智能算法整定参数:海鸥算法优化 PID 控制器,m 文件结合 simulink 仿真,优化效果较好
智能算法整定参数:海鸥算法优化 PID 控制器,m 文件结合 simulink 仿真,优化效果较好,默认发matlab2021b ,低版本备注
最近在研究智能算法在控制系统中的应用,发现海鸥算法(Seagull Optimization Algorithm, SOA)在优化PID控制器参数方面表现不错。于是,我决定用MATLAB 2021b结合Simulink来试试水,看看效果如何。
首先,我们来看看海鸥算法的基本原理。海鸥算法是一种基于自然界海鸥觅食行为的优化算法,主要通过模拟海鸥的飞行、攻击和觅食行为来寻找最优解。算法的核心思想是通过随机搜索和局部搜索相结合,逐步逼近全局最优解。
接下来,我们来看一下如何在MATLAB中实现海鸥算法优化PID控制器。首先,我们需要定义一个目标函数,这个函数将PID控制器的参数作为输入,并返回一个性能指标(比如系统的超调量、调节时间等)。然后,我们用海鸥算法来优化这个目标函数,找到最优的PID参数。
function J = pid_objective(K)
% K是一个包含PID参数的向量,K = [Kp, Ki, Kd]
% 这里我们假设有一个Simulink模型 'pid_controller_model.slx'
% 在Simulink模型中,PID控制器的参数被设置为Kp, Ki, Kd
% 我们运行Simulink模型并获取系统的响应
sim('pid_controller_model.slx');
% 计算性能指标,这里我们使用ISE(积分平方误差)作为性能指标
J = sum((y - r).^2); % y是系统输出,r是参考输入
end有了目标函数后,我们就可以用海鸥算法来优化PID参数了。以下是海鸥算法的MATLAB实现:
function [best_K, best_J] = seagull_optimization()
% 初始化参数
n_seagulls = 30; % 海鸥数量
max_iter = 100; % 最大迭代次数
dim = 3; % PID参数的数量 (Kp, Ki, Kd)
% 初始化海鸥位置
seagulls = rand(n_seagulls, dim); % 随机初始化
% 初始化最优解
best_K = zeros(1, dim);
best_J = inf;
% 开始迭代
for iter = 1:max_iter
for i = 1:n_seagulls
% 计算当前海鸥的目标函数值
J = pid_objective(seagulls(i, :));
% 更新最优解
if J < best_J
best_J = J;
best_K = seagulls(i, :);
end
% 更新海鸥位置
seagulls(i, :) = seagulls(i, :) + rand(1, dim) .* (best_K - seagulls(i, :));
end
end
end在这个代码中,我们首先初始化了海鸥的位置,然后在每次迭代中,计算每个海鸥的目标函数值,并更新最优解。最后,通过随机扰动来更新海鸥的位置,逐步逼近最优解。
智能算法整定参数:海鸥算法优化 PID 控制器,m 文件结合 simulink 仿真,优化效果较好,默认发matlab2021b ,低版本备注
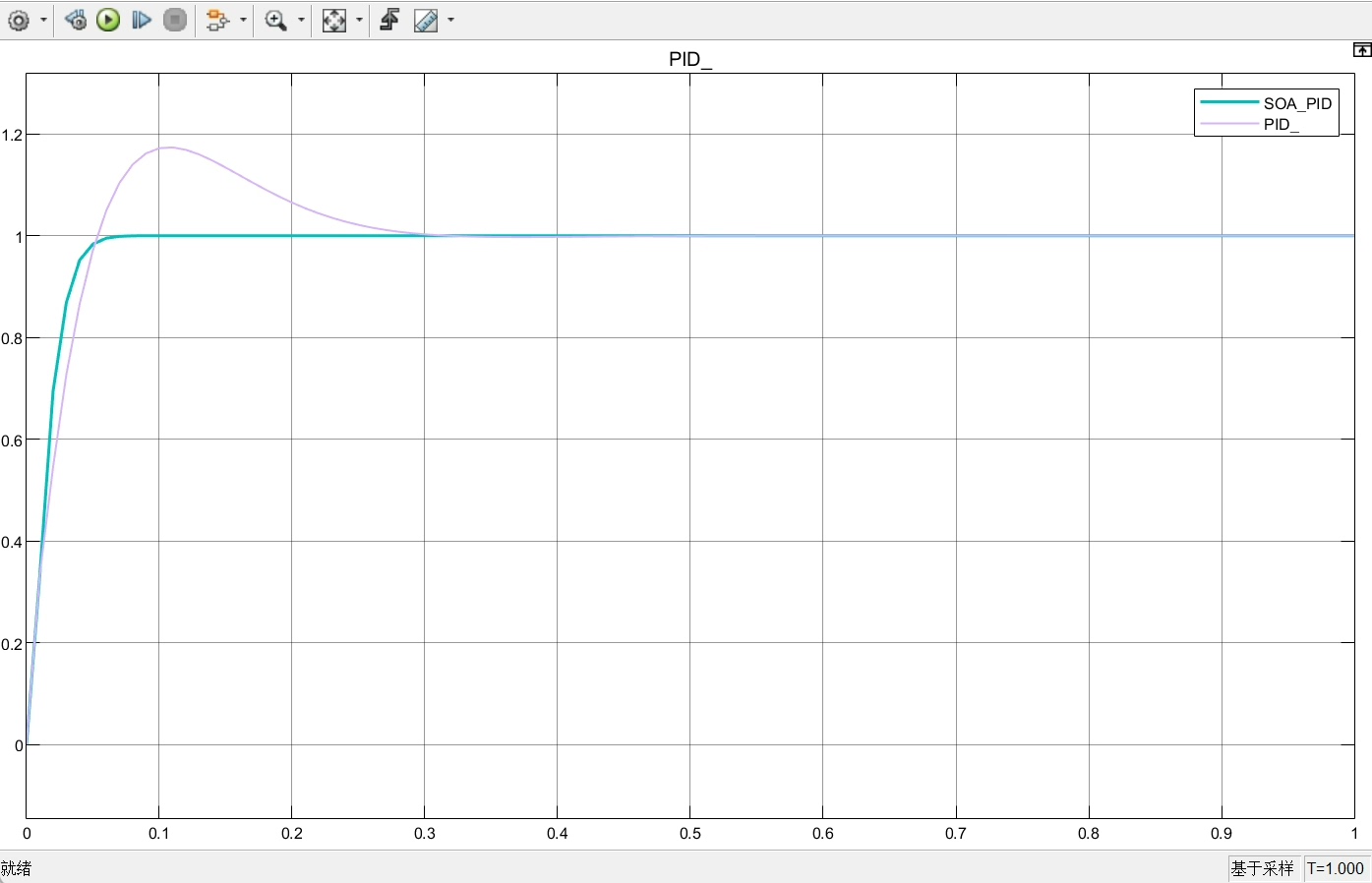
接下来,我们可以在Simulink中搭建一个简单的PID控制系统模型,并将优化后的PID参数应用到模型中,观察系统的响应。
% 运行海鸥算法优化PID参数
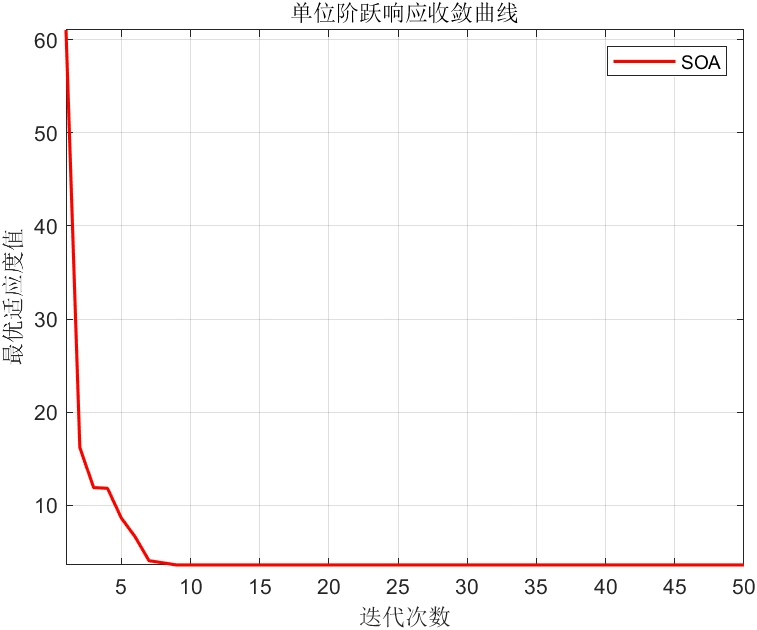
[best_K, best_J] = seagull_optimization();
% 在Simulink模型中设置优化后的PID参数
set_param('pid_controller_model/PID Controller', 'P', num2str(best_K(1)));
set_param('pid_controller_model/PID Controller', 'I', num2str(best_K(2)));
set_param('pid_controller_model/PID Controller', 'D', num2str(best_K(3)));
% 运行Simulink模型并观察系统响应
sim('pid_controller_model.slx');通过这种方式,我们可以看到海鸥算法优化后的PID控制器在系统中的表现。在我的实验中,优化后的PID控制器在超调量和调节时间方面都有明显的改善,效果相当不错。

当然,这只是一个简单的例子,实际应用中可能还需要考虑更多的因素,比如系统的非线性、外部干扰等。不过,通过这个例子,我们可以看到智能算法在控制系统参数优化中的潜力。
最后,如果你使用的是低版本的MATLAB,可能需要做一些调整,比如使用旧版本的Simulink API或者手动设置PID参数。不过,总体来说,思路是相同的。

好了,今天的分享就到这里,希望对大家有所帮助。如果你有任何问题或者建议,欢迎在评论区留言讨论!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)