告别总线拥堵:利用电鱼智能 RK3568 双 CAN 接口重构农机数据通信架构
什么是 电鱼智能 RK3568?
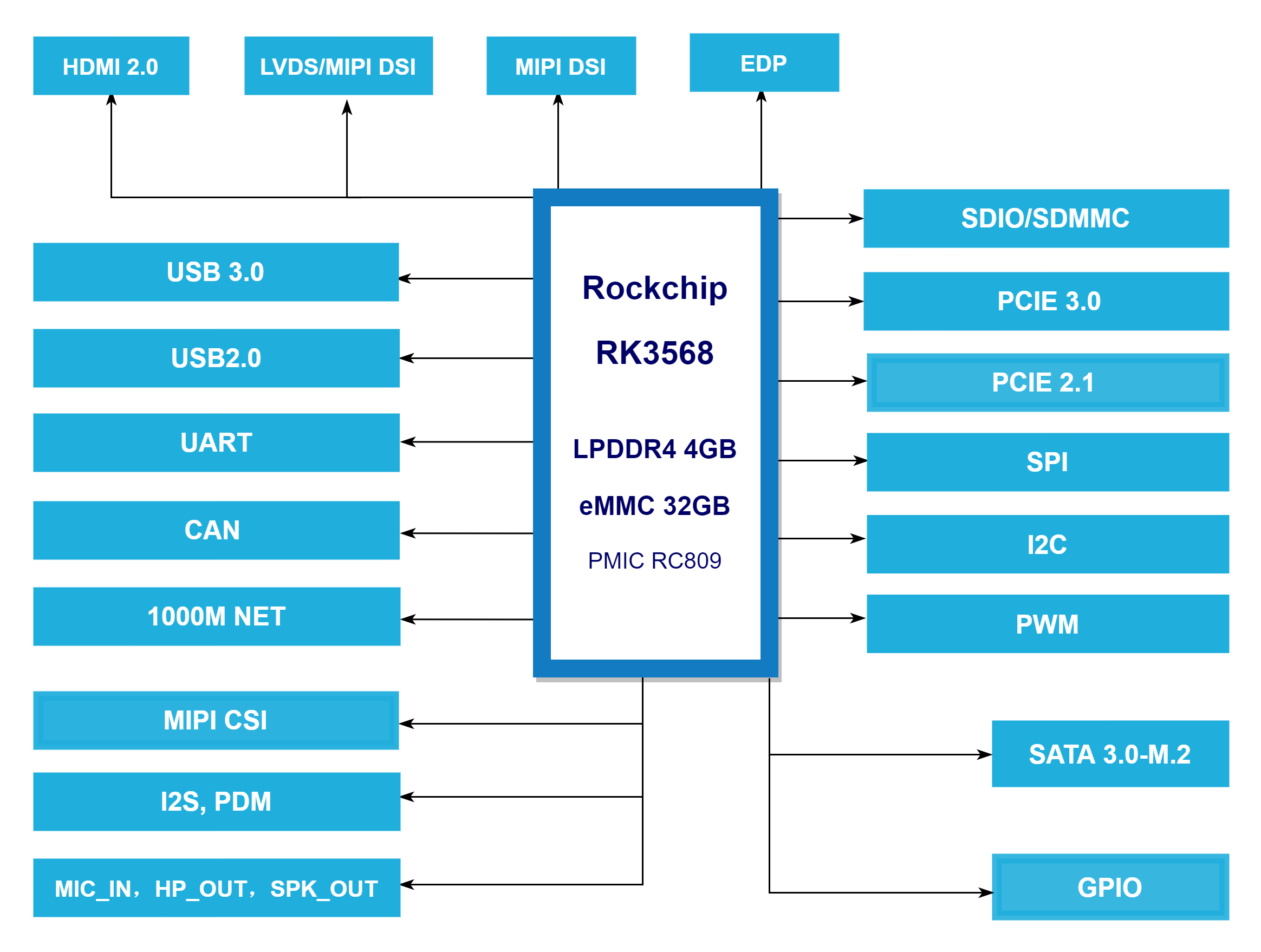
电鱼智能 RK3568 是一款面向工业互联与边缘计算的高性能核心平台。它搭载四核 Cortex-A55 处理器,主频 2.0GHz,且并未像消费级芯片那样阉割工业接口。相反,它原生集成了 3 路 CAN FD 控制器(支持 CAN 2.0B 兼容),配合双千兆网口,使其成为理想的**智能农机网关(Smart Gateway)与车载终端(T-BOX)**核心。
为什么农机总线需要重构为双 CAN 架构? (选型分析)
1. 物理隔离:保障动力安全
拖拉机的底盘总线(J1939)传输着发动机转速、扭矩、刹车等生命攸关的数据。如果将其与后挂的播种机、植保机(ISO 11783/ISOBUS)挂在同一条总线上,一旦农具 ECU 发生故障发送广播风暴,可能导致底盘控制瘫痪。
- 电鱼智能方案:利用 RK3568 的 CAN0 连接底盘动力网,CAN1 连接机具作业网。两者在物理层完全断开,仅通过 RK3568 内部软件进行受控的数据交换,彻底消除安全隐患。
2. 协议转换与波特率匹配
老旧农机可能运行在 250kbps 的标准 CAN 上,而新型智能农具可能采用 500kbps 甚至 CAN FD。
- 桥接能力:电鱼智能 RK3568 的 CPU 算力足以支撑实时的协议转换。它可以作为“翻译官”,将 CAN0 上的 J1939 发动机转速数据解析后,重新打包发送给 CAN1 上的农具控制器,无需统一全车波特率。
3. 边缘计算与数据过滤
并非所有数据都需要上传云端或显示在屏幕上。
- 流量清洗:RK3568 可以设置硬件过滤器,仅提取关键的作业数据(如亩施肥量、油耗)上传,屏蔽底层的握手心跳包,大幅降低 4G/5G 流量成本和云端存储压力。
系统架构与数据流 (System Architecture)
该方案采用了典型的**“双总线网关”**拓扑结构:
- 动力域 (CAN0 - 250kbps):连接发动机 ECU、变速箱 TCU、GPS 接收机。主要运行 SAE J1939 协议。
- 作业域 (CAN1 - 500kbps):连接施肥控制器、播种监测器、无人机通讯模块。主要运行 ISO 11783 或私有协议。
- 中央网关 (电鱼智能 RK3568):
- 路由逻辑:将 CAN0 的车速信息转发给 CAN1(供农具调整喷洒量)。
- 数据融合:将 CAN0 的位置信息与 CAN1 的作业数据打包,存入本地数据库。
- 人机交互:驱动驾驶舱屏幕显示全车状态。
推荐软件栈:
- OS: Linux (Buildroot) 或 Ubuntu Core。
- 驱动: SocketCAN (Linux 原生 CAN 驱动框架)。
- 应用: Python-CAN / C++ Can-utils + J1939 协议栈。
关键技术实现 (Implementation)
环境部署与接口配置
在电鱼智能 RK3568 上配置两个不同波特率的 CAN 接口:
Bash
# 配置 CAN0 (动力网,J1939 标准速率)
ip link set can0 down
ip link set can0 type can bitrate 250000 dbitrate 2000000 fd on
ip link set can0 up
# 配置 CAN1 (作业网,高速率)
ip link set can1 down
ip link set can1 type can bitrate 500000 dbitrate 2000000 fd on
ip link set can1 up
# 检查接口状态
ip -details link show can0智能网关数据转发逻辑 (Python)
以下代码展示了如何监听 CAN0 的车速数据,并将其转发至 CAN1,同时过滤掉其他无关报文:
Python
# 逻辑示例:跨 CAN 接口数据路由与过滤
import can
# 初始化两个总线
bus_chassis = can.interface.Bus(channel='can0', bustype='socketcan')
bus_implement = can.interface.Bus(channel='can1', bustype='socketcan')
# J1939 车速 PGN: 65265 (CCVS), ID通常包含 0xFEF1
SPEED_PGN_MASK = 0x00FF0000 # 简化的掩码示例
def gateway_loop():
print("网关服务已启动...")
for msg in bus_chassis:
# 1. 过滤:只处理车速相关报文
# J1939 扩展帧 ID 过滤逻辑
if (msg.arbitration_id & SPEED_PGN_MASK) >> 16 == 0xFE:
# 2. 解析 (可选):如果需要记录数据
# speed = parse_j1939_speed(msg.data)
# 3. 转发:将数据透传给农具总线 (CAN1)
# 修改源地址以标记数据来自网关
new_id = (msg.arbitration_id & 0xFFFFFF00) | 0x20 # 假设网关源地址 0x20
forward_msg = can.Message(
arbitration_id=new_id,
data=msg.data,
is_extended_id=True
)
try:
bus_implement.send(forward_msg)
except can.CanError:
print("作业总线发送失败")
if __name__ == "__main__":
gateway_loop()性能表现 (理论预估)
- 转发延迟:在 Linux 用户态下使用 Python 转发,延迟约 1-3ms;若使用 C 语言或内核态路由(使用 can-gw 模块),延迟可低至 < 200μs。
- 总线负载优化:通过隔离,动力网负载率可从 80% 降低至 40%,有效避免了高优先级的刹车/油门信号被阻塞。
- 可靠性:电鱼智能 RK3568 支持工业级宽温,在 -30°C 至 +75°C 环境下,CAN 接口误码率低于 10^{-9。
常见问题 (FAQ)
1. RK3568 的 CAN 是原生的还是 USB 转的?
答:原生的。电鱼智能 RK3568 SoC 内部集成了 3 个 CAN-FD 控制器,通过底板上的收发器(Transceiver)直接引出。相比 USB 转 CAN,原生接口在实时性和稳定性上有本质区别,不会出现掉线问题。
2. 需要加终端电阻吗?
答:必须加。在底板设计或接线时,请确保 CAN 总线的两端各并联一个 120Ω 终端电阻。电鱼智能的标准开发底板通常已预留了跳线帽来开启/关闭板载电阻。
3. 如何实现 ISO 11783 (ISOBUS) 协议栈?
答:RK3568 提供了物理层和链路层支持。完整的 ISOBUS 协议栈(包含 VT 虚拟终端功能)通常需要购买第三方商业授权库(如 OSB 库)或基于开源项目(如 ISOAgLib)进行移植开发。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 22
22 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)