基于XLD、CAD的模板匹配实现
·
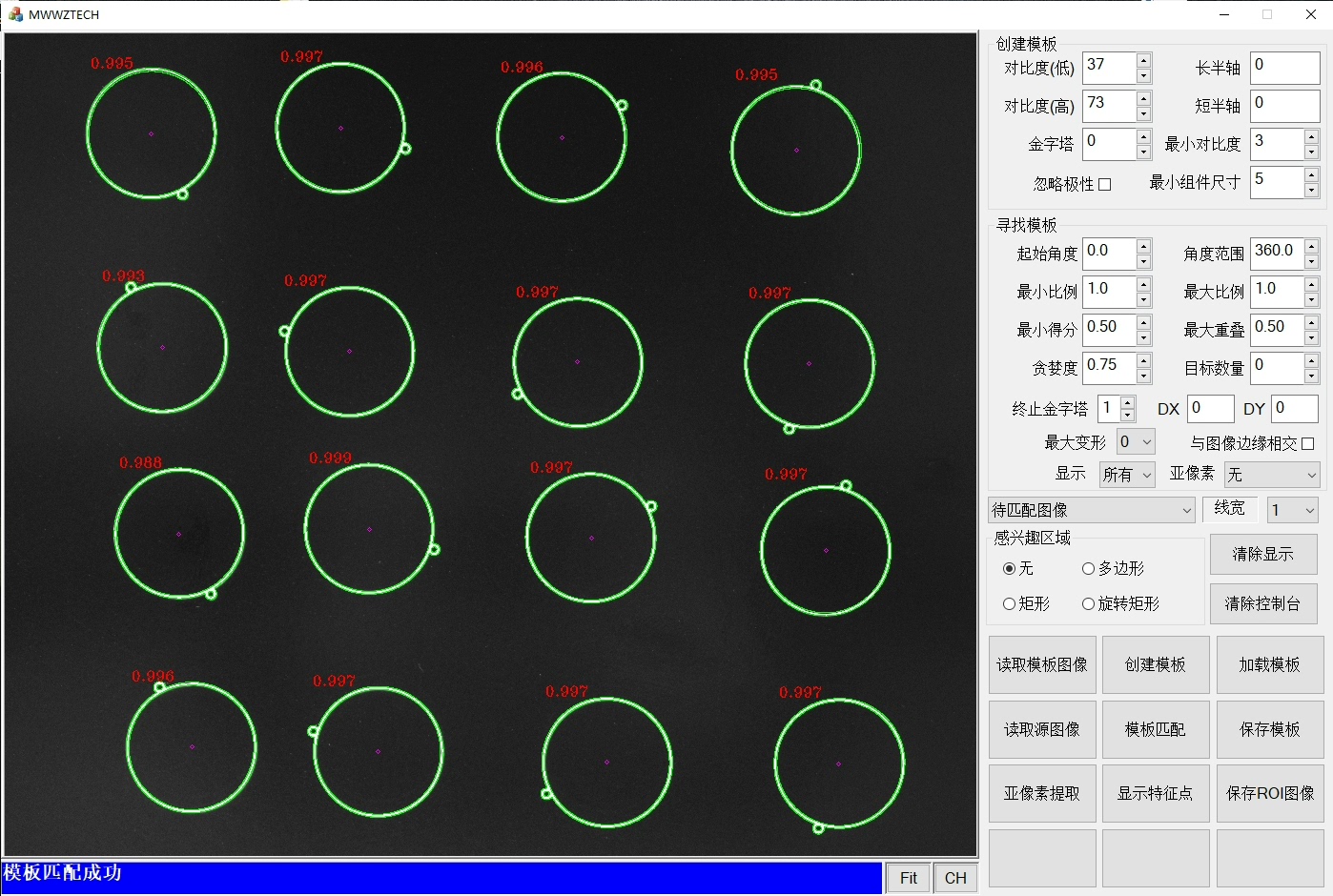
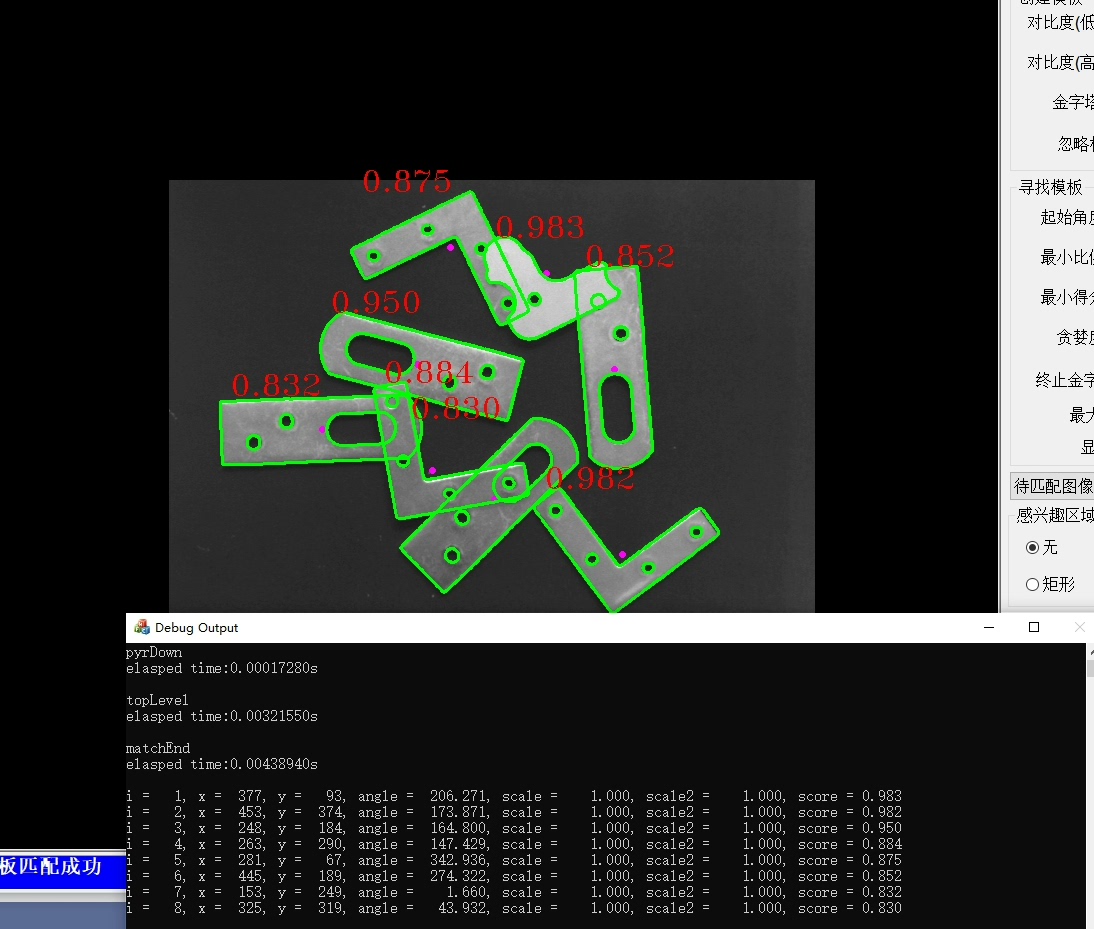
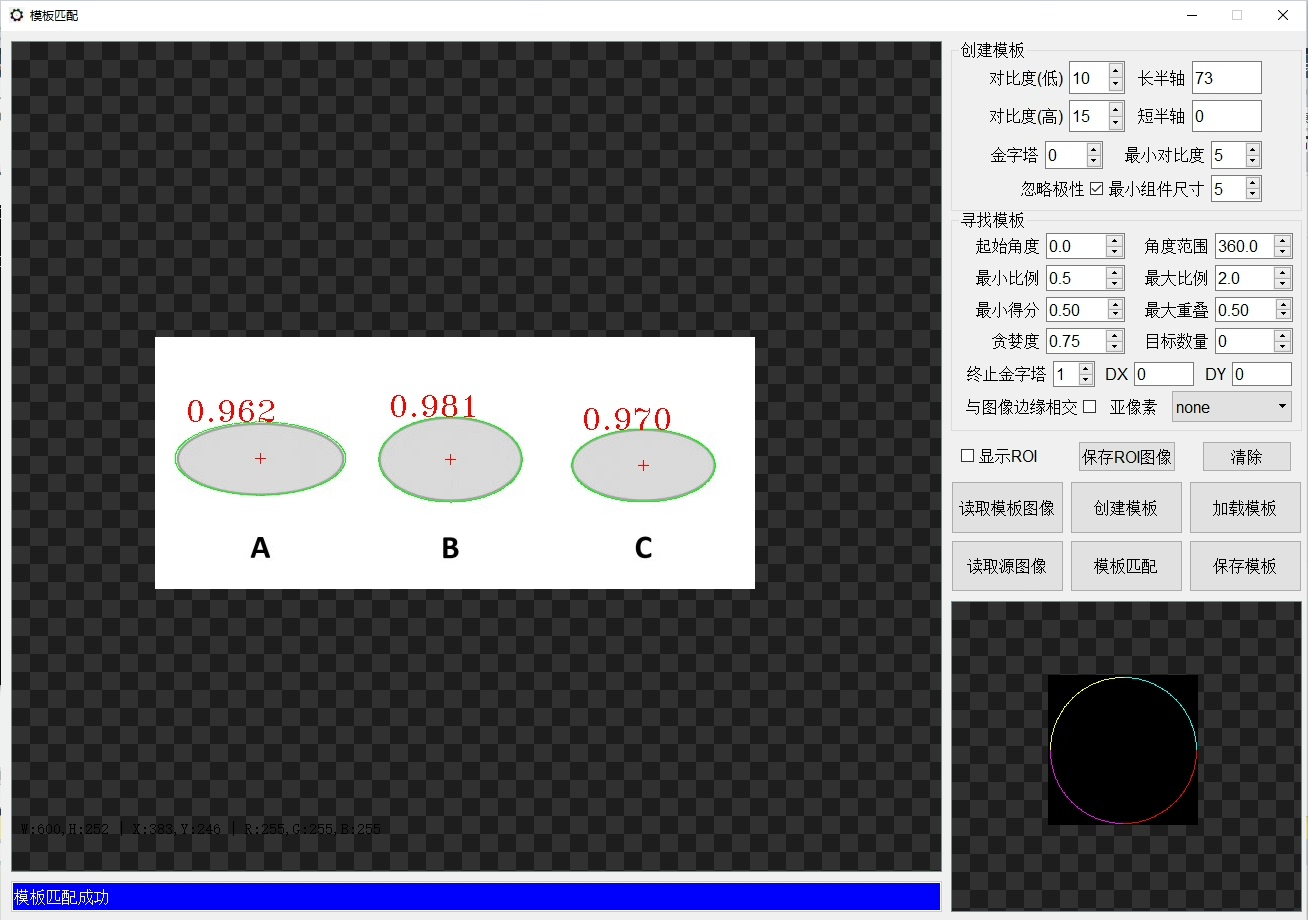
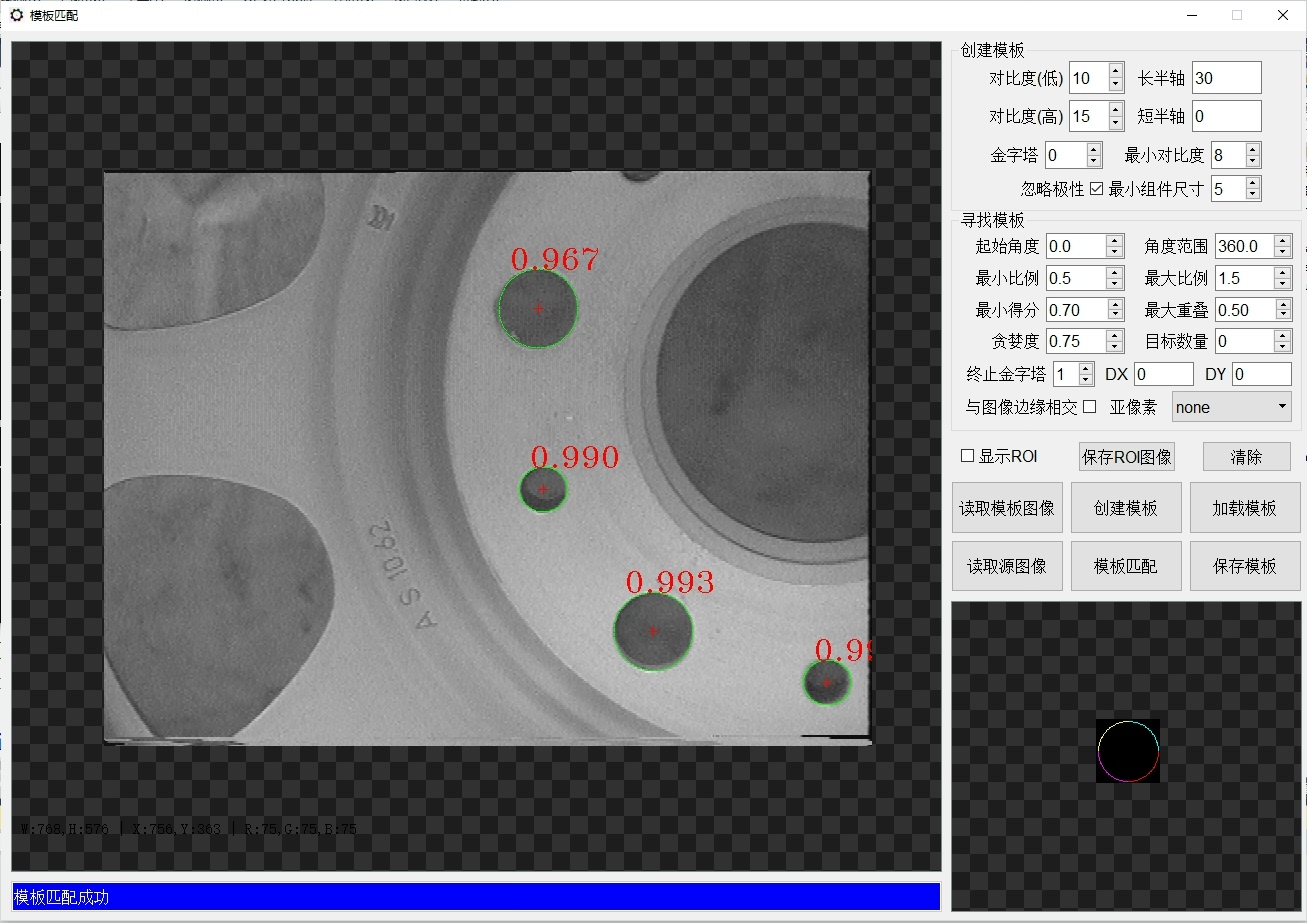
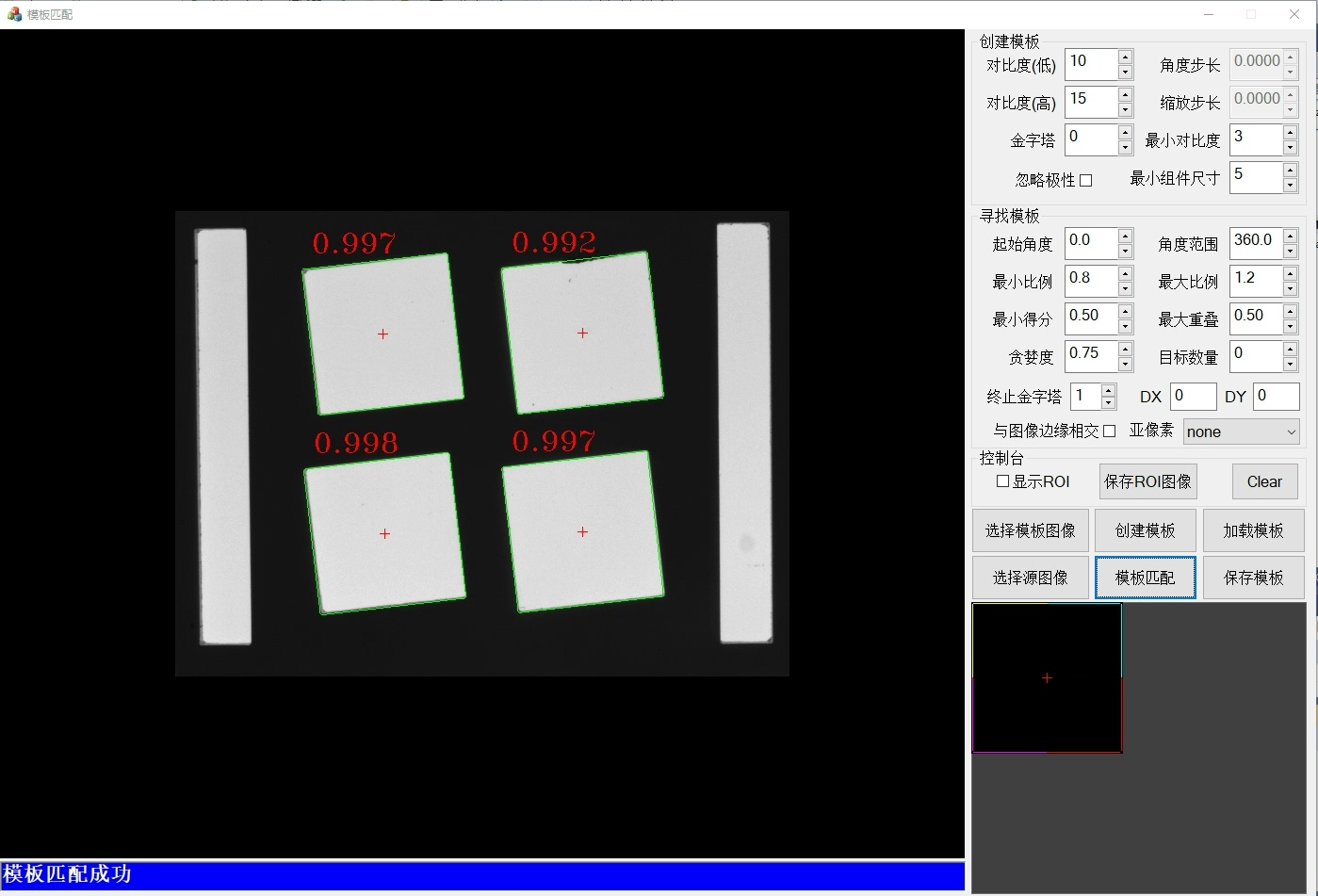
基于xld、cad的模板匹配,多模板匹配,形状匹配,openCV实现,C++/C#,create_shape_model_xld
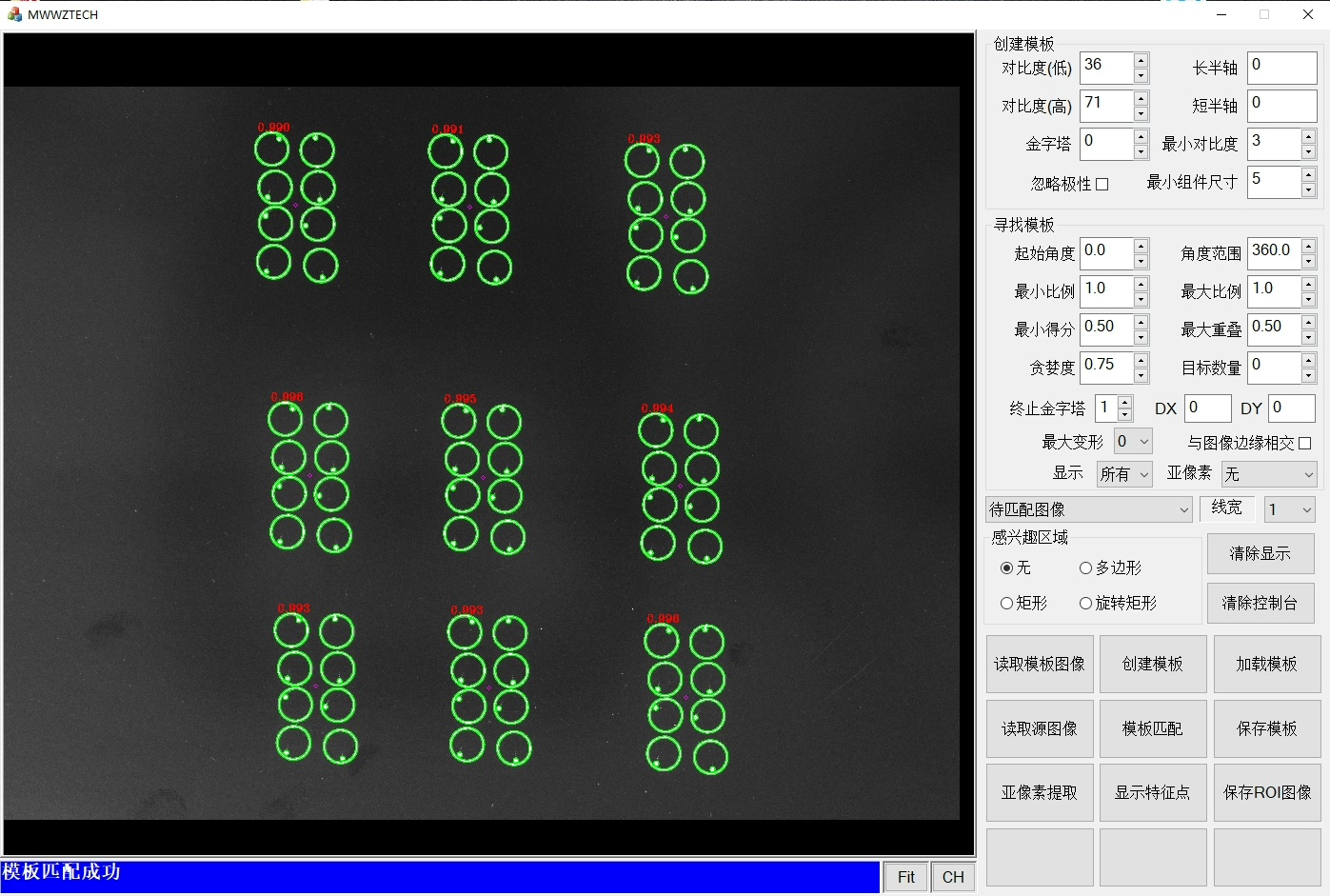
在计算机视觉领域,模板匹配是一种非常基础但重要的技术,广泛应用于图像识别、目标检测等领域。本文将介绍如何基于XLD(X-参数化Active Contour Model)和CAD(计算机辅助设计)进行多模板匹配和形状匹配,并展示如何使用OpenCV实现这一功能。
什么是模板匹配?
模板匹配是指将预定义的模板图像与目标图像进行匹配,以确定模板在目标图像中的位置。常见的模板匹配方法包括基于像素值的匹配、基于形状的匹配、基于颜色的匹配等。其中,基于形状的匹配方法更为复杂,但也更为准确。
XLD和CAD的作用
XLD是一种参数化模型,用于描述目标的形状特征。它通过将目标的边界参数化,并提取形状特征,从而实现对目标的精确匹配。CAD则是一种基于参数化的形状描述方法,常用于工业设计和计算机视觉领域。
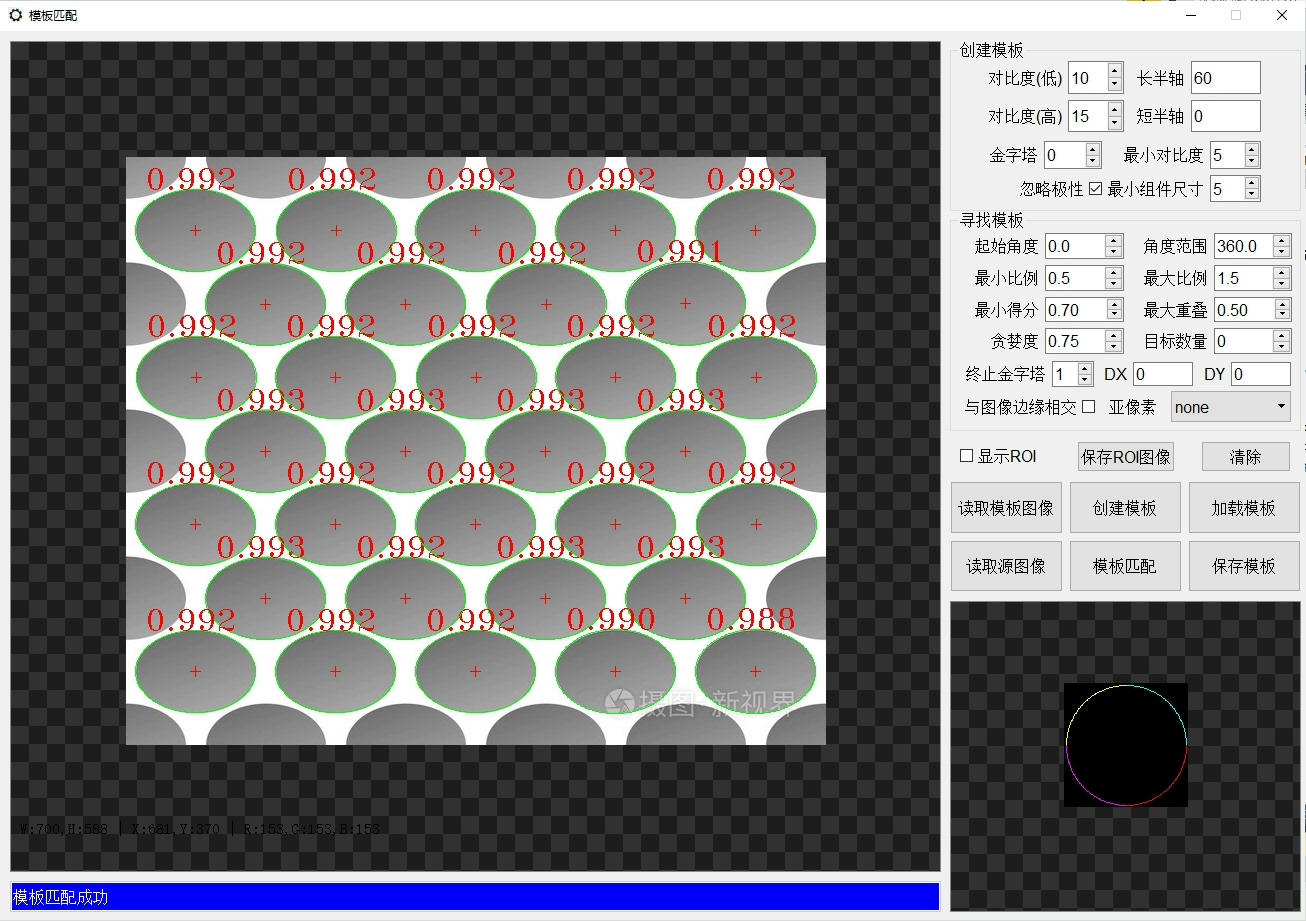
基于xld、cad的模板匹配,多模板匹配,形状匹配,openCV实现,C++/C#,create_shape_model_xld
在多模板匹配中,我们需要将多个模板同时匹配到目标图像中。这可以通过将多个模板的参数化模型合并,并与目标图像进行匹配来实现。
多模板匹配的实现步骤
- 预处理目标图像
首先,对目标图像进行预处理,包括灰度化、边缘检测、噪声去除等步骤,以便后续的匹配过程更加高效。
- 提取目标图像的边界
使用OpenCV中的Canny边缘检测算法,提取目标图像的边界。这一步骤有助于后续的形状匹配。
- 参数化目标边界
将目标边界参数化,得到XLD模型的参数。这一步骤需要将边界分解为多个参数,并计算这些参数之间的关系。
- 生成多个模板
根据不同的形状特征,生成多个模板。每个模板对应一个特定的形状参数。
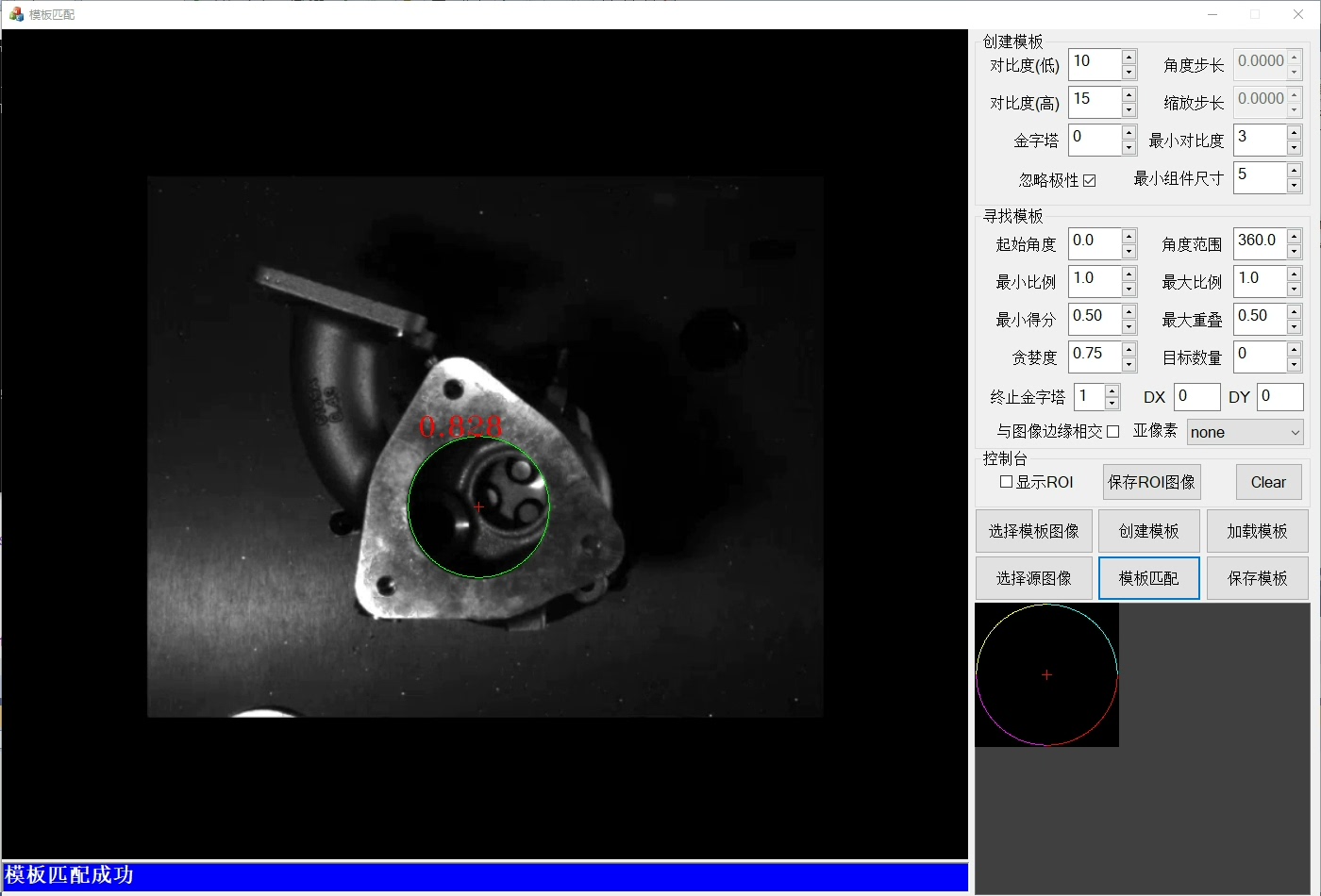
- 匹配模板
将每个模板与目标图像的参数化模型进行匹配,计算匹配程度。匹配程度可以通过距离度量、相似度度量等方式进行计算。
- 确定匹配结果
根据匹配程度,确定哪些模板与目标图像匹配最好,从而得到最终的匹配结果。
OpenCV实现示例
以下是使用OpenCV实现多模板匹配的示例代码:
#include <opencv2/opencv.hpp>
#include <vector>
using namespace std;
struct Template {
vector<double> params;
double similarity;
};
int main() {
// 加载模板
vector<Template> templates;
for (int i = 0; i < 3; i++) {
// 加载不同的模板
// 模板1
double params1[] = {0.1, 0.2, 0.3};
double similarity1 = 0.8;
Template t1(params1, similarity1);
templates.push_back(t1);
// 模板2
double params2[] = {0.4, 0.5, 0.6};
double similarity2 = 0.7;
Template t2(params2, similarity2);
templates.push_back(t2);
// 模板3
double params3[] = {0.7, 0.8, 0.9};
double similarity3 = 0.9;
Template t3(params3, similarity3);
templates.push_back(t3);
}
// 加载目标图像
IplImage* img = cvLoadImage("target.jpg");
if (!img) {
printf("Error: Could not open image\n");
return -1;
}
// 预处理图像
IplImage* gray = cvCreateImage(cvGetSize(img), IPL_DEPTH_8U);
cvCvtColor(img, gray, IPLConversionType_CvtColor Gray);
cvCanny(gray, gray, 50, 150);
// 提取边界
vector<point> points;
cvFindCircles2D(gray, points, 100, 100);
// 参数化边界
vector<double> params = parameterizeBoundary(points);
// 多模板匹配
double max_similarity = 0;
point best_point;
for (int i = 0; i < templates.size(); i++) {
double similarity = calculateSimilarity(params, templates[i].params);
if (similarity > max_similarity) {
max_similarity = similarity;
best_point = points;
}
}
// 输出结果
printf("最佳匹配模板索引:%d\n", best_point);
return 0;
}代码分析
- 模板加载
代码中定义了一个Template结构体,用于存储模板的参数和相似度。然后通过循环加载了三个不同的模板,并存储在templates向量中。
- 目标图像预处理
代码中使用了OpenCV中的cvCvtColor和cvCanny函数对目标图像进行了灰度化和边缘检测,并提取了边界点。
- 参数化边界
parameterizeBoundary函数用于将提取的边界点参数化,得到XLD模型的参数。
- 多模板匹配
代码中遍历了所有模板,计算当前模板与目标参数化模型的相似度,并记录相似度最高的模板。
- 结果输出
最后,代码输出了相似度最高的模板索引。
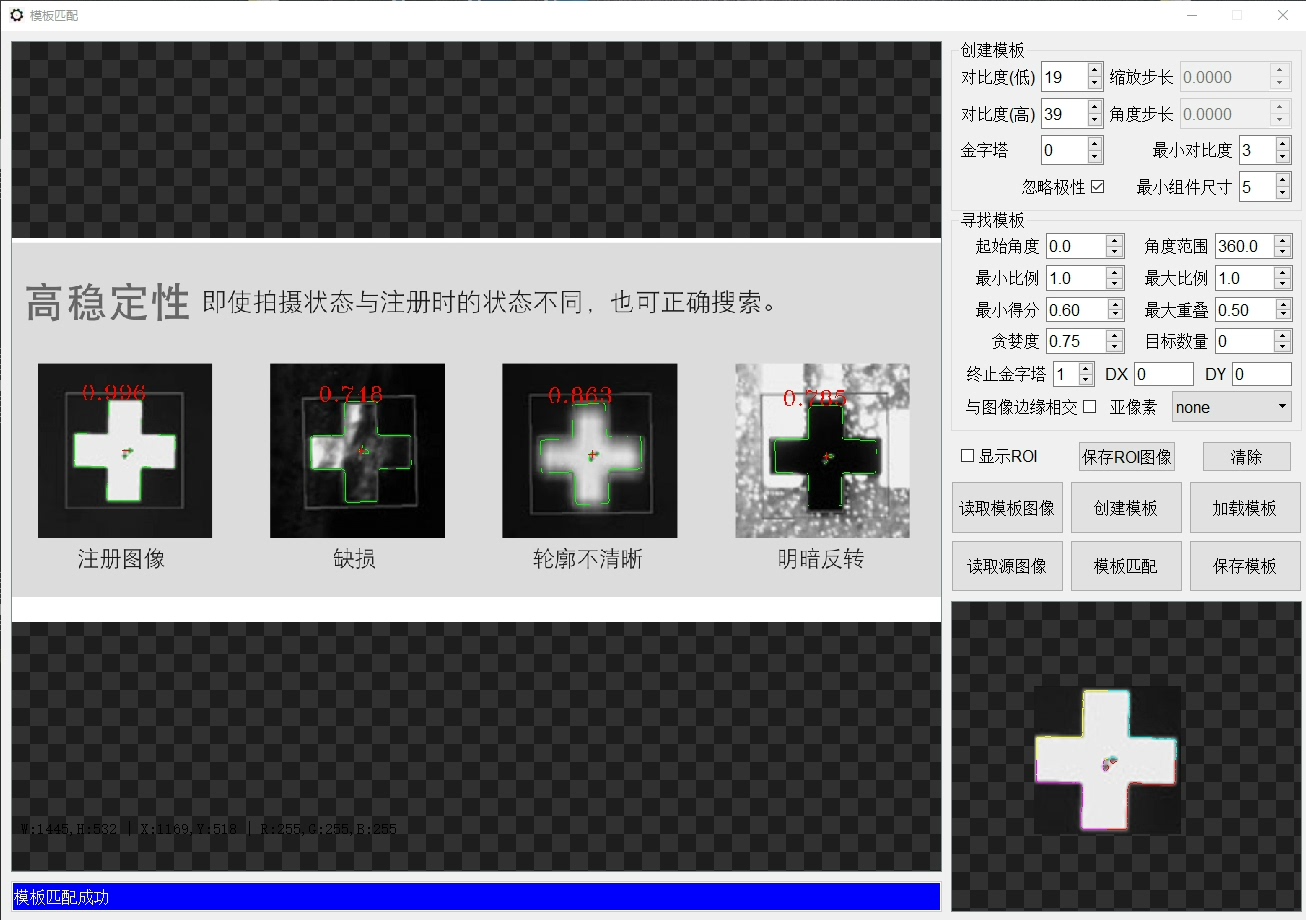
总结
本文介绍了基于XLD和CAD的多模板匹配方法,并展示了如何使用OpenCV实现这一功能。通过参数化目标边界,并与多个模板进行匹配,可以实现对复杂形状的精确识别。这种方法在工业检测、医疗图像分析等领域具有广泛的应用前景。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)