CNN卷积神经网络、CNN概述、卷积层、池化层、深度卷积神经网络、服装分类案例
卷积神经网络(Convolutional Neural Network,CNN)常被用于图像识别、语音识别等各种场合。它在计算机视觉领域表现尤为出色,广泛应用于图像分类、目标检测、图像分割等任务。
一、CNN概述
卷积神经网络(Convolutional Neural Network,CNN)常被用于图像识别、语音识别等各种
场合。它在计算机视觉领域表现尤为出色,广泛应用于图像分类、目标检测、图像分割等任务。
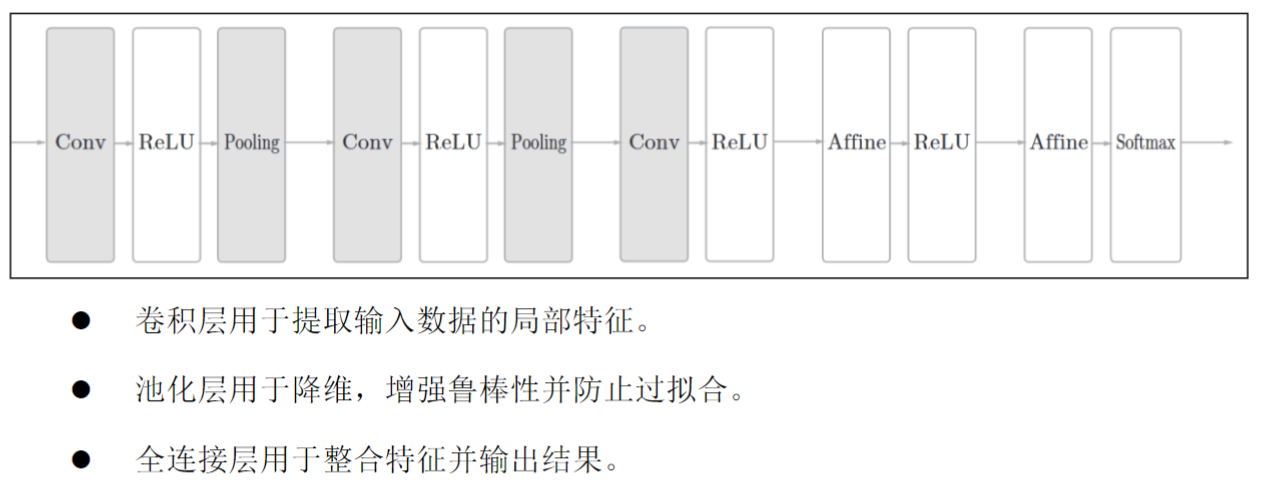
CNN中新出现了卷积层(Convolution层)和池化层(Pooling层),下图是一个CNN的结构:
二、卷积层(3,1,1)or(5,1,2)
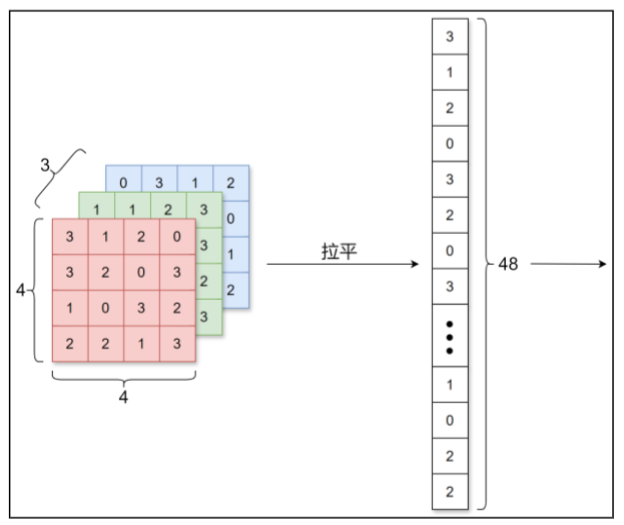
在全连接层中,相邻层的神经元全部连接在一起,输出的数量可以任意决定,但是却忽视了
数据的形状。比如,输入数据为图像时,图像通常是长、宽、通道方向上的3维数据,但是向全连
接层输入时却需要将其拉平为1维数据。而卷积层可以保持数据形状不变,即接收3维形状的输入数
据后同样以3维形状将数据输出至下一层。
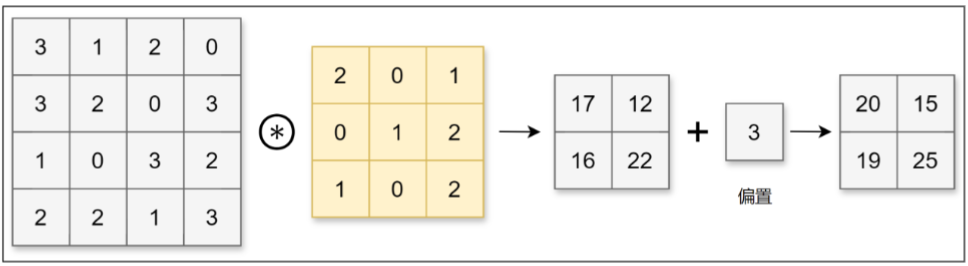
1、卷积运算
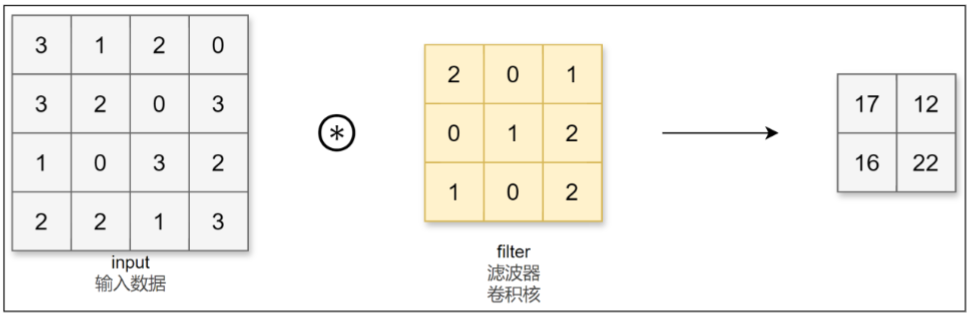
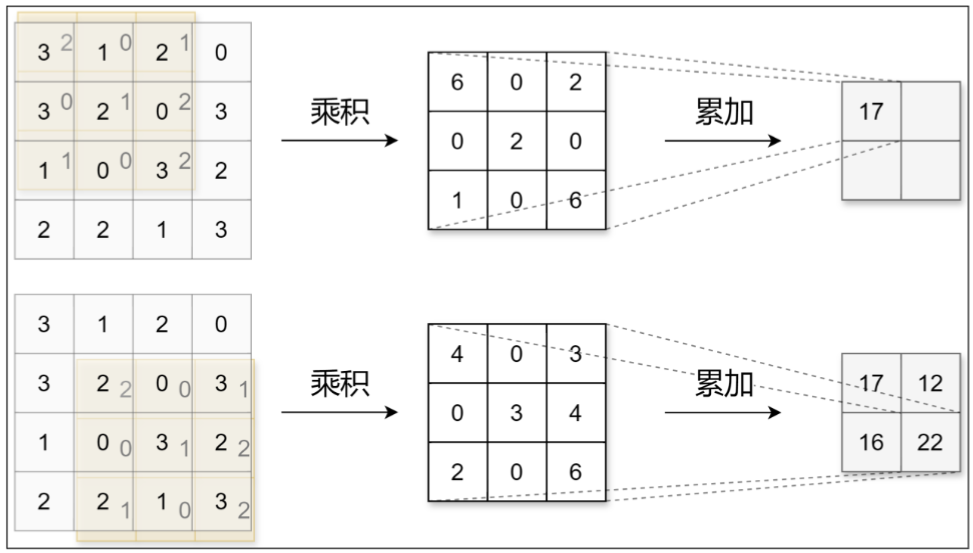
CNN中,卷积核的参数对应之前的权重。并且CNN中也存在偏置。
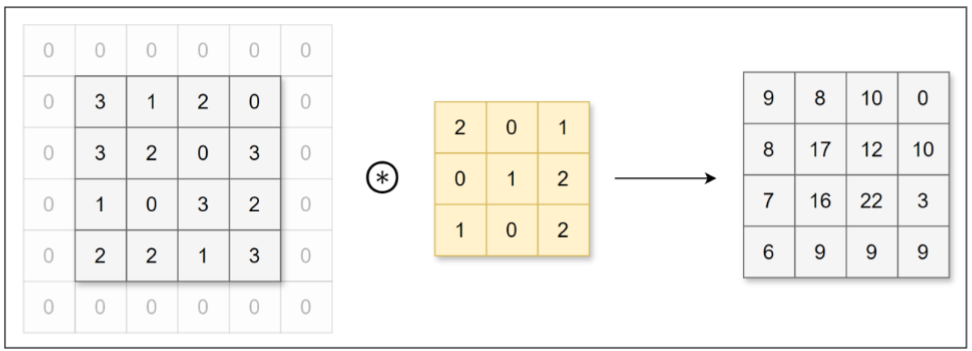
2、填充
在进行卷积层的处理之前,有时要向输入数据的周围填入固定的数据(比如0),这称为填充
(padding)。例如,对形状为4×4的数据进行幅度为1的填充,即用幅度为1、值为0的数据填充周
围:
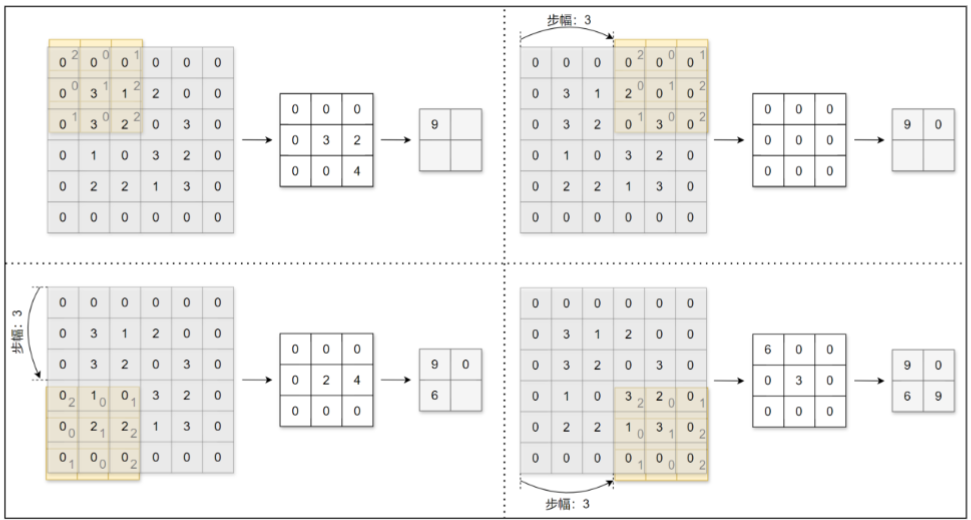
3、步幅
应用卷积核的位置间隔称之为步幅(stride)。之前的例子中步幅都为1,下面我们进行步幅
为3的卷积运算:
4、三维数据的卷积运算
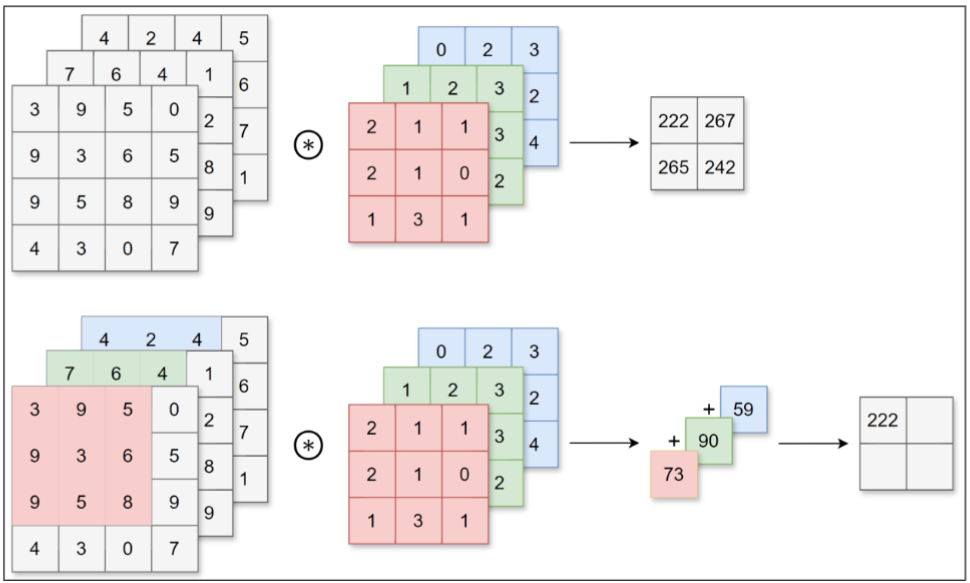
若想在通道方向获得多个卷积运算的输出,需要使用多个卷积核。
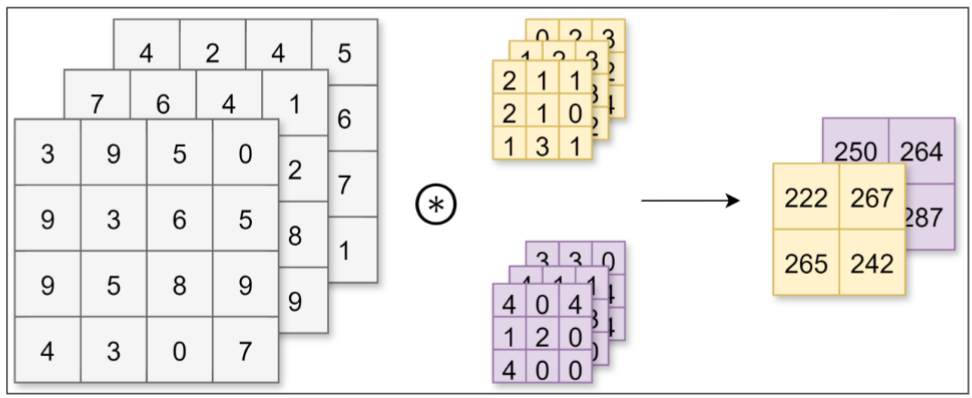
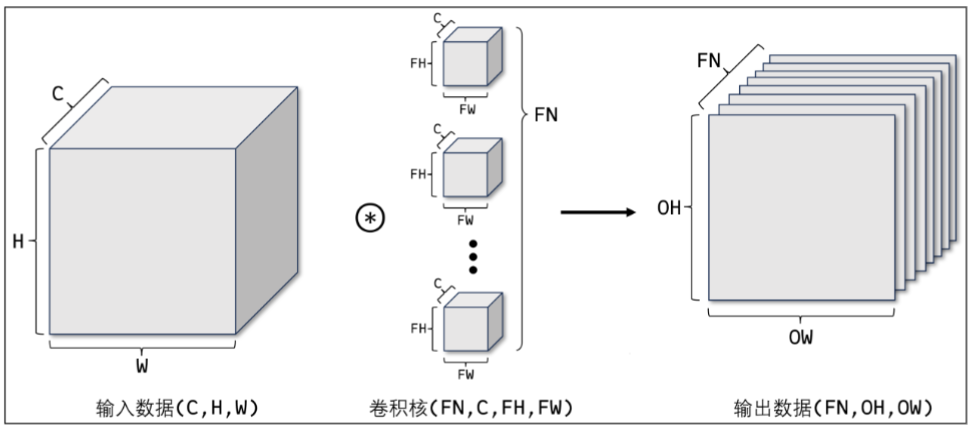
使用FN个卷积核,输出特征图也变为FN个:
5、API调用
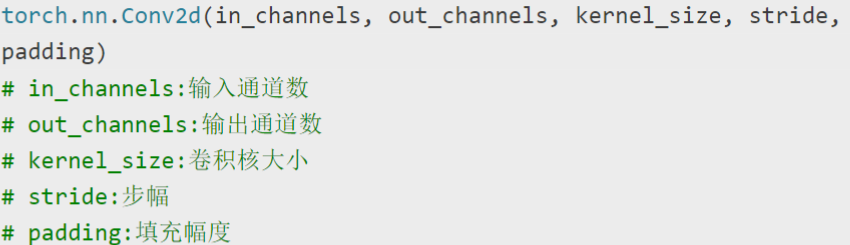
输出通道数就是FN个数,也就是卷积核个数
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
import torch
import matplotlib.pyplot as plt
img = plt.imread('data/duck.jpg')
print(img.shape)
input = torch.tensor(img).permute(2,0,1).float()
print(input.shape)
conv = torch.nn.Conv2d(in_channels=3, out_channels=3, kernel_size=9, stride=3, padding=0,bias=False)
output = conv(input)
print(output.shape)
output = torch.clamp(output.int(),0,255)
out_img = output.permute(1,2,0).detach().numpy()
print(out_img.shape)
fig,ax = plt.subplots(1,2,figsize=(10,5))
ax[0].imshow(img)
ax[1].imshow(out_img)
plt.show()
(1080, 1080, 3)
torch.Size([3, 1080, 1080])
torch.Size([3, 358, 358])
(358, 358, 3)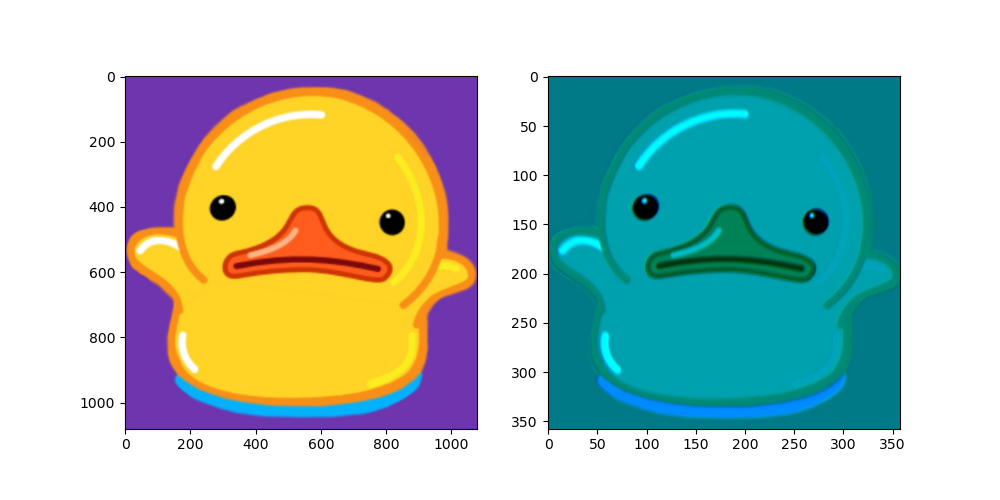
三、池化层(2,2,0)
池化层相当于定义一个操作,对原始的数据局部进行计算,没有权重偏置,目的是为了降维。例
如,对数据进行步幅为2的2×2的Max池化(计算窗口内的最大值):
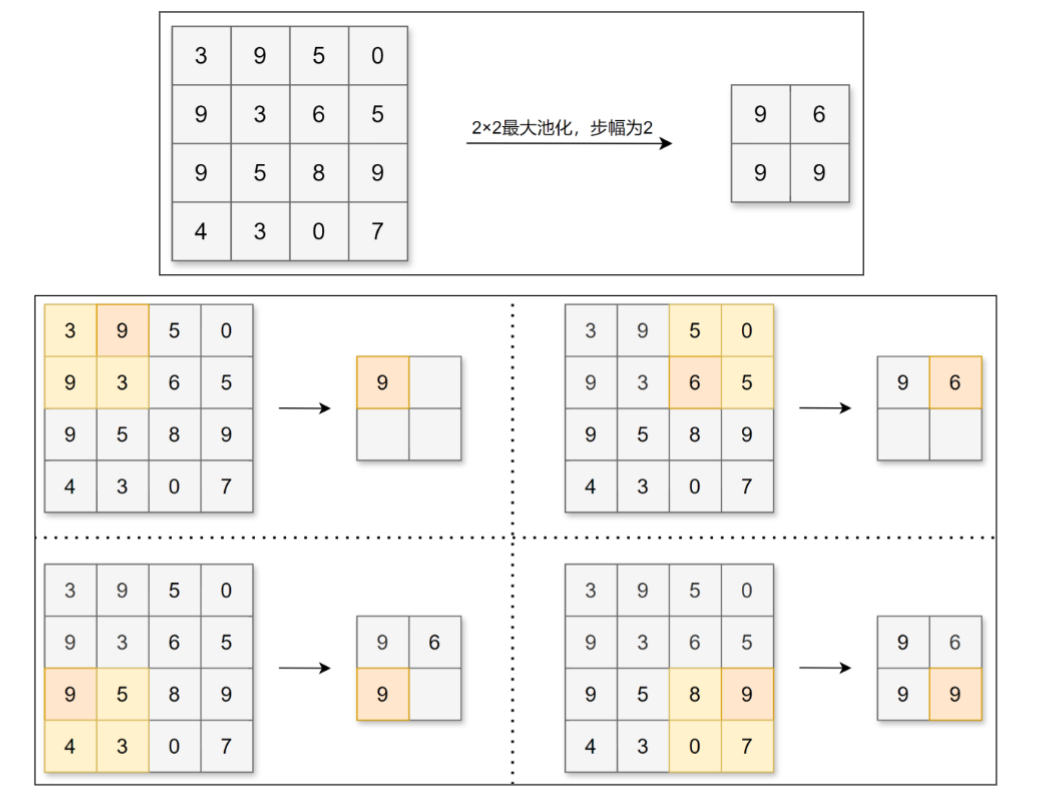
除了Max池化(计算窗口内的最大值),还有Average池化(计算窗口内的平均值)。一般会将池
化的大小窗口和步幅设置为相同的值,比如2×2的窗口大小,步幅会设置为2。和卷积层不同,池
化层没有要学习的参数,并且池化运算按通道独立进行,经过池化运算后数据的通道数不会发生变
化。池化的另一个特点是对微小偏差具有鲁棒性,数据发生微小偏差时,池化可能会返回相同的结
果。
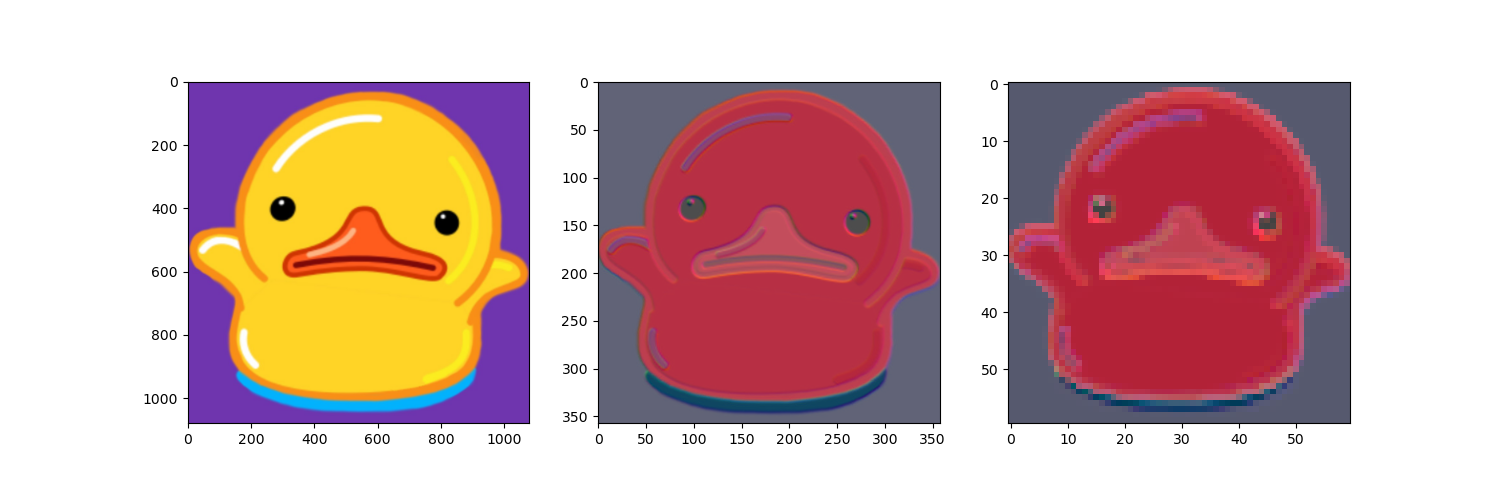
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
import torch
import matplotlib.pyplot as plt
img = plt.imread('data/duck.jpg')
print(img.shape)
input = torch.tensor(img).permute(2,0,1).float()
print(input.shape)
conv = torch.nn.Conv2d(in_channels=3, out_channels=3, kernel_size=9, stride=3, padding=0,bias=False)
output_conv = conv(input)
print(output_conv.shape)
pool = torch.nn.MaxPool2d(kernel_size = 6,stride = 6,padding = 1)
output_pool = pool(output_conv)
print(output_pool.shape)
out_conv = (output_conv - torch.min(output_conv)) / (torch.max(output_conv) - torch.min(output_conv))
output_conv_img = out_conv.permute(1,2,0).detach().numpy()
print(output_conv_img.shape)
out_pool = (output_pool - torch.min(output_pool)) / (torch.max(output_pool) - torch.min(output_pool))
output_pool_img = out_pool.permute(1,2,0).detach().numpy()
print(output_pool_img.shape)
fig,ax = plt.subplots(1,3,figsize=(15,5))
ax[0].imshow(img)
ax[1].imshow(output_conv_img)
ax[2].imshow(output_pool_img)
plt.show()
(1080, 1080, 3)
torch.Size([3, 1080, 1080])
torch.Size([3, 358, 358])
torch.Size([3, 60, 60])
(358, 358, 3)
(60, 60, 3)
四、深度卷积神经网络DCNN
神经网络的层数加深,可以更有效地提取层次信息,还可以减少参数数量,从而让学习更加高效。
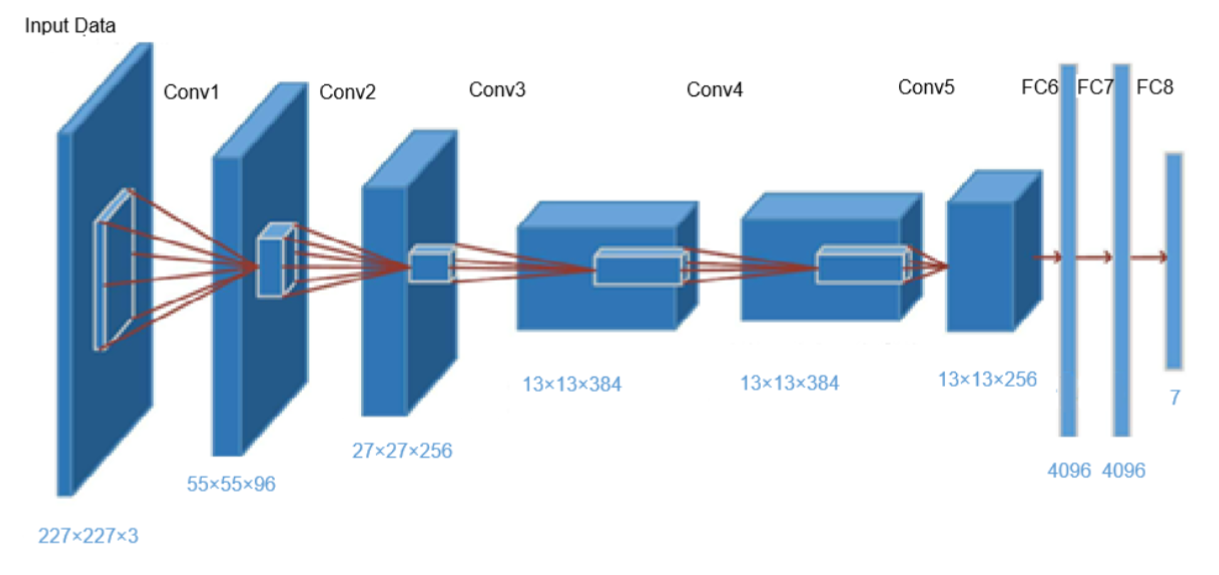
1、AlexNet
2012年由Alex Krizhevsky、Ilya Sutskever与Geoffrey Hinton合作提出,是一个基于CNN构建的神
经网络模型,主要架构包含8层(5个卷积层+3个全连接层),激活函数使用ReLU,最后经全连接
层输出结果,并且使用了Dropout。
import torchvision.models as models
# AlexNet
alexnet = models.alexnet()
print(alexnet)
AlexNet(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(11, 11), stride=(4, 4), padding=(2, 2))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(64, 192, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(4): ReLU(inplace=True)
(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(192, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU(inplace=True)
(8): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU(inplace=True)
(10): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(6, 6))
(classifier): Sequential(
(0): Dropout(p=0.5, inplace=False)
(1): Linear(in_features=9216, out_features=4096, bias=True)
(2): ReLU(inplace=True)
(3): Dropout(p=0.5, inplace=False)
(4): Linear(in_features=4096, out_features=4096, bias=True)
(5): ReLU(inplace=True)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
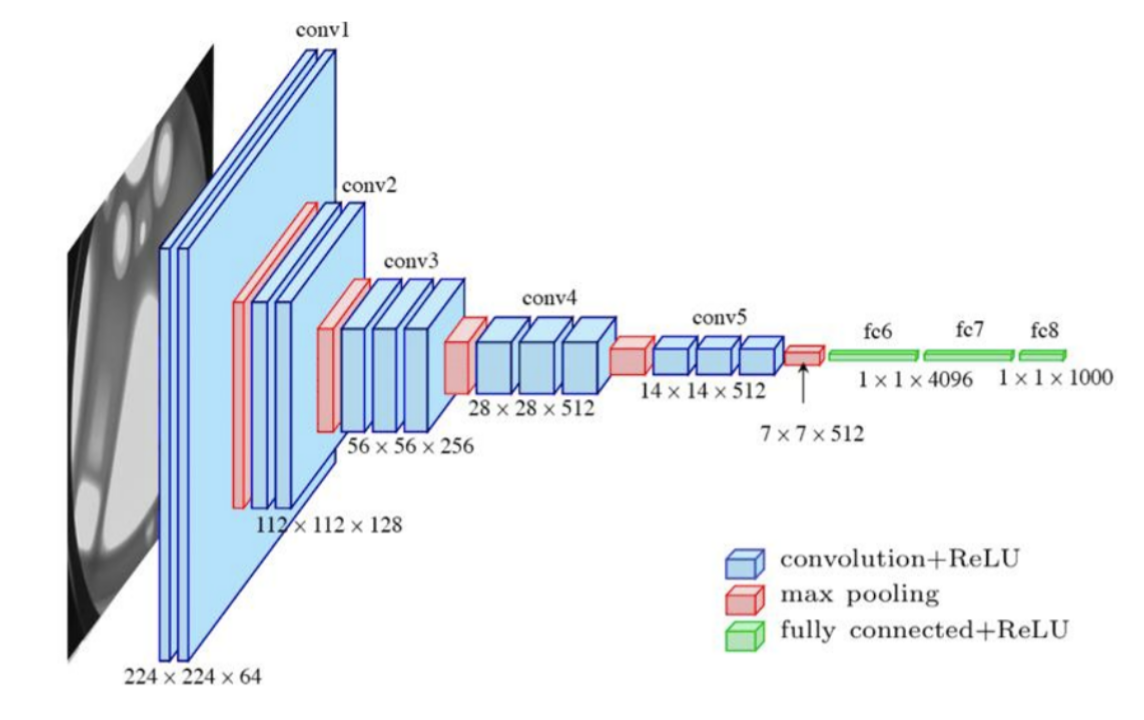
)2、VGG
2014年由牛津大学Visual Geometry Group(视觉几何组)提出。VGG网络由多个卷积-池化层堆
叠构成,将有权重的层(卷积层或全连接层)叠加至16或19层,也被称为VGG-16和VGG-19。
import torchvision.models as models
# VGG
vgg16 = models.vgg16()
print(vgg16)
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
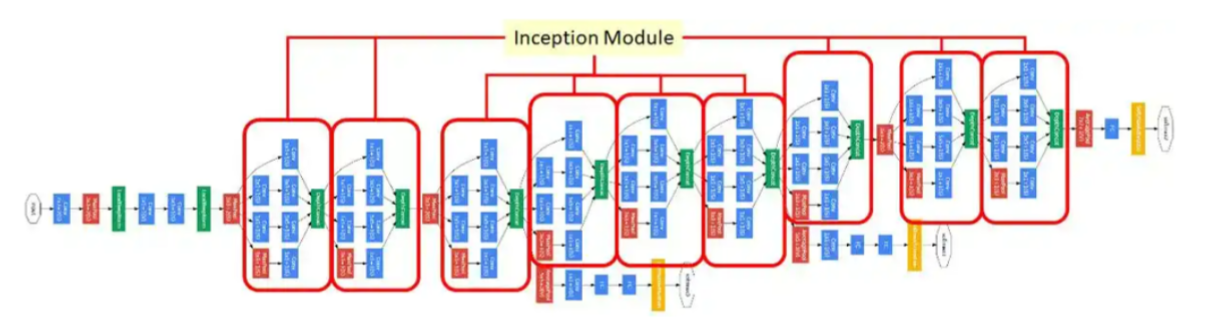
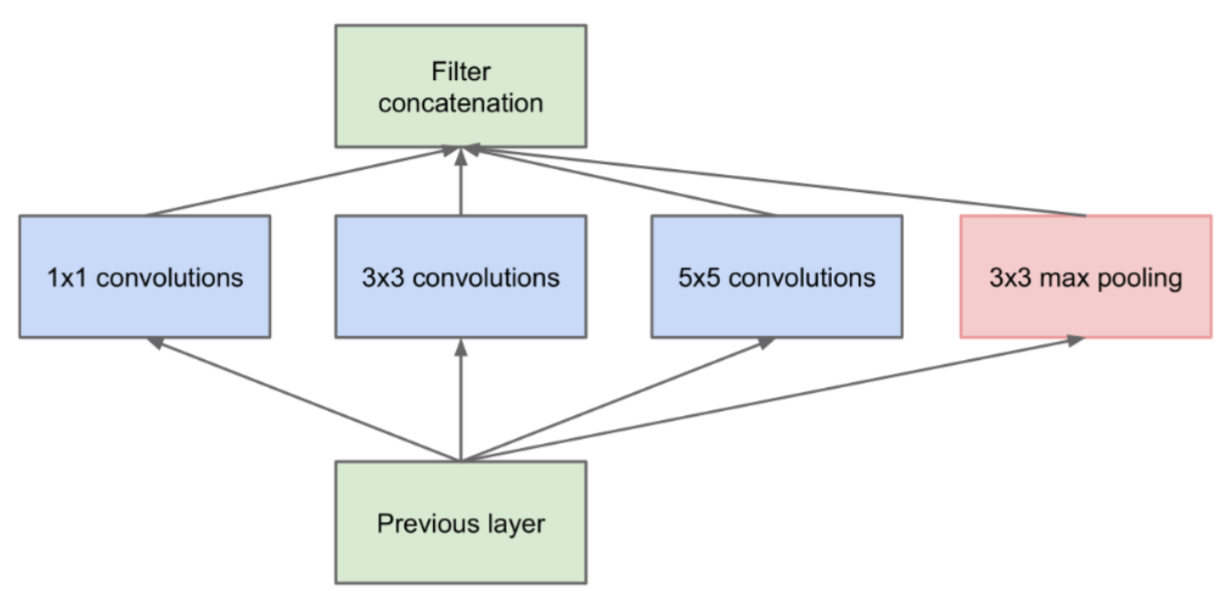
)3、GoogleNet
2014年提出,整体上看,GoogleNet有更加复杂的网络结构,不过它的底层依然和CNN相同。它的特点是,引入
了“Inception结构”,使得网络不仅纵向上有深度,在横向上也有深度。
import torchvision.models as models
# GoogleNet
googlenet = models.googlenet(init_weights=True)
print(googlenet)
GoogLeNet(
(conv1): BasicConv2d(
(conv): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(maxpool1): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=True)
(conv2): BasicConv2d(
(conv): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(conv3): BasicConv2d(
(conv): Conv2d(64, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(maxpool2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=True)
(inception3a): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(192, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(192, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(96, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(192, 16, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(16, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(192, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(inception3b): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(128, 192, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(256, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(32, 96, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(maxpool3): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=True)
(inception4a): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(480, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(480, 96, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(96, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(96, 208, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(208, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(480, 16, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(16, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(16, 48, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(48, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(480, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(inception4b): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(512, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(512, 112, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(112, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(112, 224, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(224, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(512, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(24, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(24, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(512, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(inception4c): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(512, 24, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(24, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(24, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(512, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(inception4d): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(512, 112, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(112, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(512, 144, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(144, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(144, 288, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(288, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(512, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(512, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(inception4e): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(528, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(528, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(160, 320, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(320, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(528, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(32, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(528, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(maxpool4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=True)
(inception5a): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(832, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(256, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(832, 160, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(160, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(160, 320, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(320, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(832, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(32, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(832, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(inception5b): Inception(
(branch1): BasicConv2d(
(conv): Conv2d(832, 384, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(branch2): Sequential(
(0): BasicConv2d(
(conv): Conv2d(832, 192, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(192, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(192, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(384, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch3): Sequential(
(0): BasicConv2d(
(conv): Conv2d(832, 48, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(48, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicConv2d(
(conv): Conv2d(48, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
(branch4): Sequential(
(0): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=True)
(1): BasicConv2d(
(conv): Conv2d(832, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
(aux1): InceptionAux(
(conv): BasicConv2d(
(conv): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(fc1): Linear(in_features=2048, out_features=1024, bias=True)
(fc2): Linear(in_features=1024, out_features=1000, bias=True)
(dropout): Dropout(p=0.7, inplace=False)
)
(aux2): InceptionAux(
(conv): BasicConv2d(
(conv): Conv2d(528, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(128, eps=0.001, momentum=0.1, affine=True, track_running_stats=True)
)
(fc1): Linear(in_features=2048, out_features=1024, bias=True)
(fc2): Linear(in_features=1024, out_features=1000, bias=True)
(dropout): Dropout(p=0.7, inplace=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(dropout): Dropout(p=0.2, inplace=False)
(fc): Linear(in_features=1024, out_features=1000, bias=True)
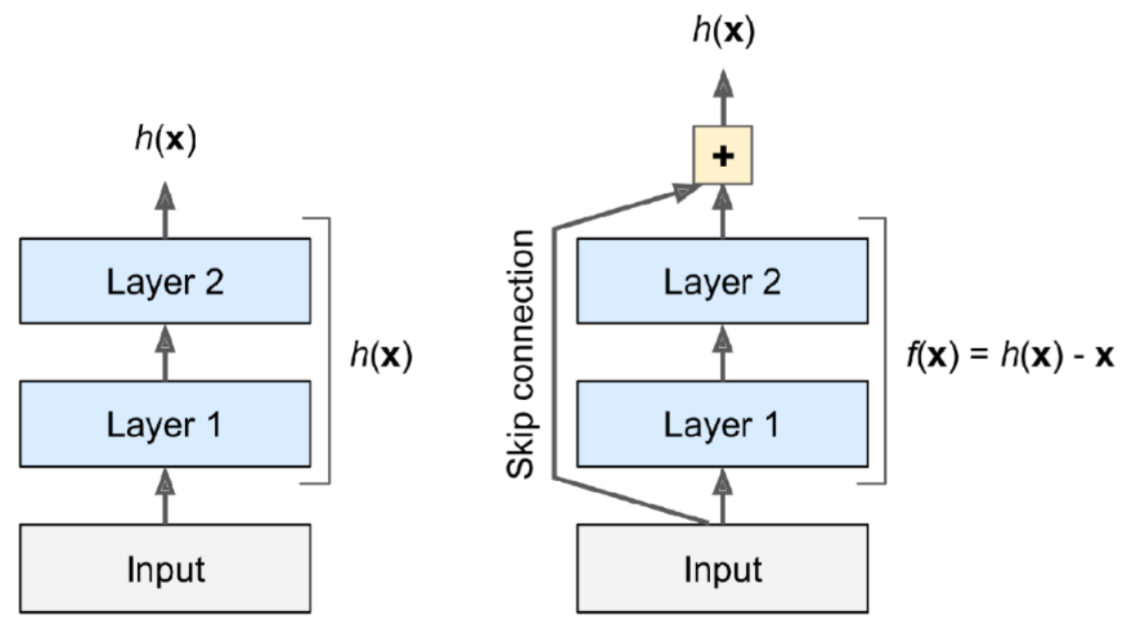
)4、ResNet
2015年由微软团队(何恺明等人)提出,比之前的网络具有更深的结构。为了解决深度网络的梯
度消失问题,ResNet以VGG为基础,引入了“快捷结构”。这样一来,网络学习的目标就由原始的
输出ℎ(𝑥)变为了ℎ(𝑥)―𝑥,这被称为“残差学习”;引入的这个恒等映射被称为“残差连接”(或者“跳
跃连接”),这种网络结构也被称为“残差网络”(Residual Network,ResNet)。
import torchvision.models as models
# ResNet
resnet50 = models.resnet50()
print(resnet50)
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)五、服装分类案例
数据集:
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
import torch
from torch import nn, optim
import pandas as pd
import matplotlib.pyplot as plt
from torch.utils.data import DataLoader,TensorDataset
# 从文件读取数据
fashion_train = pd.read_csv('data/fashion-mnist_train.csv')
fashion_test = pd.read_csv('data/fashion-mnist_test.csv')
# 分离特征和标签
x_train = fashion_train.iloc[:,1:].values
y_train = fashion_train.iloc[:,0].values
x_test = fashion_test.iloc[:,1:].values
y_test = fashion_test.iloc[:,0].values
print(x_train.shape,y_train.shape,x_test.shape,y_test.shape)
# 转换为图像数据的张量形式
x_train = torch.tensor(x_train,dtype = torch.float).reshape(-1,1,28,28)
x_test = torch.tensor(x_test,dtype = torch.float).reshape(-1,1,28,28)
y_train = torch.tensor(y_train,dtype = torch.int64)
y_test = torch.tensor(y_test,dtype = torch.int64)
print(x_train.shape,y_train.shape,x_test.shape,y_test.shape)
# plt.imshow(x_train[12345,0],cmap='gray')
# plt.show()
# print(y_train[12345])
# 构建数据集
train_dataset = TensorDataset(x_train,y_train)
test_dataset = TensorDataset(x_test,y_test)
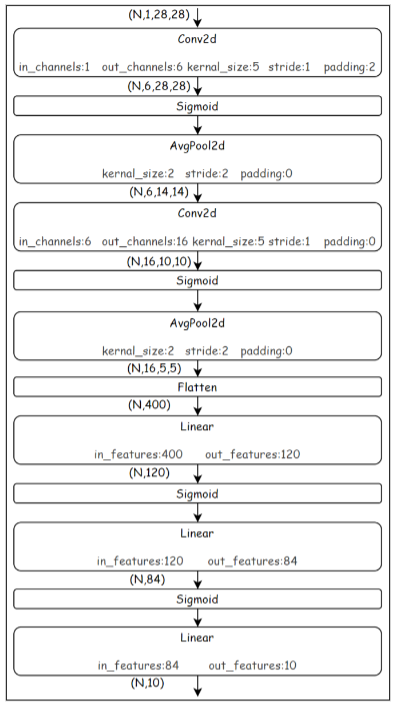
# 构建CNN模型
model = nn.Sequential(
nn.Conv2d(1,6,kernel_size = 5,padding = 2), # stride默认是1
nn.Sigmoid(),
nn.AvgPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(6,16,kernel_size = 5), # padding默认是0,stride默认是1
nn.Sigmoid(),
nn.AvgPool2d(kernel_size = 2,stride = 2),
nn.Flatten(), # 拉平
nn.Linear(16*5*5, 120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, 10),
)
# 给模型一个输入数据,做前向传播
x = torch.rand(1,1,28,28)
for layer in model:
x = layer(x)
print(f'{layer.__class__.__name__:<12}:output shape: {x.shape}')
# 初始化模型参数
def init_weights(layer):
if isinstance(layer,nn.Linear) or isinstance(layer,nn.Conv2d):
nn.init.xavier_uniform_(layer.weight)
model.apply(init_weights)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model.to(device)
lr = 0.01
batch_size = 256
epoch_num = 20
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size)
optimizer = optim.Adam(model.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
for epoch in range(epoch_num):
model.train()
train_loss = 0
train_correct_num = 0 # 累加训练预测准确数量
for i,(X,y) in enumerate(train_loader):
X,y = X.to(device),y.to(device)
output = model(X)
loss_value = loss(output, y)
loss_value.backward()
optimizer.step()
optimizer.zero_grad()
train_loss += loss_value.item() * X.shape[0]
y_pred = output.argmax(dim = 1)
train_correct_num += y_pred.eq(y).sum().item()
# 打印进度条
print(f'\repoch:{epoch + 1:0>2}[{'=' * int((i+1)/len(train_loader) * 50):<50}]',end = '')
this_loss = train_loss / len(train_dataset)
this_train_acc = train_correct_num / len(train_dataset)
model.eval()
test_correct_num = 0
with torch.no_grad():
for X,y in test_loader:
X,y = X.to(device),y.to(device)
output = model(X)
y_pred = output.argmax(dim=1)
test_correct_num += y_pred.eq(y).sum().item()
this_test_acc = test_correct_num / len(test_dataset)
print(f'train loss:{this_loss:.6f},train acc:{this_train_acc:.6f},test acc:{this_test_acc:.6f}')
test_img = x_test[666,0] # 原始图像数据
plt.imshow(test_img,cmap='gray')
plt.show()
test_data = x_test[666].unsqueeze(0).to(device) # 输入数据
test_label = y_test[666] # 真实标签
print('真实分类标签:',test_label)
output = model(test_data)
pred_label = output.argmax(dim = 1)
print('预测分类标签:',pred_label)
(60000, 784) (60000,) (10000, 784) (10000,)
torch.Size([60000, 1, 28, 28]) torch.Size([60000]) torch.Size([10000, 1, 28, 28]) torch.Size([10000])
Conv2d :output shape: torch.Size([1, 6, 28, 28])
Sigmoid :output shape: torch.Size([1, 6, 28, 28])
AvgPool2d :output shape: torch.Size([1, 6, 14, 14])
Conv2d :output shape: torch.Size([1, 16, 10, 10])
Sigmoid :output shape: torch.Size([1, 16, 10, 10])
AvgPool2d :output shape: torch.Size([1, 16, 5, 5])
Flatten :output shape: torch.Size([1, 400])
Linear :output shape: torch.Size([1, 120])
Sigmoid :output shape: torch.Size([1, 120])
Linear :output shape: torch.Size([1, 84])
Sigmoid :output shape: torch.Size([1, 84])
Linear :output shape: torch.Size([1, 10])
epoch:01[==================================================]train loss:0.833675,train acc:0.682483,test acc:0.807700
epoch:02[==================================================]train loss:0.435681,train acc:0.836300,test acc:0.853100
epoch:03[==================================================]train loss:0.373496,train acc:0.860683,test acc:0.866700
epoch:04[==================================================]train loss:0.346593,train acc:0.869700,test acc:0.872100
epoch:05[==================================================]train loss:0.320640,train acc:0.878400,test acc:0.883800
epoch:06[==================================================]train loss:0.301845,train acc:0.886800,test acc:0.887500
epoch:07[==================================================]train loss:0.291466,train acc:0.889617,test acc:0.887300
epoch:08[==================================================]train loss:0.277937,train acc:0.894767,test acc:0.889400
epoch:09[==================================================]train loss:0.267323,train acc:0.899417,test acc:0.893900
epoch:10[==================================================]train loss:0.261846,train acc:0.901000,test acc:0.888800
epoch:11[==================================================]train loss:0.257499,train acc:0.902550,test acc:0.893800
epoch:12[==================================================]train loss:0.246977,train acc:0.906817,test acc:0.897900
epoch:13[==================================================]train loss:0.241031,train acc:0.908367,test acc:0.900700
epoch:14[==================================================]train loss:0.236794,train acc:0.911150,test acc:0.899600
epoch:15[==================================================]train loss:0.232482,train acc:0.912850,test acc:0.901000
epoch:16[==================================================]train loss:0.226054,train acc:0.914650,test acc:0.904100
epoch:17[==================================================]train loss:0.217337,train acc:0.918233,test acc:0.901700
epoch:18[==================================================]train loss:0.217849,train acc:0.917917,test acc:0.900500
epoch:19[==================================================]train loss:0.211551,train acc:0.920300,test acc:0.904400
epoch:20[==================================================]train loss:0.205799,train acc:0.922717,test acc:0.902100
真实分类标签: tensor(7)
预测分类标签: tensor([7], device='cuda:0')
day11 14

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)