性能更优。
Matlab代码部分
PID控制器部分代码
function [u, P, I, D] = pid_controller(Kp, Ki, Kd, e, e_prev, dt, integral)
P = Kp * e;
I = Ki * integral;
D = Kd * (e - e_prev) / dt;
u = P + I + D;
integral = integral + e * dt;
end这段代码实现了PID控制器的基本功能。它接收当前误差e、上一时刻误差e_prev、采样时间dt以及积分项integral,还有PID的三个参数Kp、Ki、Kd。通过计算比例项P、积分项I和微分项D,然后相加得到控制量u,同时更新积分项。
遗传算法部分代码
function [best_params, best_fitness] = genetic_algorithm()
population_size = 50;
num_generations = 100;
lower_bound = [0.1, 0.01, 0.01];
upper_bound = [10, 1, 1];
params = initial_population(population_size, lower_bound, upper_bound);
for generation = 1:num_generations
fitness = calculate_fitness(params);
[new_params, new_fitness] = selection(params, fitness);
new_params = crossover(new_params);
new_params = mutation(new_params, lower_bound, upper_bound);
params = new_params;
end
best_index = find(fitness == max(fitness));
best_params = params(best_index, :);
best_fitness = fitness(best_index);
end
function initial_population = initial_population(population_size, lower_bound, upper_bound)
initial_population = zeros(population_size, length(lower_bound));
for i = 1:population_size
for j = 1:length(lower_bound)
initial_population[i, j] = lower_bound(j) + (upper_bound(j) - lower_bound(j)) * rand();
end
end
end
function fitness = calculate_fitness(params)
% 这里要结合simulink模型,将params作为PID参数传入并获取性能指标作为fitness
% 假设我们这里简单用一个虚拟的计算来代替实际simulink运行
Kp = params(:, 1);
Ki = params(:, 2);
Kd = params(:, 3);
fitness = 1 / (Kp + Ki + Kd); % 简单示例,实际应根据simulink结果计算
end
function [new_params, new_fitness] = selection(params, fitness)
total_fitness = sum(fitness);
selection_prob = fitness / total_fitness;
selected_indices = randsample(size(params, 1), size(params, 1), true, selection_prob);
new_params = params(selected_indices, :);
new_fitness = fitness(selected_indices);
end
function new_params = crossover(new_params)
num_pairs = size(new_params, 1) / 2;
for i = 1:num_pairs
parent1 = new_params(2 * i - 1, :);
parent2 = new_params(2 * i, :);
crossover_point = randi(length(parent1));
child1 = [parent1(1:crossover_point), parent2(crossover_point + 1:end)];
child2 = [parent2(1:crossover_point), parent1(crossover_point + 1:end)];
new_params(2 * i - 1, :) = child1;
new_params(2 * i, :) = child2;
end
end
function new_params = mutation(new_params, lower_bound, upper_bound)
mutation_rate = 0.1;
num_params = size(new_params, 2);
for i = 1:size(new_params, 1)
for j = 1:num_params
if rand() < mutation_rate
new_params(i, j) = lower_bound(j) + (upper_bound(j) - lower_bound(j)) * rand();
end
end
end
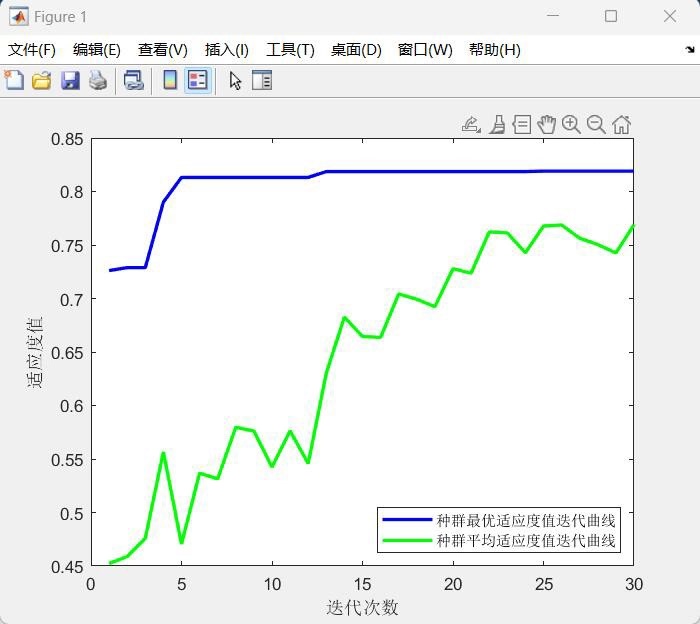
end这段遗传算法的代码定义了种群大小、迭代代数,以及参数的上下界。首先初始化种群,然后在每一代中计算适应度(这里是简单示例,实际要结合simulink结果),通过选择、交叉和变异操作来更新种群,最后找到最优参数。
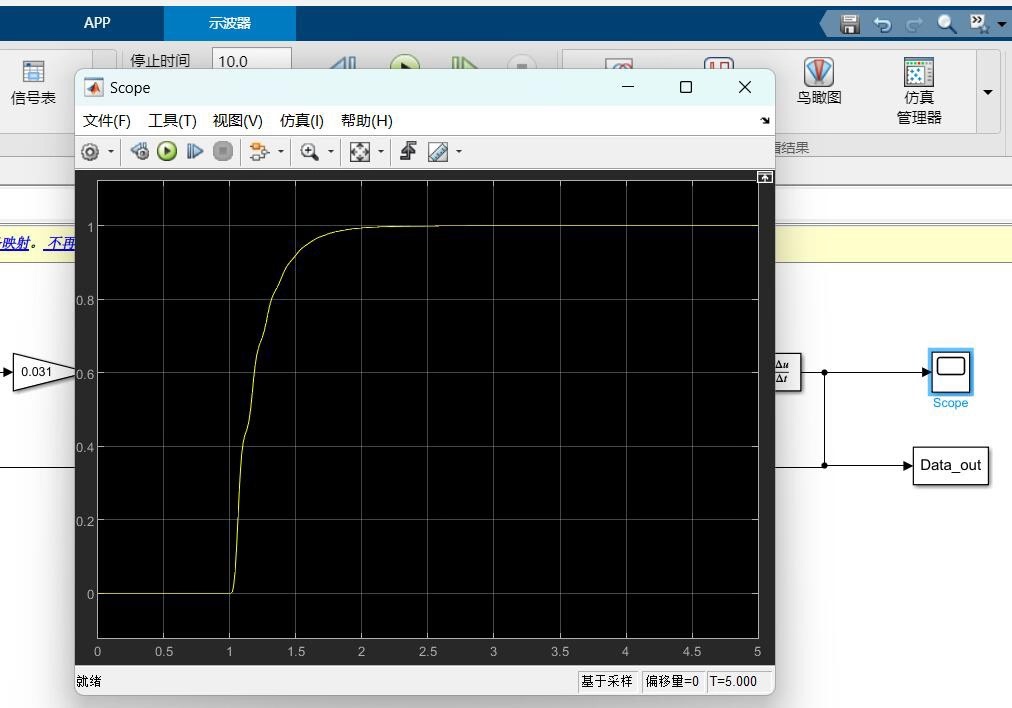
Simulink搭建部分
PID和被控对象部分都是在Simulink中搭建的。在Simulink中,我们可以方便地构建PID控制器模块和被控对象模型。比如被控对象可以是一个简单的传递函数模型,PID控制器则通过设置Kp、Ki、Kd参数来实现控制。然后将两者连接起来,运行仿真,就能直观地看到系统的响应。这里就不详细展示Simulink的搭建截图啦😉,大家可以自己动手试试~
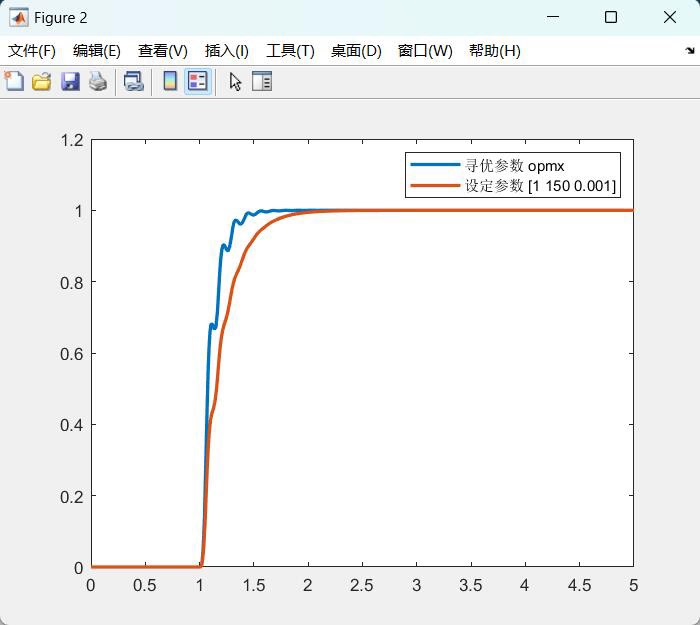
通过GA-PID这种方式,能让控制系统更快地达到更好的性能,在很多实际工程应用中都非常有价值呢🧐。希望这篇分享能让大家对GA-PID有更清晰的了解!
你在使用GA-PID或者相关算法的时候有没有遇到什么有趣的事情呀🧐,欢迎在评论区留言讨论😃。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)