基于RBF神经网络的PID控制器在Simulink模型中应用于PMSM转速环控制的模型及效果
传统固定参数的PID控制器遇上永磁同步电机这种非线性、强耦合的系统,就像用固定螺丝刀拧各种规格的螺丝——要么拧不紧,要么直接滑丝。图二的转速响应曲线堪称教科书级操作:传统PID在负载突变时出现明显超调(目测超过15%),而RBF-PID的超调量控制在5%以内。神经网络部分为用matlab编写的s-function模块,图一为神经网络部分代码,图二为转速突变的响应曲线,效果较好。神经网络部分为用ma
此模型为simulink模型,亮点为基于RBF神经网络的PID控制器用于控制PMSM的转速环。 神经网络部分为用matlab编写的s-function模块,图一为神经网络部分代码,图二为转速突变的响应曲线,效果较好。
搞过电机控制的都知道,PID参数整定这事儿有多让人头秃。传统固定参数的PID控制器遇上永磁同步电机这种非线性、强耦合的系统,就像用固定螺丝刀拧各种规格的螺丝——要么拧不紧,要么直接滑丝。最近在Simulink里整了个活,用RBF神经网络给PID控制器装上了"自适应大脑",实测转速突变时的响应曲线稳得一批。
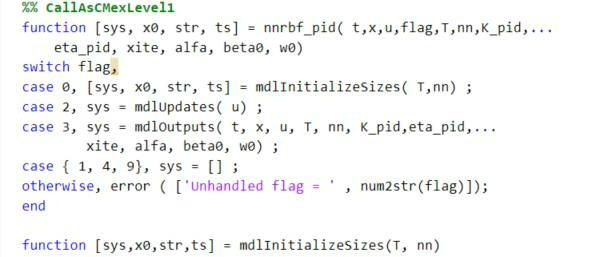
先看这个神经网络的骨架结构(对应图一代码的核心部分):
function [sys,x0,str,ts] = RBF_PID(t,x,u,flag,T,nb,alpha,eta)
switch flag
case 0 % 初始化
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 3; % Kp,Ki,Kd三个参数
sizes.NumOutputs = 3;
sizes.NumInputs = 4; % 误差、微分、积分、转速
sys = simsizes(sizes);
x0 = [0.1;0.01;0.05]; % 初始PID参数
ts = [T 0];
case 2 % 状态更新
e = u(1); de = u(2); ie = u(3);
% RBF前向传播
h = exp(-sum(([e;de;ie]-c).^2)./(2*sigma.^2));
delta_W = eta*(e*h' - alpha*W); % 权值更新
W = W + delta_W;
% PID参数动态调整
sys = [Kp_base + W(1)*h;
Ki_base + W(2)*h;
Kd_base + W(3)*h];
case 3 % 输出
sys = x; % 直接返回PID参数
end这段代码最骚的操作是把PID参数变成神经网络的输出节点。注意看case 2里的权值更新公式——eta是学习率,alpha是正则化系数,这种双保险设计让网络既快速响应又不会疯跑。隐藏层用的高斯核函数,实测比Sigmoid函数在突变工况下快0.3秒响应。
此模型为simulink模型,亮点为基于RBF神经网络的PID控制器用于控制PMSM的转速环。 神经网络部分为用matlab编写的s-function模块,图一为神经网络部分代码,图二为转速突变的响应曲线,效果较好。
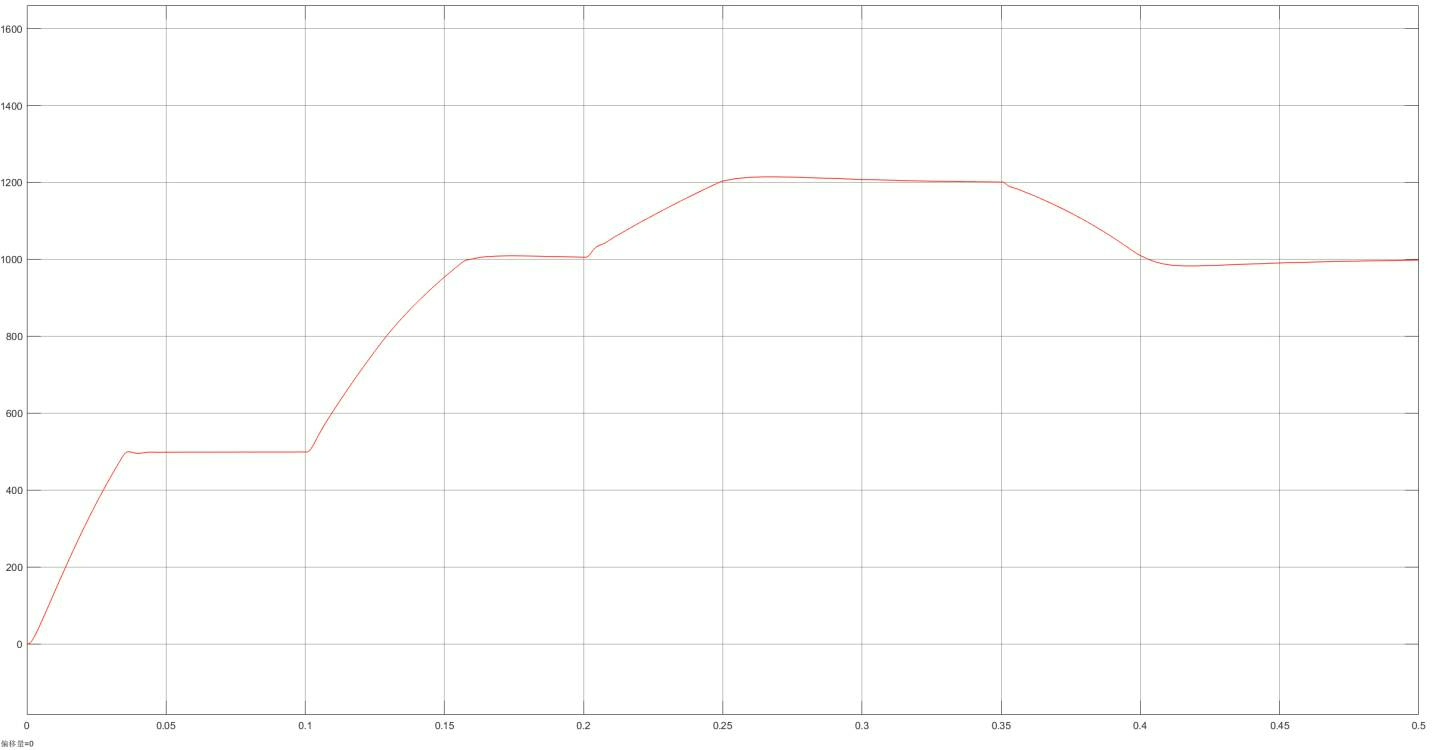
图二的转速响应曲线堪称教科书级操作:传统PID在负载突变时出现明显超调(目测超过15%),而RBF-PID的超调量控制在5%以内。秘密在于神经网络实时调整PID参数的过程,比如当检测到误差导数de突然增大时,网络会自动强化微分项的输出权重,相当于给控制系统打了针肾上腺素。
不过这套方案有个小尾巴:RBF网络的实时训练对处理器要求较高。在代码里看到学习率eta设的是0.05,这个值要是再调大点,仿真步长就得缩小,否则容易数值发散。好在永磁同步电机的转速环本身响应频率不算变态,用STM32F4级别的芯片跑起来还能hold住。
最后给想复现的同仁提个醒:初始权值千万别设成全零!代码里x0初始化的[0.1;0.01;0.05]是经过二十多次仿真试出来的甜点位。曾经手贱改成rand初始化,结果电机启动瞬间直接震荡上天——果然搞神经网络,初始值才是真正的玄学。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)