基于粒子群(PSO)优化的BP神经网络PID控制:探索智能控制新高度
基于粒子群(pso)优化的bp神经网络PID控制…
在控制领域,我们一直在追求更精准、更智能的控制策略。基于粒子群(PSO)优化的BP神经网络PID控制,就是这样一种融合多种技术优势的创新方案,它正逐渐改变着传统控制的格局。
一、PID控制基础
PID控制器作为经典控制算法,广泛应用于各类控制系统中。它通过比例(P)、积分(I)、微分(D)三个环节对误差进行运算,输出控制量。其公式如下:
# 简单模拟PID控制
def pid_control(setpoint, process_variable, kp, ki, kd, dt):
error = setpoint - process_variable
p_term = kp * error
i_term = i_term + ki * error * dt
d_term = kd * (error - last_error) / dt if last_error is not None else 0
output = p_term + i_term + d_term
last_error = error
return output上述代码简单实现了PID控制逻辑。kp、ki、kd分别是比例、积分、微分系数,dt是时间间隔。比例环节根据当前误差调整输出,积分环节消除稳态误差,微分环节预测误差变化趋势。
然而,传统PID控制在面对复杂、非线性系统时,其固定参数的局限性就暴露出来了。这时候,BP神经网络和粒子群优化算法的引入就显得尤为重要。
二、BP神经网络的助力
BP神经网络是一种多层前馈神经网络,通过误差反向传播算法进行训练。它能够逼近任意非线性函数,非常适合处理复杂系统的建模与控制问题。
import numpy as np
# 定义BP神经网络结构
class NeuralNetwork:
def __init__(self, input_size, hidden_size, output_size):
self.input_size = input_size
self.hidden_size = hidden_size
self.output_size = output_size
self.W1 = np.random.rand(self.input_size, self.hidden_size)
self.b1 = np.zeros((1, self.hidden_size))
self.W2 = np.random.rand(self.hidden_size, self.output_size)
self.b2 = np.zeros((1, self.output_size))
def sigmoid(self, x):
return 1 / (1 + np.exp(-x))
def forward_propagation(self, X):
self.z1 = np.dot(X, self.W1) + self.b1
self.a1 = self.sigmoid(self.z1)
self.z2 = np.dot(self.a1, self.W2) + self.b2
self.a2 = self.sigmoid(self.z2)
return self.a2这段代码构建了一个简单的BP神经网络。输入层接收数据,通过权重W1和偏置b1传递到隐藏层,经过激活函数sigmoid处理后,再通过W2和b2传递到输出层。但BP神经网络存在容易陷入局部最优的问题。
三、粒子群优化算法(PSO)来救场
粒子群优化算法模拟鸟群觅食行为,每个粒子代表一个潜在解,在解空间中飞行寻找最优解。
import random
# 粒子群优化算法简单实现
def pso(num_particles, num_iterations, dim, lb, ub):
particles = []
for _ in range(num_particles):
particle = [random.uniform(lb, ub) for _ in range(dim)]
particles.append(particle)
gbest = min(particles, key=lambda p: fitness(p))
for _ in range(num_iterations):
for i in range(num_particles):
r1 = random.random()
r2 = random.random()
for j in range(dim):
particles[i][j] = particles[i][j] + 0.5 * r1 * (gbest[j] - particles[i][j]) + 0.5 * r2 * (pbest[i][j] - particles[i][j])
particles[i][j] = max(min(particles[i][j], ub), lb)
if fitness(particles[i]) < fitness(pbest[i]):
pbest[i] = particles[i][:]
if fitness(particles[i]) < fitness(gbest):
gbest = particles[i][:]
return gbest在这段代码中,numparticles是粒子数量,numiterations是迭代次数,dim是解的维度,lb和ub分别是解空间的下限和上限。每个粒子根据自身历史最优位置pbest和全局最优位置gbest调整飞行方向。
四、PSO优化BP神经网络PID控制整合
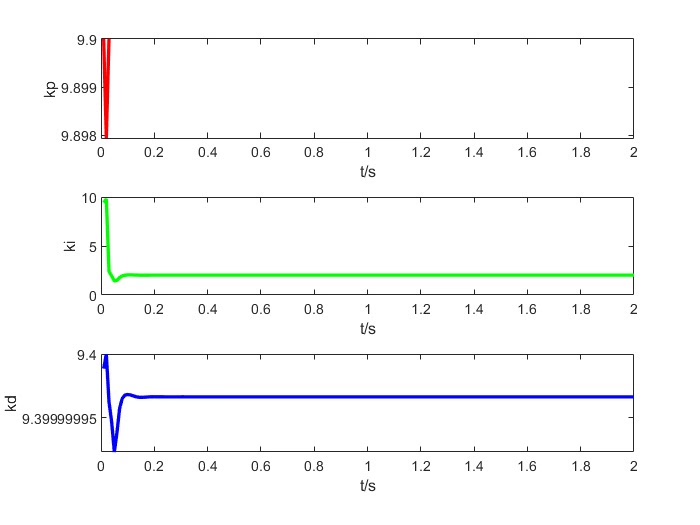
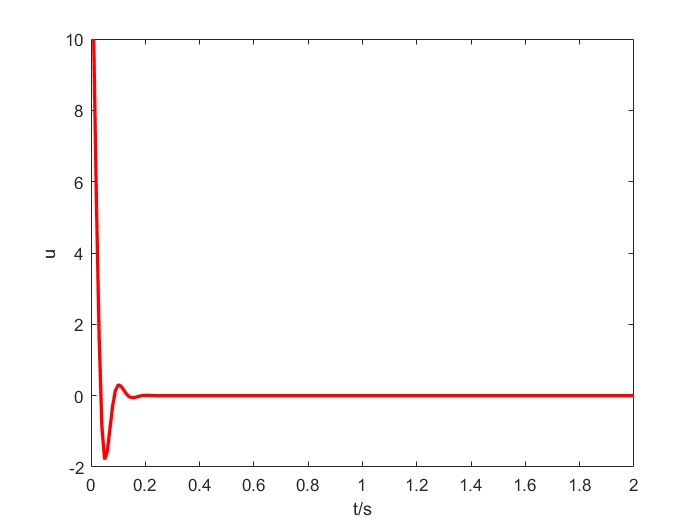
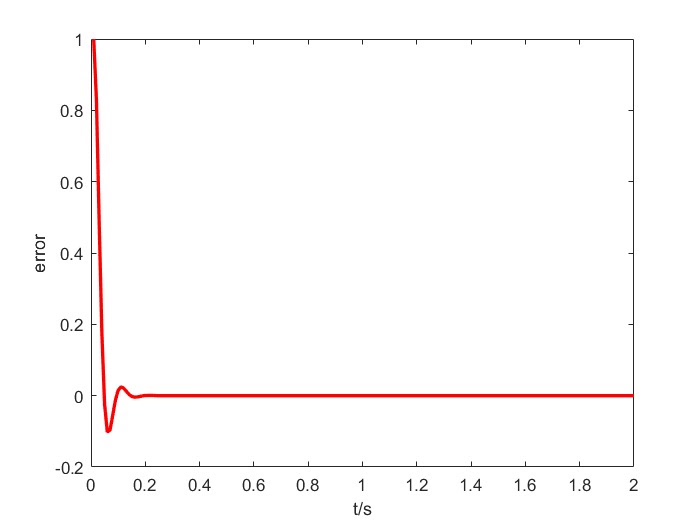
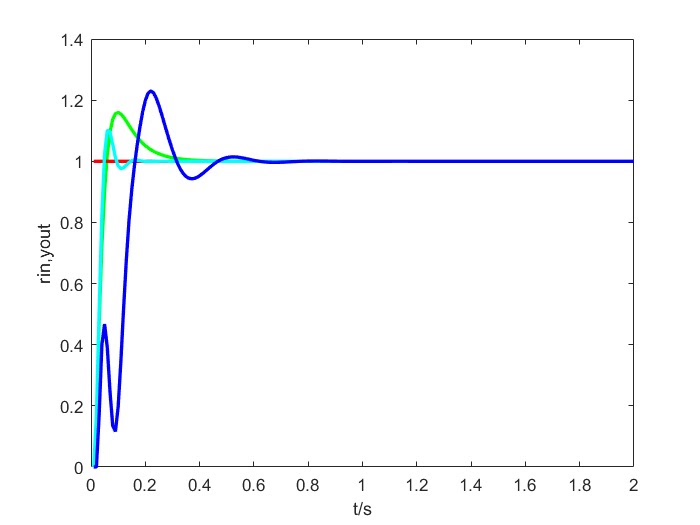
将PSO用于优化BP神经网络PID控制的参数。通过PSO搜索最优的BP神经网络权重和PID控制参数,使得控制系统在面对复杂情况时也能有出色表现。这样结合后,系统能够自适应调整参数,应对非线性、时变的被控对象,大大提高了控制精度和鲁棒性。
在实际应用中,无论是工业生产过程控制,还是智能机器人运动控制,基于粒子群(PSO)优化的BP神经网络PID控制都展现出了巨大的潜力,为我们带来更高效、更智能的控制体验。让我们持续探索,挖掘这一技术在更多领域的应用价值。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)