深度学习篇---DehazeNet全局去雾算法:给照片戴上“智能去雾眼镜”
·
DehazeNet全局去雾算法:给照片戴上“智能去雾眼镜”
想象一下:你戴上一副智能去雾眼镜,透过浓雾看风景。这副眼镜能自动分析整张照片的雾浓度,然后全局统一调整,让整张照片都变得清晰。这就是DehazeNet的思想!
一、核心问题:雾是什么?
雾的物理模型(大气散射模型)
科学家发现,雾天照片可以用一个简单公式表示:
观察到的图像 I(x) = J(x) × t(x) + A × (1 - t(x))
拆解理解:
I(x):我们拍到的雾蒙蒙照片(已知) J(x):清晰的原始场景(我们想求的) t(x):透射率(0~1,雾越浓越接近0) A:大气光(通常是雾的亮度) 简单说:雾照片 = 清晰照片 × 透射率 + 雾的颜色 × (1-透射率)
生活比喻:
-
像透过脏玻璃看风景
-
玻璃越脏(透射率越低),看到的越模糊
-
DehazeNet就是智能清洁工,帮你擦干净玻璃
二、DehazeNet的核心思想
传统方法 vs DehazeNet
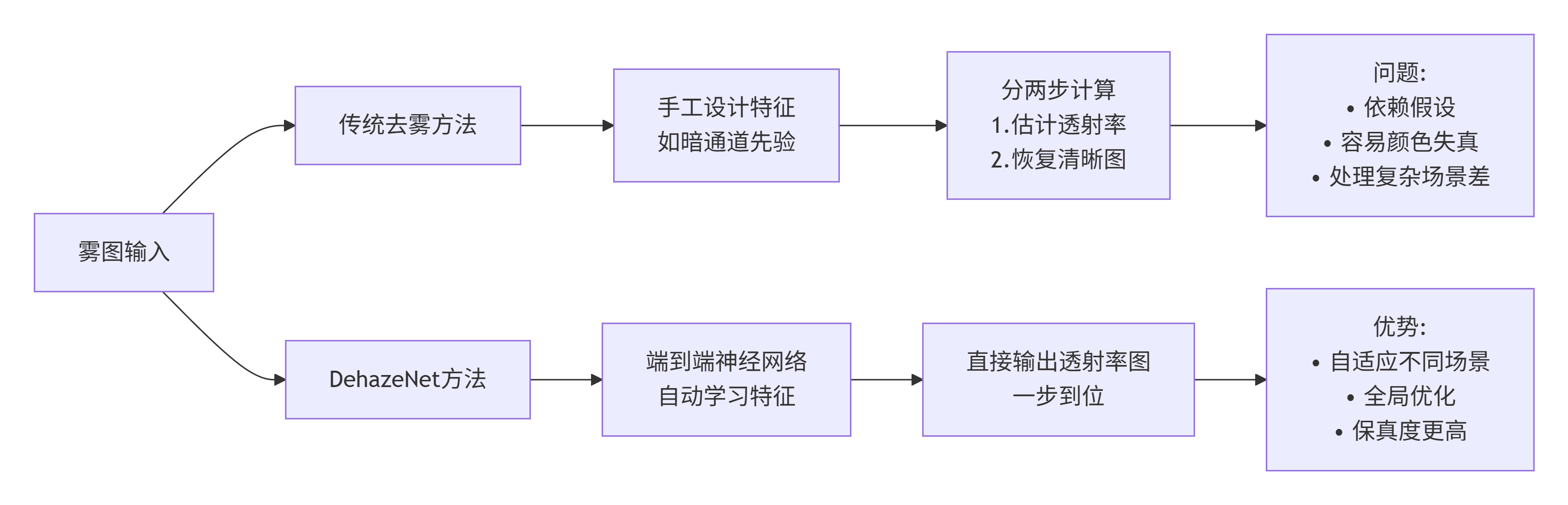
DehazeNet的聪明做法:
不依赖人工规则,让神经网络自己学习: 输入雾图 → 神经网络 → 输出透射率图 → 恢复清晰图 关键是:DehazeNet学的是“全局透射率”, 不是每个像素单独处理,而是看整体雾的分布规律。
三、DehazeNet网络结构:三层理解法
第一层:特征提取层(侦察兵)
# 类似侦察兵收集情报
输入:雾图(RGB三通道)
输出:多尺度特征(看到不同粗细的雾)
实现:多个并行的卷积层,用不同大小的卷积核
- 小卷积核(3×3):看细雾、薄雾
- 中卷积核(5×5):看中等雾
- 大卷积核(7×7):看厚雾、全局雾分布第二层:特征融合层(情报分析中心)
# 把不同侦察兵的情报汇总分析
输入:多尺度特征
过程:把所有特征拼接起来,分析相互关系
输出:融合后的雾浓度特征图
关键:使用1×1卷积进行通道融合
就像指挥官把各部队报告汇总,找出规律第三层:非线性回归层(决策指挥官)
# 做出最终判断:每个位置的透射率是多少
输入:融合后的特征
过程:多层全连接网络,全局考虑
输出:透射率图(0~1之间的值)
特点:这里用了一个特殊的激活函数BReLU
BReLU = 把输出限制在0~1之间(因为透射率只能是这个范围)网络结构简化图:

四、DehazeNet的三大创新点
创新1:端到端学习
传统:手工设计规则 → 估计透射率 → 恢复图像
(容易出错) (分两步,误差累积)
DehazeNet:雾图 → 神经网络 → 透射率 → 清晰图
(自动学习) (一步到位,全局优化)
创新2:多尺度特征提取
就像医生诊断: - 用放大镜看局部(小卷积核) - 用肉眼整体看(中卷积核) - 站远看全局(大卷积核) 结合起来,才能准确判断雾的分布
创新3:BReLU激活函数
# 传统ReLU:输出可以是0到无穷大
# 但透射率只能是0~1!
# BReLU(双边限制线性单元):
def BReLU(x):
# 下限限制:不能小于0
x = max(0, x)
# 上限限制:不能大于1
x = min(1, x)
return x
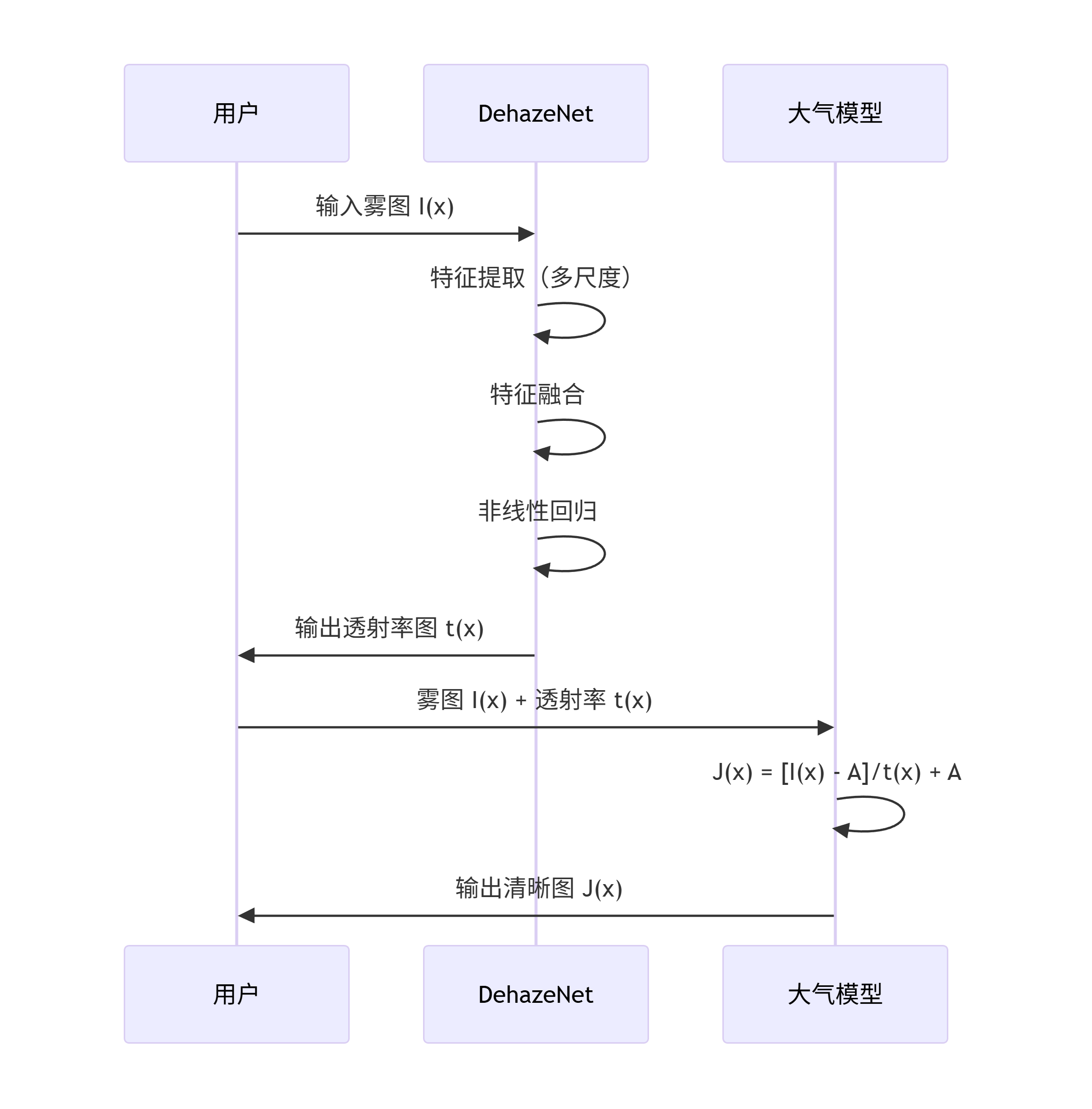
# 物理意义:保证透射率符合现实五、工作流程详解
完整去雾流程:
关键步骤:估计大气光A
大气光A通常是图像中最亮的像素值 (因为雾本身是白色的,会提高亮度) DehazeNet的做法: 1. 取透射率最小的前0.1%像素 2. 在这些像素对应的原图位置中 3. 找亮度最大的值作为A
恢复清晰图像公式:
def recover_clear_image(I, t, A):
"""
I: 雾图 (0~255)
t: 透射率图 (0~1)
A: 大气光值 (标量,如240)
公式:J = (I - A) / t + A
但为了防止除以0和溢出,实际:
"""
# 限制t的最小值(如0.1),避免除以0
t = np.maximum(t, 0.1)
# 恢复清晰图像
J = (I - A) / t[:, :, np.newaxis] + A
# 限制到0~255范围
J = np.clip(J, 0, 255)
return J.astype(np.uint8)六、DehazeNet的优势
与传统方法对比:
| 对比维度 | 传统方法(如暗通道) | DehazeNet |
|---|---|---|
| 原理 | 基于物理假设(暗通道先验) | 数据驱动,自动学习 |
| 适应性 | 对天空等亮区域失效 | 能处理各种场景 |
| 颜色保真 | 容易颜色失真 | 颜色更自然 |
| 计算复杂度 | 中等 | 一次前向传播,速度快 |
| 需要调参 | 需要手动调多个参数 | 训练好后无需调参 |
实际效果示例:
场景1:城市雾景 传统方法:天空区域出现色斑 DehazeNet:天空过渡自然,建筑细节清晰 场景2:森林晨雾 传统方法:树叶边缘有光环效应 DehazeNet:细节保留完整,色彩真实 场景3:浓雾人像 传统方法:人脸颜色发青 DehazeNet:肤色恢复自然
七、DehazeNet的局限性
仍然存在的挑战:
-
浓雾极限:雾太浓时(能见度<50米),信息已丢失,难以完美恢复
-
非均匀雾:如果雾的浓度在图像中变化很大,全局假设可能不成立
-
夜景雾图:夜间雾的物理模型不同,需要专门训练
-
计算资源:虽然比一些传统方法快,但仍需要GPU加速
改进方向:
DehazeNet(2016) → AOD-Net(2017) → GridDehazeNet(2019)
↓ ↓ ↓
端到端学习 联合估计A和t 网格状结构,处理非均匀雾
八、实战应用
使用预训练模型:
import torch
import torchvision.transforms as transforms
from PIL import Image
def dehaze_with_dehazenet(image_path, model_path):
# 1. 加载图像
image = Image.open(image_path).convert('RGB')
# 2. 预处理
transform = transforms.Compose([
transforms.Resize((480, 640)), # DehazeNet训练尺寸
transforms.ToTensor(),
])
input_tensor = transform(image).unsqueeze(0) # [1, 3, H, W]
# 3. 加载预训练模型
model = DehazeNet()
model.load_state_dict(torch.load(model_path))
model.eval() # 评估模式
# 4. 前向传播
with torch.no_grad():
transmission_map = model(input_tensor) # 得到透射率图
# 5. 估计大气光
A = estimate_atmospheric_light(input_tensor, transmission_map)
# 6. 恢复清晰图像
clear_image = recover_image(input_tensor, transmission_map, A)
return clear_image, transmission_map训练自己的DehazeNet:
class DehazeNet(nn.Module):
def __init__(self):
super(DehazeNet, self).__init__()
# 特征提取层
self.conv1 = nn.Conv2d(3, 16, 3, padding=1)
self.conv2 = nn.Conv2d(3, 16, 5, padding=2)
self.conv3 = nn.Conv2d(3, 16, 7, padding=3)
# 特征融合层
self.fusion = nn.Sequential(
nn.Conv2d(48, 16, 1), # 1×1卷积降维
nn.ReLU(),
)
# 非线性回归层
self.regression = nn.Sequential(
nn.Linear(16*H*W, 128),
nn.ReLU(),
nn.Linear(128, H*W), # 输出透射率图
BReLU() # 自定义激活函数
)
def forward(self, x):
# 多尺度特征提取
feat1 = F.relu(self.conv1(x))
feat2 = F.relu(self.conv2(x))
feat3 = F.relu(self.conv3(x))
# 特征拼接
fused = torch.cat([feat1, feat2, feat3], dim=1)
fused = self.fusion(fused)
# 展平,全连接
batch_size = fused.size(0)
flattened = fused.view(batch_size, -1)
# 回归透射率
transmission = self.regression(flattened)
transmission = transmission.view(batch_size, 1, H, W)
return transmission
# 自定义BReLU
class BReLU(nn.Module):
def forward(self, x):
return torch.clamp(x, 0, 1) # 限制在0~1九、DehazeNet的思想延伸
超越去雾:同一思想的其他应用
DehazeNet的核心思想是: “用神经网络学习逆物理模型参数” 同样思想可用于: 1. 水下图像增强(学习水的吸收系数) 2. 雨滴去除(学习雨滴的遮挡模型) 3. 阴影去除(学习光照传输模型) 4. 老照片修复(学习退化模型)
与最新技术的结合:
# DehazeNet + 注意力机制
# 让网络更关注雾浓的区域
# DehazeNet + GAN(生成对抗网络)
# 用判别器判断去雾效果是否真实
# DehazeNet + 物理约束
# 在损失函数中加入物理模型约束十、总结:DehazeNet的精髓
一句话总结:
DehazeNet = 用深度学习“猜”出雾的浓度图,然后用物理公式“算”回清晰图
三大核心:
-
端到端学习:不依赖人工特征,让数据说话
-
多尺度分析:既看局部细节,又看全局分布
-
物理模型指导:不是蛮力恢复,而是基于大气散射模型
使用建议:
什么时候用DehazeNet? - 图像有均匀的雾霾 - 需要快速批量处理 - 要求颜色自然保真 什么时候考虑其他方法? - 雾非常不均匀 - 夜景或特殊光照 - 有大量同类数据可训练专用模型
最后记住:
雾图恢复就像破案: 证据(雾图) + 物理规律(散射模型) + 智能推理(神经网络) = 真相(清晰场景) DehazeNet就是那个聪明的侦探, 通过全局分析,还原被雾隐藏的真相!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 15
15 0
0- 0



 已为社区贡献190条内容
已为社区贡献190条内容

所有评论(0)