IEEE Transactions on Industrial Electronics | 一个模块,拼出爬行、抓取和机械臂:这篇论文把软体折纸机器人做活了
软体机器人这些年并不少见,但真正同时做到模块化、无线、闭环控制和可重构应用的工作,其实并不多。很多系统要么依赖外部气源或线缆,要么单模块自由度有限,要么能变形却不容易精确控制。
论文信息
英文题目:Design and Control of a Modular, Untethered Soft Origami Robot Driven by SMA Coils
中文题目: 基于 SMA线圈驱动的模块化无线软体折纸机器人设计与控制
作者:Qiqiang Hu,Zhenlin Chen,Erbao Dong,Dong Sun
作者单位: 香港城市大学生物医学工程系,中国科学技术大学
期刊:IEEE Transactions on Industrial Electronics(IF 7.2 中科院一区,JCR Q1)
发表时间:2025年1月15日
链接:https://doi.org/10.1109/TIE.2024.3519630
引文格式:Hu Q, Chen Z, Dong E, Sun D. Design and Control of a Modular, Untethered Soft Origami Robot Driven by SMA Coils[J]. IEEE Transactions on Industrial Electronics, 2025, 72(8): 8208 - 8218.
01 全文速览
软体机器人这些年并不少见,但真正同时做到模块化、无线、闭环控制和可重构应用的工作,其实并不多。很多系统要么依赖外部气源或线缆,要么单模块自由度有限,要么能变形却不容易精确控制。
这篇论文给出了一条很清晰的路线:先做一个能力完整的折纸软体模块,再让模块之间通过磁吸快速拼接,最终构成不同任务形态的机器人系统。
核心亮点:
✅ 单个模块就具备独立能力。
论文中的折纸模块不是简单结构件,而是集成了 SMA 驱动、IMU 感知、MCU、BLE 通信、电池和无线充电 的独立机器人单元。
✅ 控制不是开环,而是闭环姿态控制。
作者提出了一个基于交叉耦合思想的无模型控制器,实现了单模块双轴姿态的闭环调节。
✅ 模块不是只能展示单一动作。
基于同一模块,可以快速重构出爬行机器人、柔顺夹爪和串联机械臂,分别对应运动、抓取和操作三类任务。
✅ 论文的价值不只在结构设计,也在控制和验证做完整了。
从单模块姿态感知、控制精度、负载能力、抗扰表现,到多模块重构演示,整条证据链是闭合的。
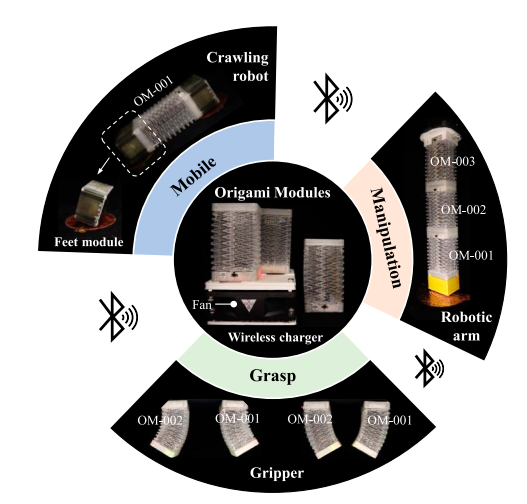
图1: 基于折纸模块构建的多种软体机器人形态,包括爬行机器人、夹爪和机械臂。
如图1所示,这篇论文的核心并不是单做一个软体模块,而是围绕模块的独立性和可拼接性,构建一套面向多任务的重构机器人思路。
02 研究内容
📦 2.1 先看模块本身:它不是“软壳子”,而是完整机器人单元
论文设计的单个模块采用矩形截面的折纸结构,主体材料是 PET 薄膜。相比常见硅胶,PET 的弹性模量高得多,但通过折纸结构设计,仍然可以实现较大的压缩和弯曲变形。
作者给出的模块尺寸约为 41 × 31 × 70 mm,重量 32.7 g,其中折纸主体仅 3.12 g。
更关键的是,模块内部并不空。它集成了:
四个 SMA 线圈执行器、一个九轴 IMU、MCU、BLE 模块、小型风扇、3.7 V 电池、无线充电线圈、磁吸连接结构
这意味着它不是依赖外部系统驱动的“软体段”,而是一个真正意义上的独立模块。
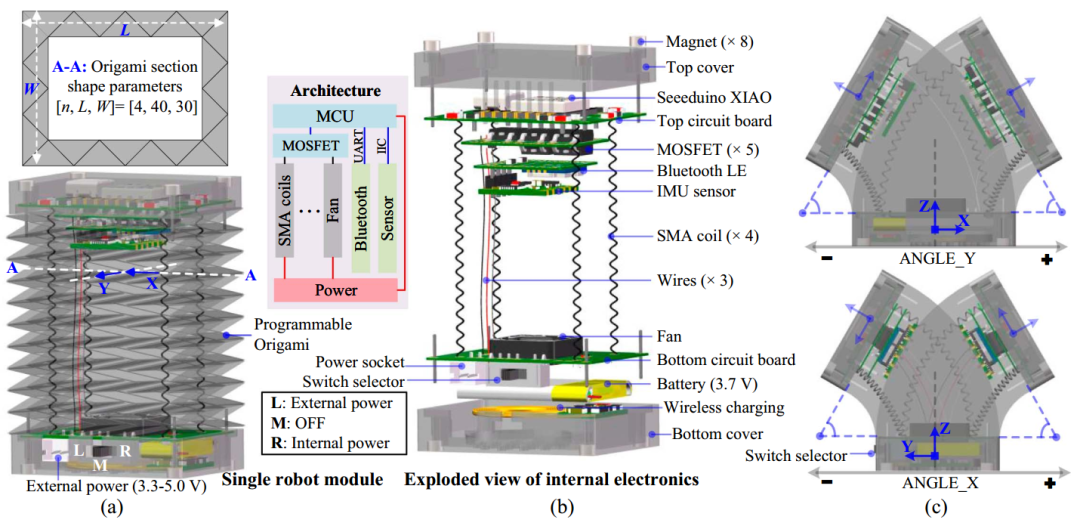
图2: 单个折纸模块的系统总览、内部电子结构爆炸图以及姿态角定义。
图2把模块的核心设计交代得很完整:左边是折纸主体与系统架构,中间是内部电子结构,右边则定义了模块绕 X 轴和 Y 轴的弯曲角。
🧠 2.2 这篇论文最值得看的地方之一,是控制器设计得很克制
很多软体机器人论文一到控制部分,要么只做开环驱动,要么直接上复杂模型。
这篇文章反过来,明确承认折纸软体模块的逆运动学模型很难精确建立,于是干脆走无模型闭环控制。
模块的两个姿态误差记为 (e_1,e_2),分别对应 X 轴和 Y 轴弯曲角误差。作者先构造耦合误差矩阵
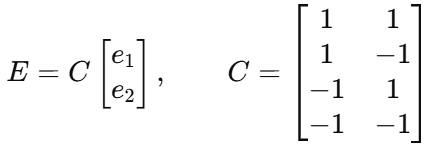
这里的矩阵 C反映四个 SMA 线圈对两个弯曲方向的耦合作用。
然后,用 PID 形式给出四个执行器的占空比矩阵

其中

这套控制结构很有意思。它没有把问题做得过重,而是把交叉耦合和 PID 接起来,用很直接的方式解决了一个双输入四输出的软体模块控制问题。
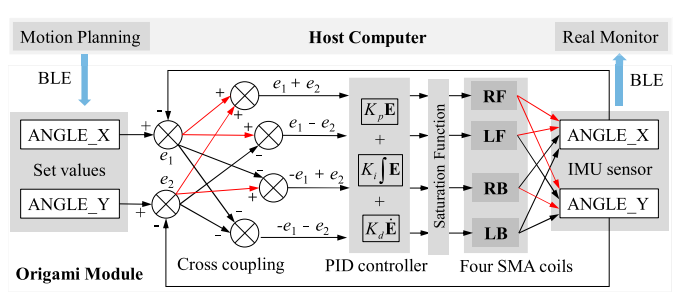
图3: 单模块姿态控制框架,展示交叉耦合控制器如何根据双轴误差生成四个 SMA 线圈的 PWM 占空比。
图3是这篇论文控制部分最关键的一张图。它把双轴误差、交叉耦合矩阵、PID 调节和四个执行器输出之间的关系连成了一条线。
🎯 2.3 单模块到底控得准不准,论文给了几组很扎实的实验
单模块首先被当作一个姿态可控系统来验证。
论文先做了单方向弯曲控制,再做多方向弯曲控制,并用外部视觉角度和 IMU 角度相互印证。
在单轴实验中,模块可以在保持一轴水平的同时,让另一轴从 10°、20°、30° 一直到 50°、55° 逐步跟踪。
在双轴实验中,模块则能沿着一组设定好的二维姿态路径连续变化。
论文给出的稳态误差也比较漂亮。根据表 I:
单方向控制下,IMU 测得的 Angle_X、Angle_Y 平均稳态误差都在 0.1°–0.5° 左右
多方向控制下,误差略有增加,但整体仍保持在较小范围内
这说明控制器并不只是让模块“会动”,而是已经能做到比较细致的姿态控制。
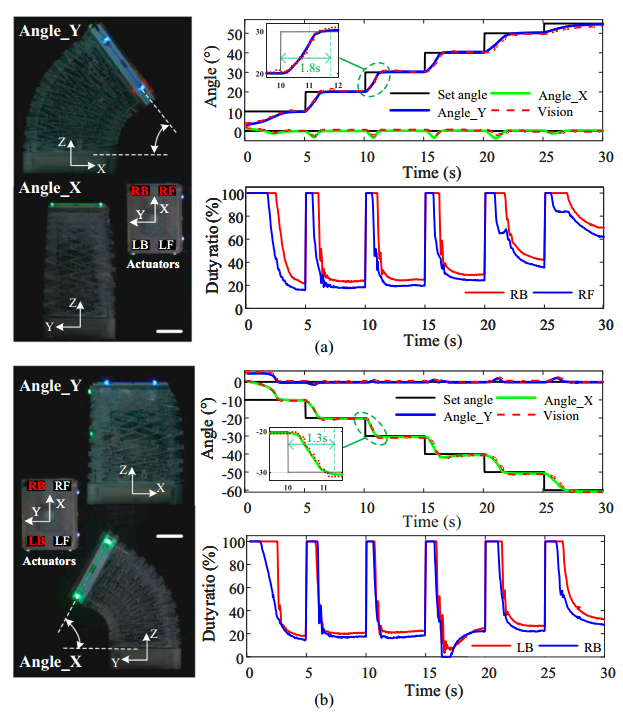
图4: 单方向弯曲控制实验,展示模块在单轴弯曲时的设定角、IMU 反馈角、视觉角以及对应执行器占空比。
图4重点展示单方向控制效果。可以看到,不管是绕 X 轴还是绕 Y 轴弯曲,模块都能稳定跟踪给定角度。
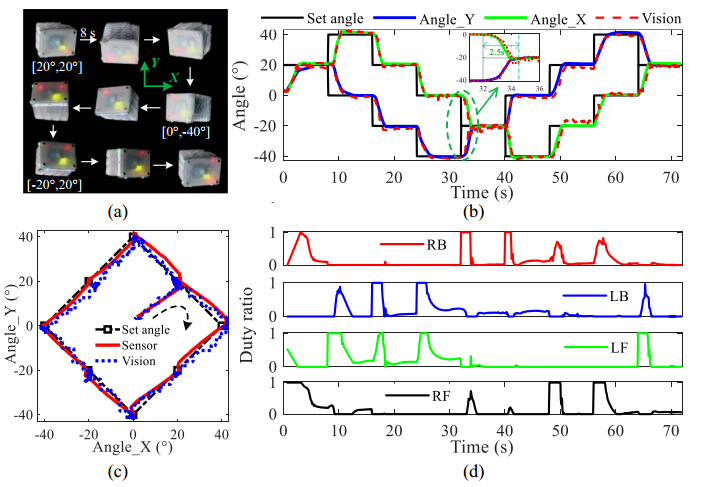
图5: 多方向弯曲控制实验,展示模块在双轴同步弯曲时的姿态跟踪与控制输入。
如果说图4说明模块能在单轴上稳定控制,那么图5对应的多方向实验进一步说明,它已经具备了二维姿态层面的协调控制能力。
🏋️ 2.4 不只是能控,还测了负载和抗扰
论文没有停在无负载姿态控制上,而是继续考察模块在负载和扰动下的表现。
在机械负载实验中,模块在 60 g、80 g、100 g、120 g 负载下进行单轴弯曲控制;在双轴场景下,还测试了 80 g 和 160 g 的负载条件。结果显示,随着负载增加,误差会略有变大,但系统仍保持较高控制精度。
在动态扰动实验中,作者在模块末端逐步挂载动态负载,最大到 90 g,结果表明控制器仍能快速抑制由外部扰动引起的振荡。
这部分很重要,因为很多软体机器人能在静态下工作,但一旦遇到负载变化,性能就会明显下降。
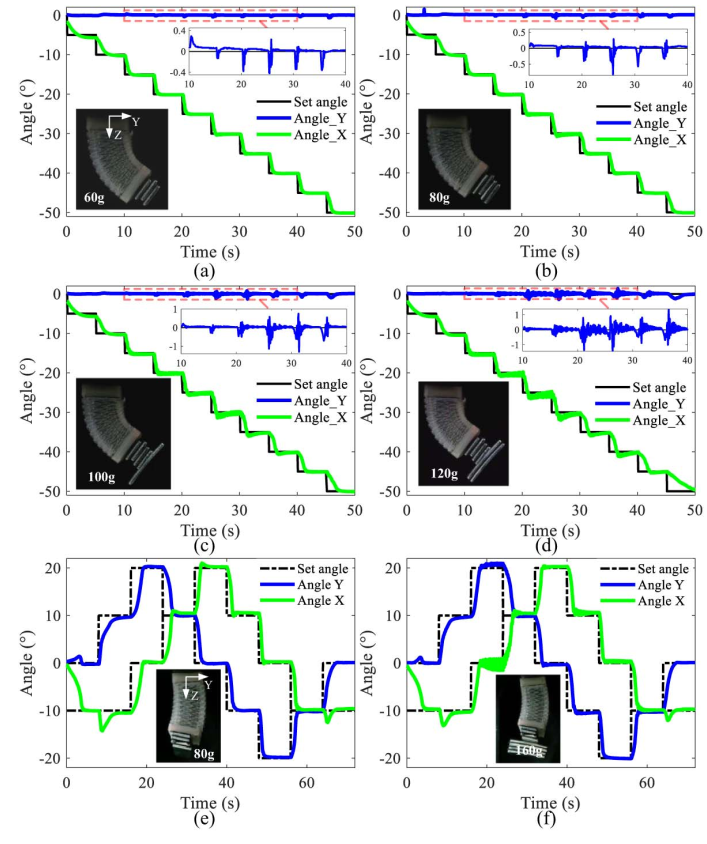
图6: 不同机械负载下的姿态控制实验结果。
图6说明,这个折纸模块并不是只能在轻载或空载条件下工作,在较高负载下仍保有较好的姿态控制能力。
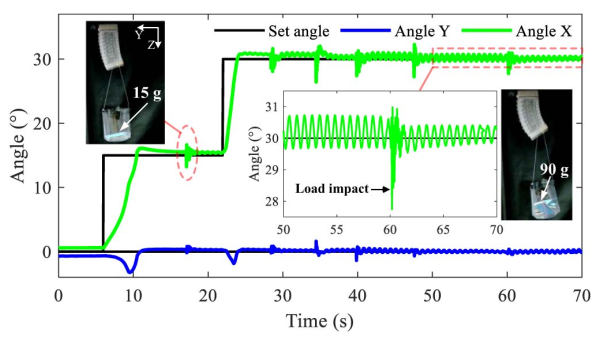
图7: 外部动态扰动下的控制实验结果。
图7展示了模块在外部动态负载扰动下的姿态响应,说明这套控制器具备一定鲁棒性。
🧱 2.5 真正让这篇论文立起来的,是模块重构后的三类机器人
前面的单模块设计和控制,其实都是在为后面的重构应用做准备。论文展示了三类代表性系统。
第一类是爬行机器人。
单个折纸模块加上两个带静电吸附垫的足模块,就能组成无线爬行机器人。它能够在水平面上爬行,也能转向,还能沿倾斜平面向下移动,并通过 IMU 实时估计坡面倾角。
第二类是柔顺夹爪。
两个模块组合后,可以构成一个姿态可调的软体夹爪,用于抓取圆柱体、方块和环形物体。这里最有意思的一点是,它不是靠刚性开合,而是通过模块姿态控制去适应不同物体曲面。
第三类是串联机械臂。
三个模块串联后,可以形成柔顺机械臂。论文展示了其姿态调节、重力补偿,以及结合吸附模块后对物体进行提升和操作的过程。这里虽然还谈不上高精度操作,但已经能看出模块化软体机械臂的雏形。
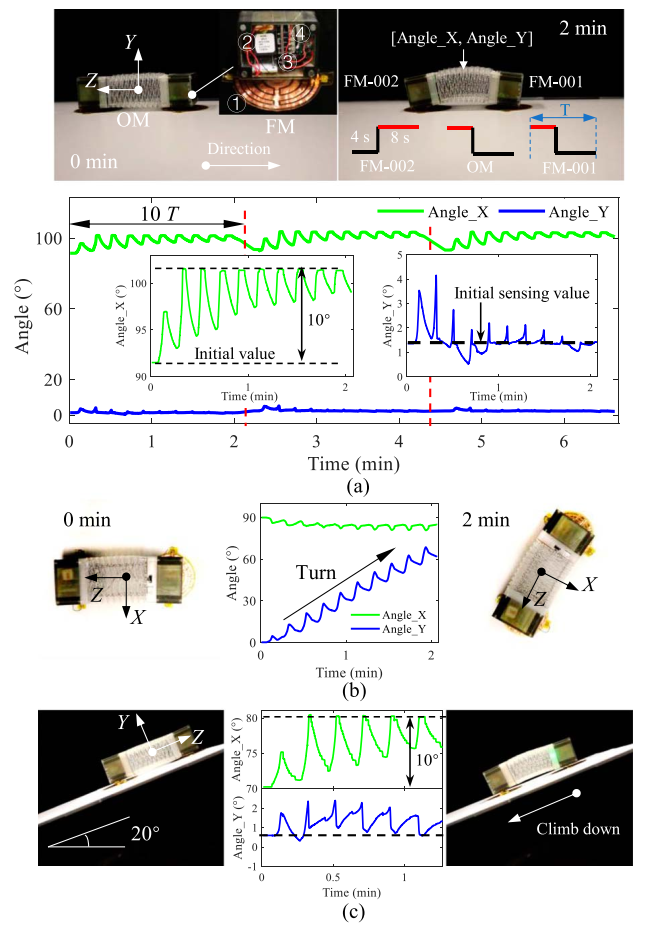
图8: 由单个折纸模块和两个足模块构成的爬行机器人,可实现直线爬行、转向和斜面运动。
图8说明折纸模块从单体姿态控制走向移动平台之后,已经具备较完整的 locomotion 演示能力。
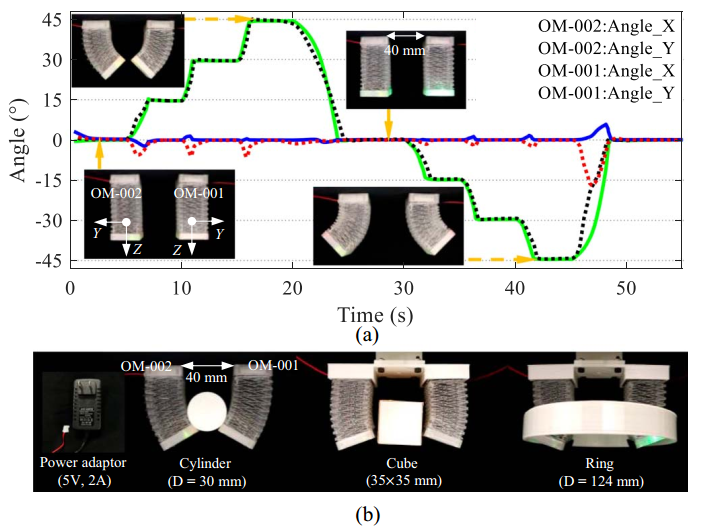
图9: 由两个模块构成的柔顺夹爪,可抓取圆柱体、方块和环形物体。
图9展示了模块重构成夹爪后的抓取能力,说明模块化不仅意味着可拼接,也意味着功能可迁移。
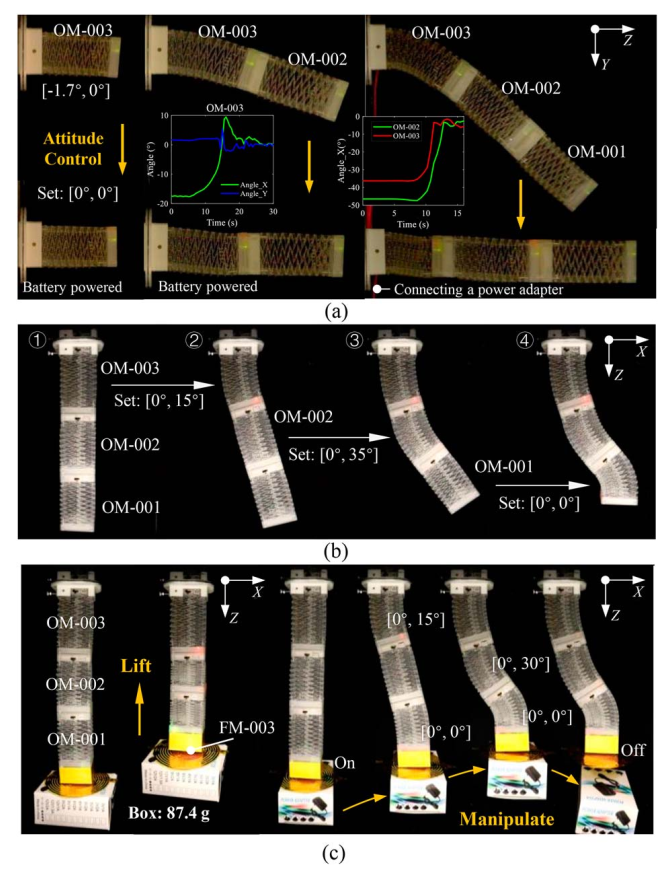
图10: 由三个模块构成的柔顺机械臂,可实现姿态调节、重力补偿和简单操作任务。
图10的这组结果把模块从抓取进一步推向了连续体式操作系统,也让论文的系统意义更完整。
03 创新点
✅ 单模块真正做到独立运行
论文设计的折纸模块并不是单一驱动段,而是集成了驱动、感知、控制、供电、通信和无线充电的独立单元。
✅ 用交叉耦合思路解决双轴姿态控制
面对四个 SMA 执行器与两个姿态角之间的耦合关系,作者提出的无模型交叉耦合控制器结构简单,但效果扎实。
✅ 折纸结构不只是轻,还带来了更好的刚柔平衡
相比常见软材料,PET 折纸主体在保持较大压缩和弯曲变形的同时,还具备更高刚度和抗扭能力,这对控制精度很关键。
✅ 论文真正把模块化价值做出来了
爬行、抓取、机械臂这三类演示不是简单堆砌,而是说明单模块能力足够强之后,重构才真正有意义。
04 总结与展望
这篇论文的价值,不只是做出了一个无线软体折纸模块,而是把一个更完整的逻辑跑通了:
先让单模块具备独立的感知、驱动和控制能力,再让模块之间通过快速拼接形成更复杂的机器人系统。这样一来,模块化就不再只是结构设计概念,而真正成为一种面向任务变化的系统构造方法。
当然,论文也没有回避它的局限。SMA 驱动的响应速度仍受热过程限制,多模块串联后还会受到重力和惯性影响,机械臂在动态稳定性方面也还有明显改进空间。作者在结尾提到,后续会继续做系统可扩展性、环境传感集成,以及多模块之间更自主的通信与协作。
未来研究将聚焦于以下几个方向:
其一,是继续提升模块系统的可扩展性,让更多模块协同工作。
其二,是进一步集成环境传感能力,不只感知自身姿态,还能感知外界变化。
其三,是探索多模块之间更自主的通信与协作,让这些模块不只是可拼接,而是真正能形成协同机器人系统。
如果要把模块化软体机器人真正推向复杂任务场景,会是驱动响应速度、多模块协同控制哪个更重要?欢迎在留言区聊聊你的判断。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)