最近在研究永磁同步电机(PMSM)的控制策略,发现RBF神经网络调节PID的方法挺有意思的。今天就来聊聊这个话题,顺便看看代码实现
RBF调节PID,永磁同步电机PMSM,神经网络PID,径向基函数,自整定PID 有双闭环和单闭环两个文件,简单的说明文档
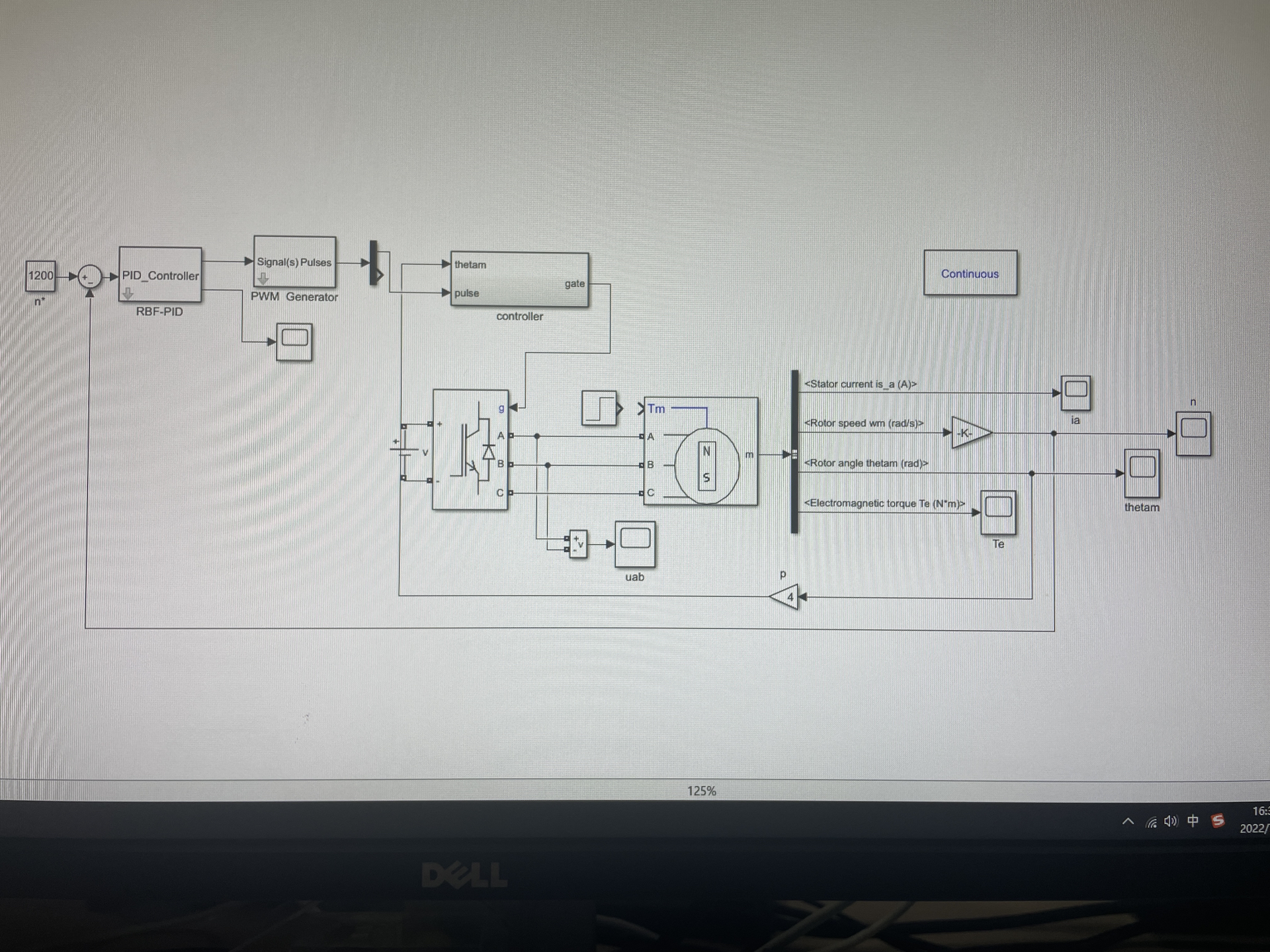
先说下背景,PMSM的控制通常采用双闭环结构,外环是速度环,内环是电流环。传统的PID控制虽然简单,但面对非线性、时变的电机系统,往往力不从心。这时候,RBF神经网络就派上用场了。
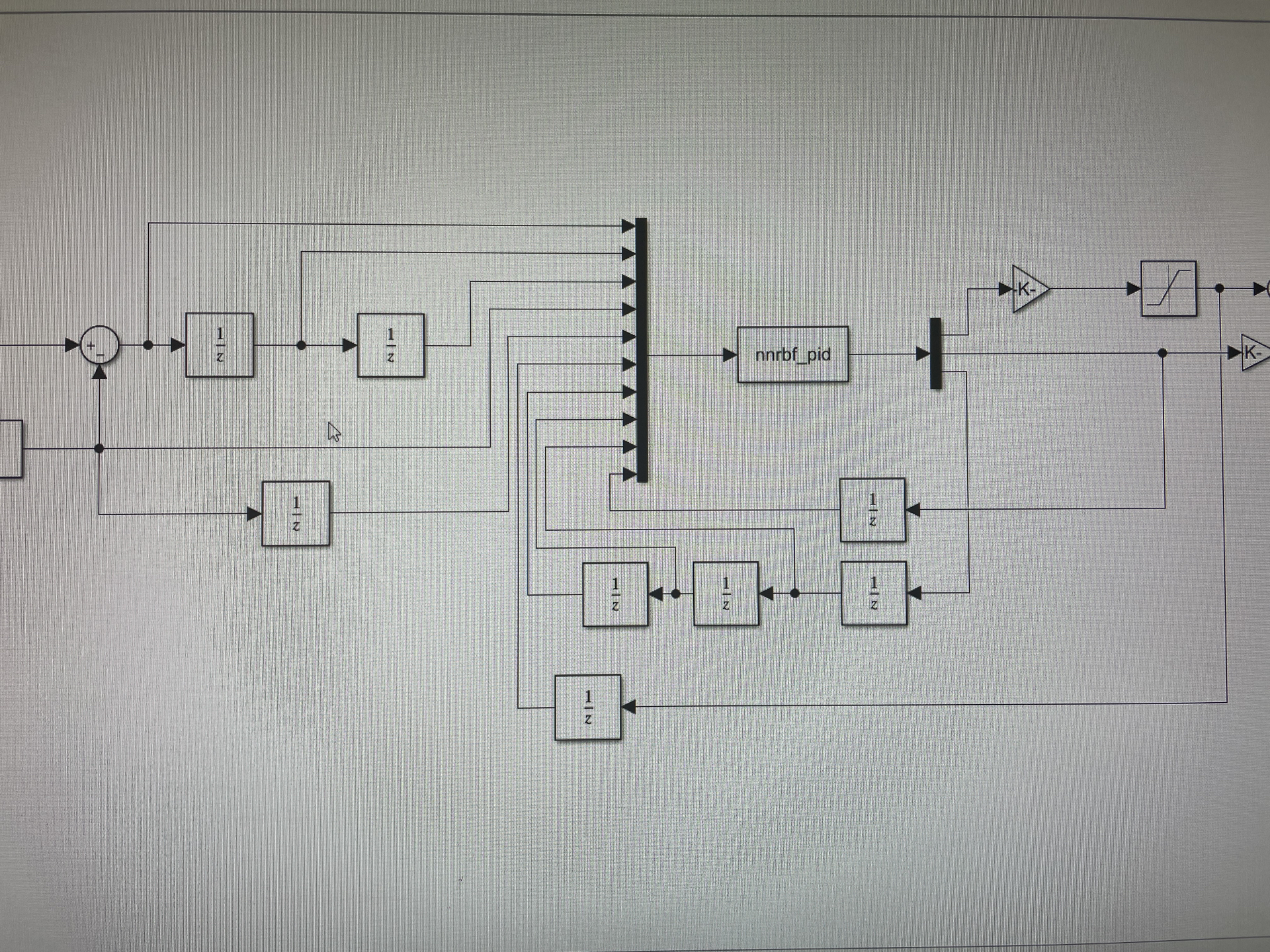
RBF,全称径向基函数,是一种前馈神经网络。它的特点是只有一个隐藏层,激活函数是径向基函数。我们可以用RBF来在线调整PID参数,实现自整定。
来看段代码,这是RBF神经网络的核心部分:
class RBFNN:
def __init__(self, input_dim, hidden_dim, output_dim):
self.input_dim = input_dim
self.hidden_dim = hidden_dim
self.output_dim = output_dim
self.centers = np.random.uniform(-1, 1, (hidden_dim, input_dim))
self.widths = np.ones(hidden_dim)
self.weights = np.random.uniform(-1, 1, (hidden_dim, output_dim))
def gaussian(self, x, c, w):
return np.exp(-np.linalg.norm(x - c) ** 2 / (2 * w ** 2))
def forward(self, x):
h = np.array([self.gaussian(x, c, w) for c, w in zip(self.centers, self.widths)])
y = np.dot(h, self.weights)
return y这段代码定义了一个RBF神经网络类。gaussian函数是径向基函数,forward函数是前向传播。RBF的核心思想就是用这些高斯函数来逼近非线性函数。
接下来,我们看看怎么用RBF来调节PID参数。代码是这样的:
class RBF_PID:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.rbfnn = RBFNN(input_dim=3, hidden_dim=5, output_dim=3)
self.last_error = 0
self.integral = 0
def update(self, error):
delta_error = error - self.last_error
self.integral += error
self.last_error = error
inputs = np.array([error, delta_error, self.integral])
delta_params = self.rbfnn.forward(inputs)
self.kp += delta_params[0]
self.ki += delta_params[1]
self.kd += delta_params[2]
def control(self, error):
self.update(error)
return self.kp * error + self.ki * self.integral + self.kd * (error - self.last_error)这个RBF_PID类实现了用RBF神经网络在线调整PID参数。update方法根据当前误差和误差变化率,通过RBF网络计算出PID参数的调整量。control方法就是标准的PID控制。
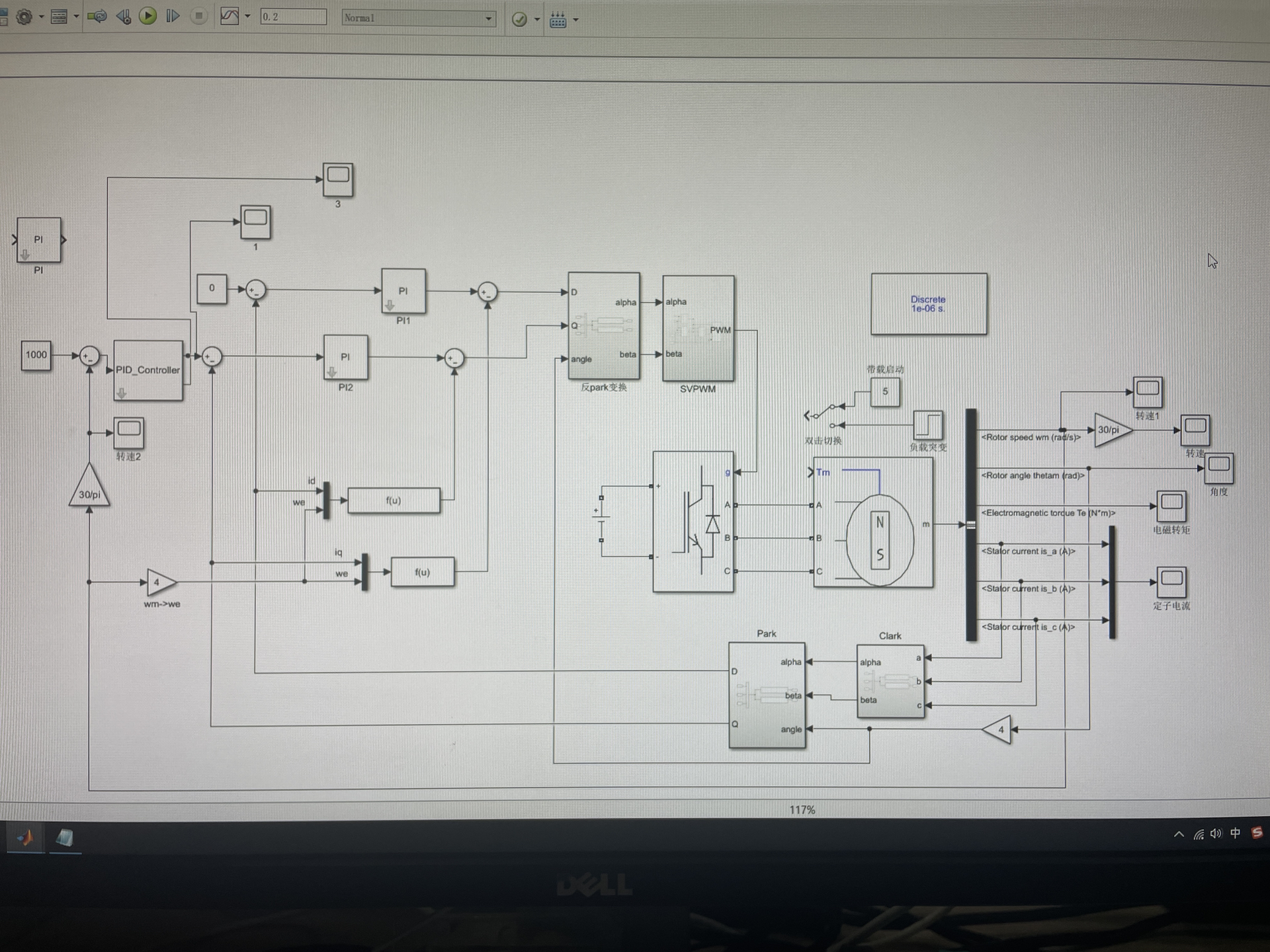
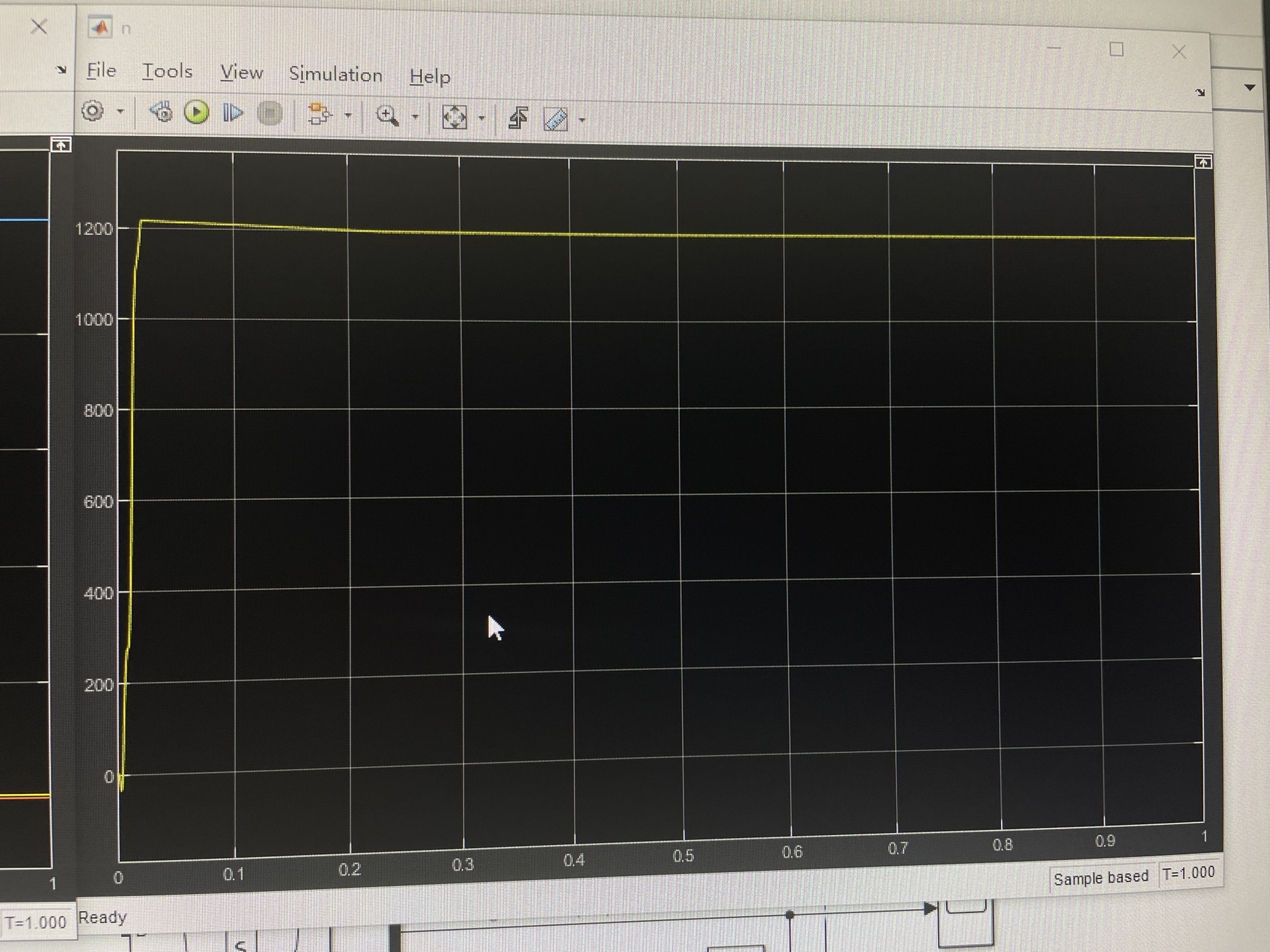
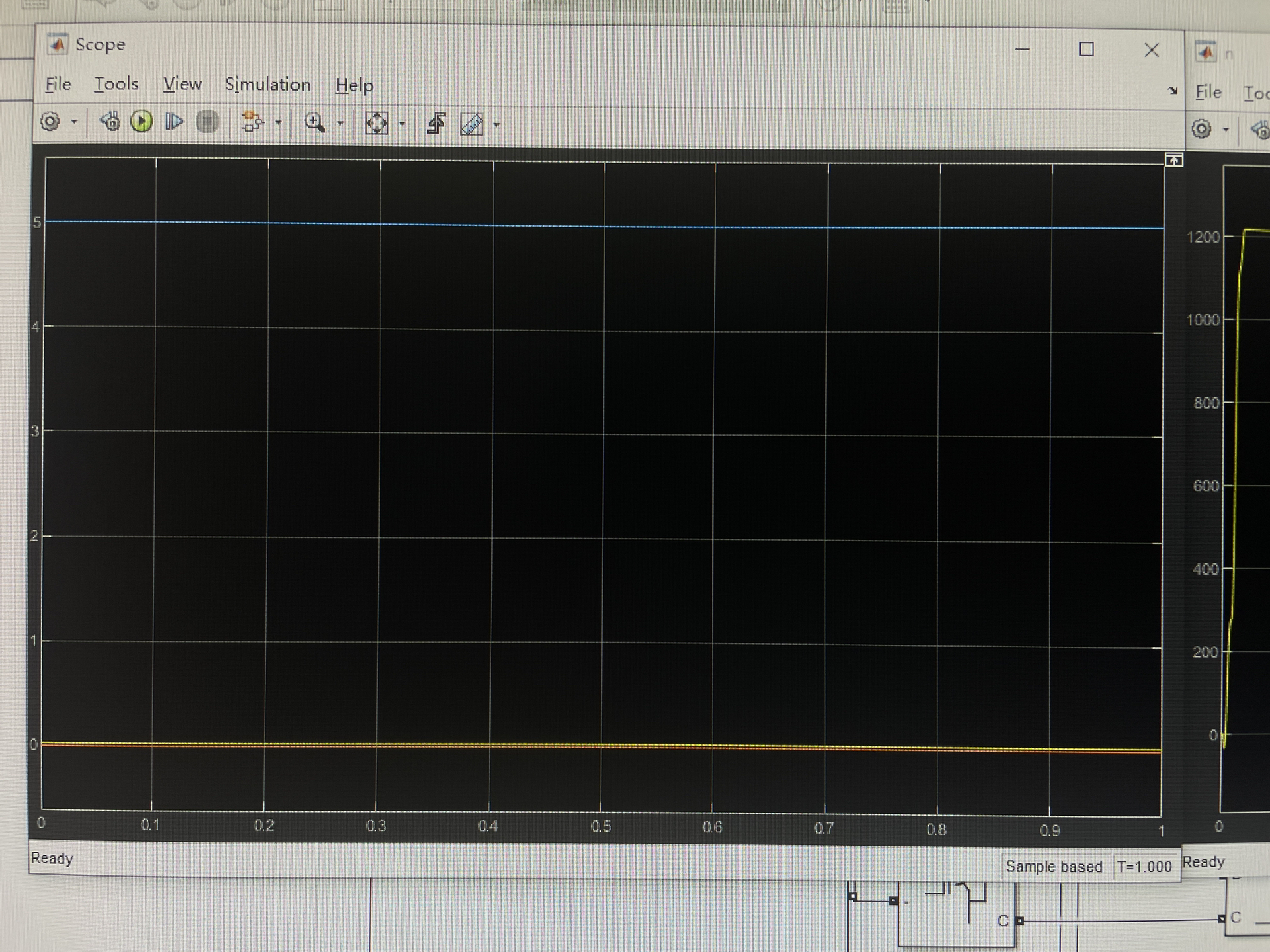
在实际应用中,我们可以把这个RBFPID控制器放在PMSM的双闭环系统中。外环用RBFPID控制速度,内环用传统PID控制电流。这样既能保证系统的动态响应,又能提高鲁棒性。
最后说下单闭环和双闭环的区别。单闭环只有速度环,控制简单但精度不够。双闭环增加了电流环,控制更精确但复杂度也提高了。选择哪种结构,要看具体应用场景。
总之,RBF神经网络调节PID是个很有意思的方法。它结合了传统控制的简单性和神经网络的适应性,在PMSM控制中表现不错。当然,这只是一个初步的实现,还有很多可以优化的地方,比如RBF网络的结构、学习算法等。有兴趣的朋友可以继续深入研究。
好了,今天就聊到这里。下次有机会再分享其他有意思的控制方法。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)