车道线检测:基于Matlab的有趣之旅
车道线检测matlab工程文件,gui界面,图像处理,图像分割,实时视频检测,霍夫变换,具体效果可看主页演示视频,程序包运行,欢迎打扰。。。最近在研究车道线检测相关的项目,今天就来和大家分享一下基于Matlab实现车道线检测的超酷工程文件,还带GUI界面哦,这一套搞下来,实时视频检测车道线不是梦!
车道线检测matlab工程文件,gui界面,图像处理,图像分割,实时视频检测,霍夫变换,具体效果可看主页演示视频,程序包运行,欢迎打扰。 。 。
最近在研究车道线检测相关的项目,今天就来和大家分享一下基于Matlab实现车道线检测的超酷工程文件,还带GUI界面哦,这一套搞下来,实时视频检测车道线不是梦!
图像处理与图像分割:车道线检测的基石
在这个车道线检测项目里,图像处理和图像分割可是重中之重。我们先来说说图像分割,它的目的就是把图像中我们感兴趣的部分(也就是车道线啦)从背景中分离出来。在Matlab里,实现起来不算太难。

比如下面这段简单代码(这里只是示意一个简单的灰度化操作,实际车道线检测的图像分割更复杂):
% 读取图像
image = imread('test_image.jpg');
% 转换为灰度图像
gray_image = rgb2gray(image);
imshow(gray_image);这里我们先读入一张彩色图像,然后利用Matlab自带的rgb2gray函数把它变成灰度图像。为啥要灰度化呢?因为彩色图像信息太多,后续处理起来复杂,灰度图像只有一个通道,处理起来更简单高效,而且对于车道线检测这种任务,灰度图像已经能提供足够的信息啦。
霍夫变换:神奇的线条检测工具
接下来就是霍夫变换闪亮登场了!霍夫变换在我们车道线检测里起着关键作用,它能帮我们从一堆离散的点中检测出直线。
车道线检测matlab工程文件,gui界面,图像处理,图像分割,实时视频检测,霍夫变换,具体效果可看主页演示视频,程序包运行,欢迎打扰。 。 。
看看简单的霍夫变换代码实现(同样是简单示意,实际应用会更复杂):
% 边缘检测
edges = edge(gray_image,'Canny');
% 霍夫变换检测直线
[H, theta, rho] = hough(edges);
% 寻找峰值
P = houghpeaks(H,5,'threshold',ceil(0.3*max(H(:))));
% 得到直线端点
lines = houghlines(edges, theta, rho, P,'FillGap',50,'MinLength',100);
% 绘制检测到的直线
figure, imshow(image), hold on
max_len = 0;
for k = 1:length(lines)
xy = [lines(k).point1; lines(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');
len = norm(lines(k).point1 - lines(k).point2);
if ( len > max_len)
max_len = len;
xy_long = xy;
end
end这段代码首先利用Canny边缘检测算法得到图像的边缘,这是因为霍夫变换通常在边缘图像上效果更好。然后进行霍夫变换得到霍夫空间H以及对应的角度theta和距离rho。接着通过houghpeaks函数在霍夫空间里寻找峰值,这些峰值就对应着图像中的直线。最后利用houghlines函数得到直线的端点,并把检测到的直线绘制在原图上。
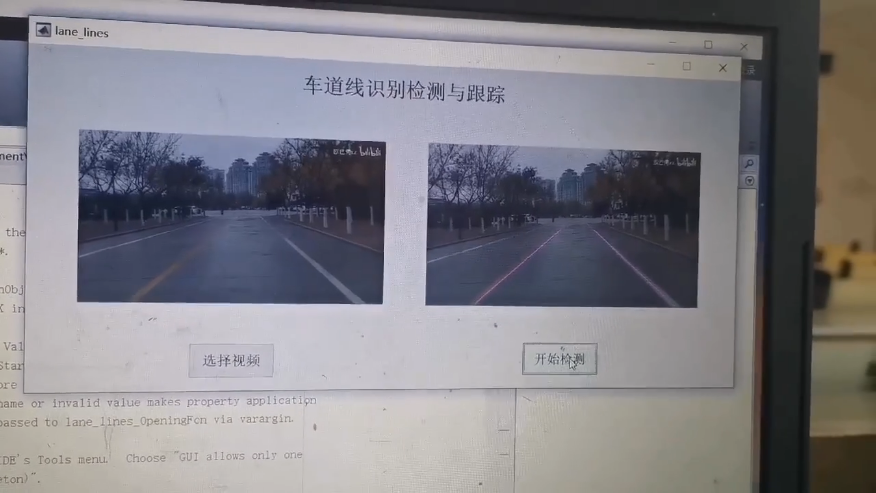
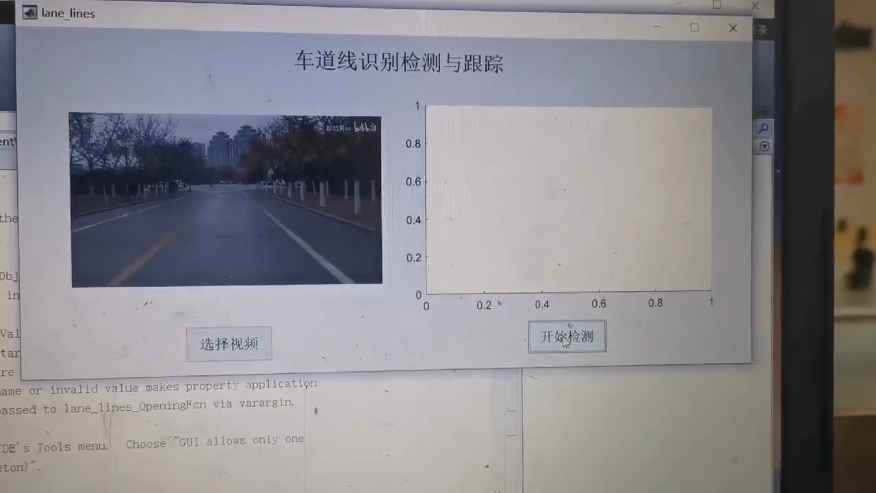
实时视频检测与GUI界面:让车道线检测看得见
实时视频检测也是这个工程文件的一大亮点。通过调用摄像头或者读取视频文件,结合前面提到的图像处理和霍夫变换算法,就能实时检测视频中的车道线。
% 打开摄像头
video = videoinput('winvideo', 1, 'RGB24_640x480');
start(video);
figure;
while(1)
% 获取一帧图像
frame = getsnapshot(video);
% 灰度化处理
gray_frame = rgb2gray(frame);
% 边缘检测
edges_frame = edge(gray_frame,'Canny');
% 霍夫变换检测直线
[H_frame, theta_frame, rho_frame] = hough(edges_frame);
P_frame = houghpeaks(H_frame,5,'threshold',ceil(0.3*max(H_frame(:))));
lines_frame = houghlines(edges_frame, theta_frame, rho_frame, P_frame,'FillGap',50,'MinLength',100);
% 绘制检测到的直线
imshow(frame), hold on
for k = 1:length(lines_frame)
xy = [lines_frame(k).point1; lines_frame(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');
end
drawnow;
end
stop(video);
delete(video);这段代码通过videoinput函数打开摄像头,然后不断获取摄像头的帧图像,对每一帧图像进行和前面类似的灰度化、边缘检测、霍夫变换等操作,最后把检测到的车道线实时绘制在帧图像上显示出来。
而GUI界面更是给这个项目增添了不少便利性和交互性。在Matlab的GUIDE工具里,我们可以轻松地设计出美观实用的界面,让用户可以选择打开摄像头、加载视频文件、调整一些检测参数等等。
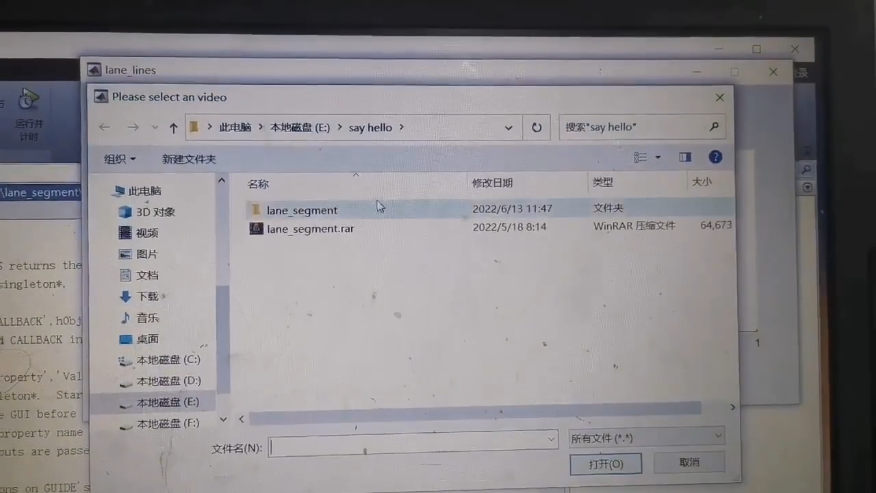
程序包运行:简单上手
这个车道线检测的程序包运行起来也不复杂。只要你安装好了Matlab环境,把工程文件解压到合适的目录,打开Matlab,进入工程文件所在目录,运行主程序文件,就能看到GUI界面弹出来啦。按照界面上的提示操作,就能轻松实现车道线的实时检测。
大家要是对这个车道线检测的Matlab工程文件感兴趣,具体效果可以看我主页的演示视频哦。要是在运行过程中有啥问题,或者想交流相关技术,欢迎随时打扰!咱们一起在车道线检测的技术海洋里畅游。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)