基于人工神经网络的系统辨识及MATLAB源码分享
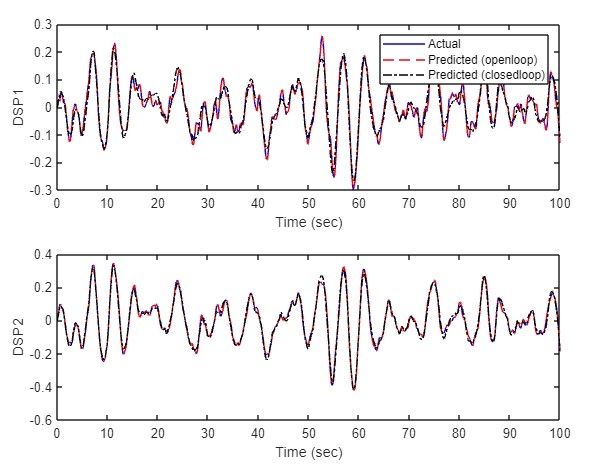
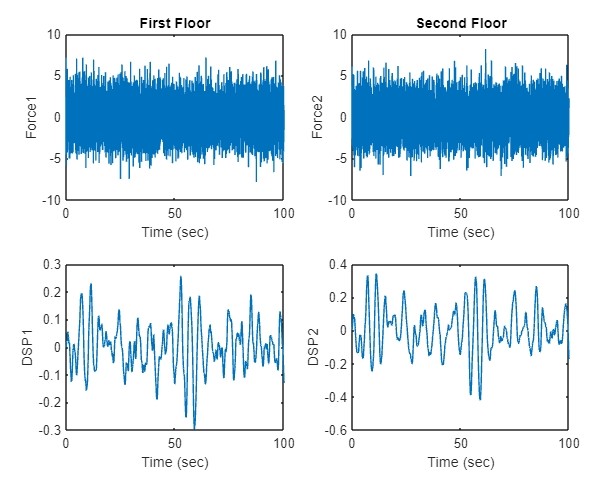
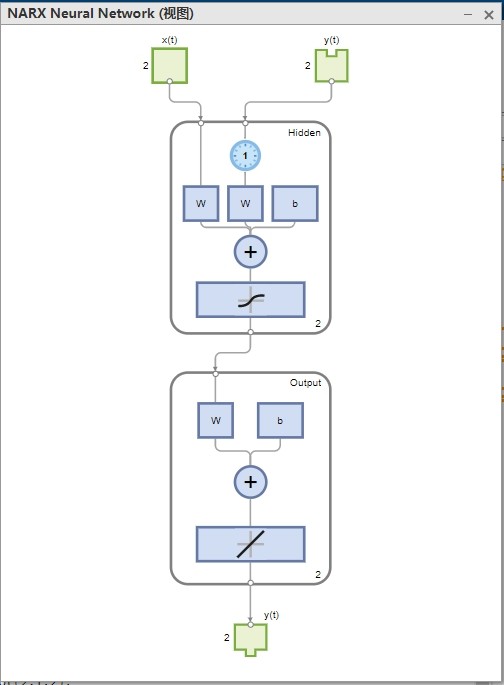
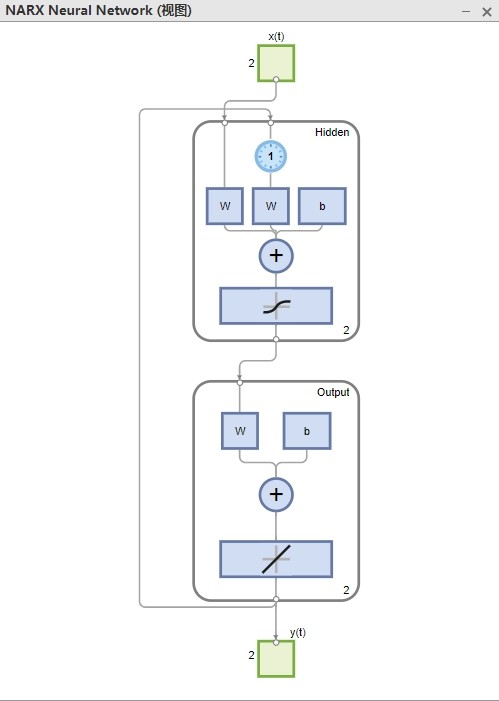
基于人工神经网络的系统辩识(MATLAB源码分享) 该示例文件显示了使用高斯白噪声下2DOF系统的人工神经网络(ANN)进行系统辩识。 神经网络由输入层,输出层,隐藏层组成: -输入层:2个节点使用当前步骤的力,2个节点使用开环反馈前一步骤的位移 -隐藏层:2个节点用于两个内部状态,因为2DOF系统具有2种模式 -输出层:用于位移的2个节点 在训练并获得预测输出后,将网络转换为闭环网络并再次训练(闭环网络使用前一步的预测反馈而不是实际反馈)。 将开环和闭环网络的预测输出与图中的实际输出进行了比较。 结果表明,由于前一步的实际输出可用,开环网络比闭环网络更准确。
在工程领域,系统辨识是一项极为重要的任务,今天咱们来聊聊基于人工神经网络(ANN)的系统辨识,还会分享MATLAB源码哦。这次的示例是基于高斯白噪声下的2DOF系统,通过ANN实现系统辨识。
神经网络结构剖析
神经网络主要由输入层、输出层和隐藏层构成。
输入层
咱们这个例子里,输入层有4个节点。其中2个节点用于获取当前步骤的力,另外2个节点则负责采集开环反馈前一步骤的位移。这就像是给神经网络装上了“传感器”,让它能感知系统当前的力的情况以及前一步位移状态。在MATLAB里,我们可以这样来简单定义输入数据:
% 假设已经获取到力和位移数据
force_current = [force1_current, force2_current]; % 当前步骤的力
displacement_previous = [disp1_previous, disp2_previous]; % 前一步骤的位移
input_data = [force_current, displacement_previous]; % 组合成输入数据这里我们只是简单示意如何构建输入数据,实际应用中数据的获取和处理可能更复杂。
隐藏层
隐藏层有2个节点,这是因为2DOF系统具有2种模式,每个节点就像是一个小的“信息加工厂”,对输入的数据进行初步加工处理。
输出层
输出层有2个节点,专门用于输出位移数据。
训练过程
首先,对神经网络进行训练得到预测输出。之后呢,将这个网络转换为闭环网络并再次训练。这里的闭环网络和开环网络的区别就在于,闭环网络使用前一步的预测反馈而不是实际反馈。
在MATLAB中,训练神经网络可以利用Neural Network Toolbox。比如这样简单的训练代码框架:
% 创建一个简单的神经网络
net = feedforwardnet([2]); % 2个隐藏层节点
% 设置训练参数
net.trainParam.epochs = 100;
net.trainParam.goal = 0.01;
% 准备训练数据,这里假设input_data和target_displacement已经准备好
[net,tr] = train(net,input_data,target_displacement);
% 进行预测
predicted_displacement = net(input_data);这段代码创建了一个前馈神经网络,设置了训练的轮数和目标误差,然后用准备好的数据进行训练并预测。
结果对比与分析
最后,将开环和闭环网络的预测输出与实际输出放在图中进行比较。结果发现,开环网络比闭环网络更准确。这是因为开环网络在前一步能获取到实际输出,就好比它“眼睛更亮”,能更准确地做出下一步预测。而闭环网络只能依赖前一步自己预测的反馈,就多了些“不确定性”,导致准确性稍逊一筹。

通过这样的系统辨识过程以及MATLAB代码实现,我们可以更深入地理解人工神经网络在系统辨识中的应用,也希望分享的这些能帮助大家在相关项目中少走些弯路。完整的项目代码需要根据实际的数据获取、数据预处理等进一步完善,这里只是提供一个核心思路和框架。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 24
24 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)