车道线检测小结
一、介绍
这里考虑通过相机传感器即计算机视觉来进行检测。
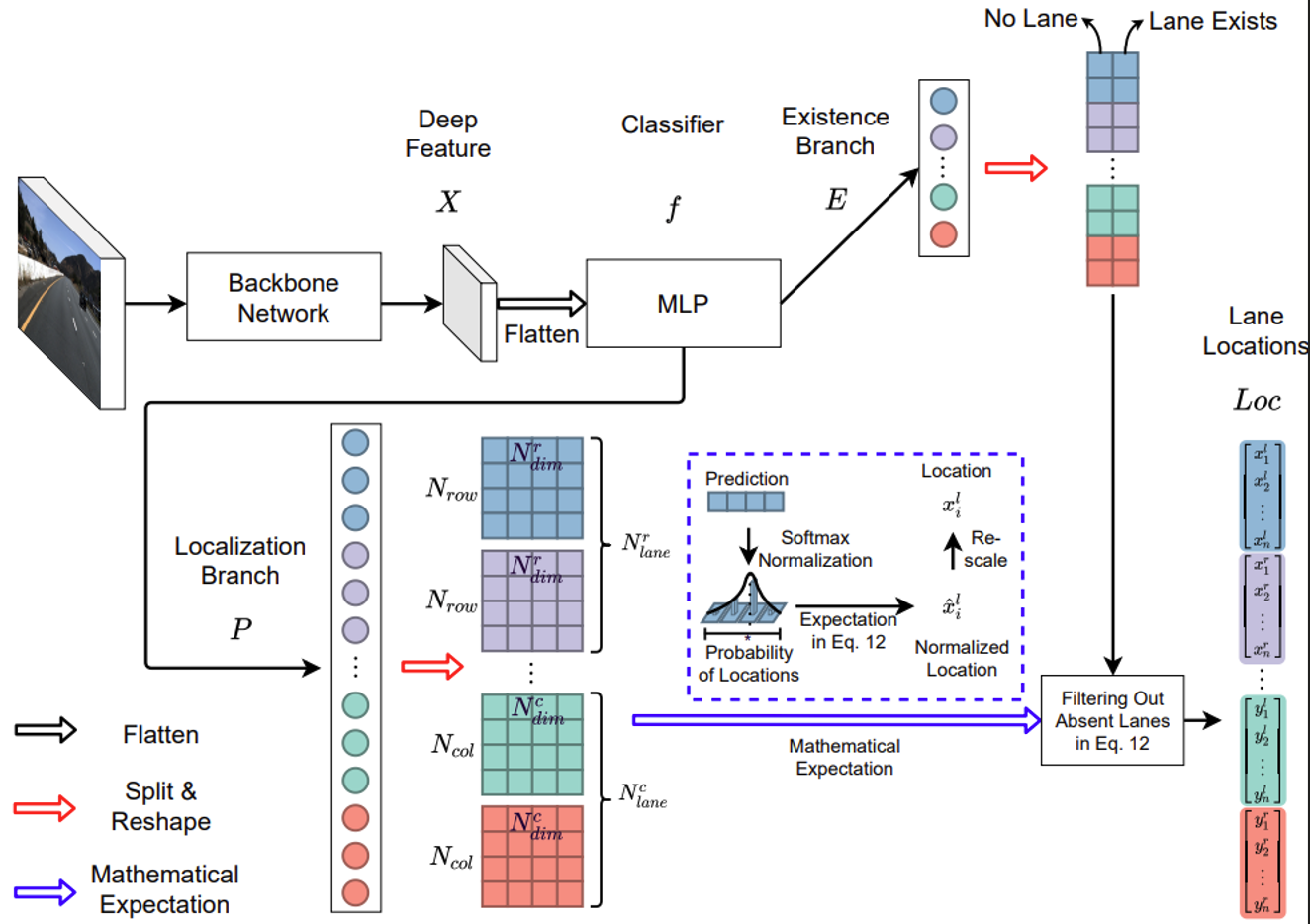
(摘自Ultra-Fast-Lane-Detection-v2的网络架构示意图)
检测过程中难点问题:
(1)光照变化:日照强度的变化、阴影、反光等都可能导致车道线难以检测。例如,在太阳直射或低日照条件下,车道线的可见性会大大降低。
(2)道路材料和颜色的多样性:不同的道路可能使用不同的材料或颜色来标记车道线,这增加了检测的复杂性。
(3)遮挡问题:其他车辆、行人或其他物体可能会遮挡车道线,特别是在交通繁忙的路段。
道路磨损和老化:随着时间的推移,**车道线可能会因磨损、污渍或其他因素而变得模糊或不清晰。
(4)复杂的道路几何形状:例如,弯道、交叉口和分叉路口可能导致车道线形状的快速变化。
(5)道路条件变化:雨、雪或冰可能会改变车道线的外观或完全遮盖车道线。
(6)近似并行的非车道线:如路边的缝隙、道路维修标记或其他临时标记可能被误识别为车道线。
(7)视角和相机校准:摄像机的位置、角度或校准可能会影响到车道线的检测。
(8)实时性要求:在自动驾驶或驾驶辅助系统中,车道线检测需要实时进行,这对算法的效率提出了挑战。
(8)多车道和交叉车道的处理:在多车道道路或交叉口,车道线的数量、方向和模式变得更加复杂。
(9)与其他道路标记的区分:需要将车道线与其他道路标记(如行人横道、停车区域等)区分开。
参考:车道线检测综述(难点/数据集/主要方案/后处理)-CSDN博客![]() https://blog.csdn.net/CV_Autobot/article/details/133224432
https://blog.csdn.net/CV_Autobot/article/details/133224432
(29 封私信 / 80 条消息) 2D车道线检测方法总结 - 知乎![]() https://zhuanlan.zhihu.com/p/658137874
https://zhuanlan.zhihu.com/p/658137874
二、传统方法
传统算法基于手工设计调节的特征(如边缘检测、霍夫变换、RANSAC等),在结构化道路(如高速公路)上表现尚可,但在光照变化、遮挡、弯曲道路等复杂场景下鲁棒性较差。其优势在于计算开销低、不依赖大规模标注数据。
(应用场景受限)
【快车道线检测项目】项目学习总结 - 逍遥划水真君 - 博客园![]() https://www.cnblogs.com/zkChange/p/18731542
https://www.cnblogs.com/zkChange/p/18731542
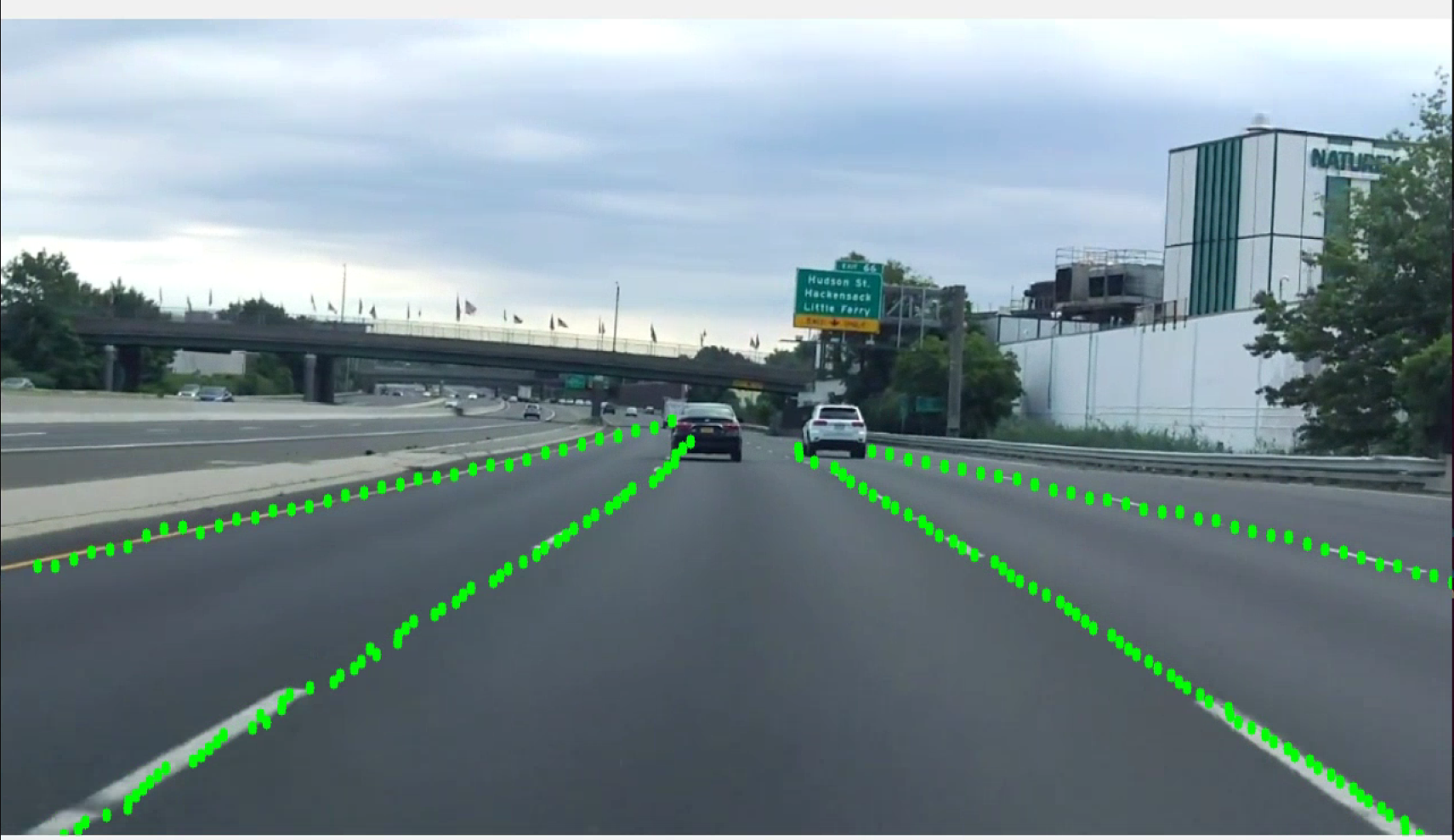
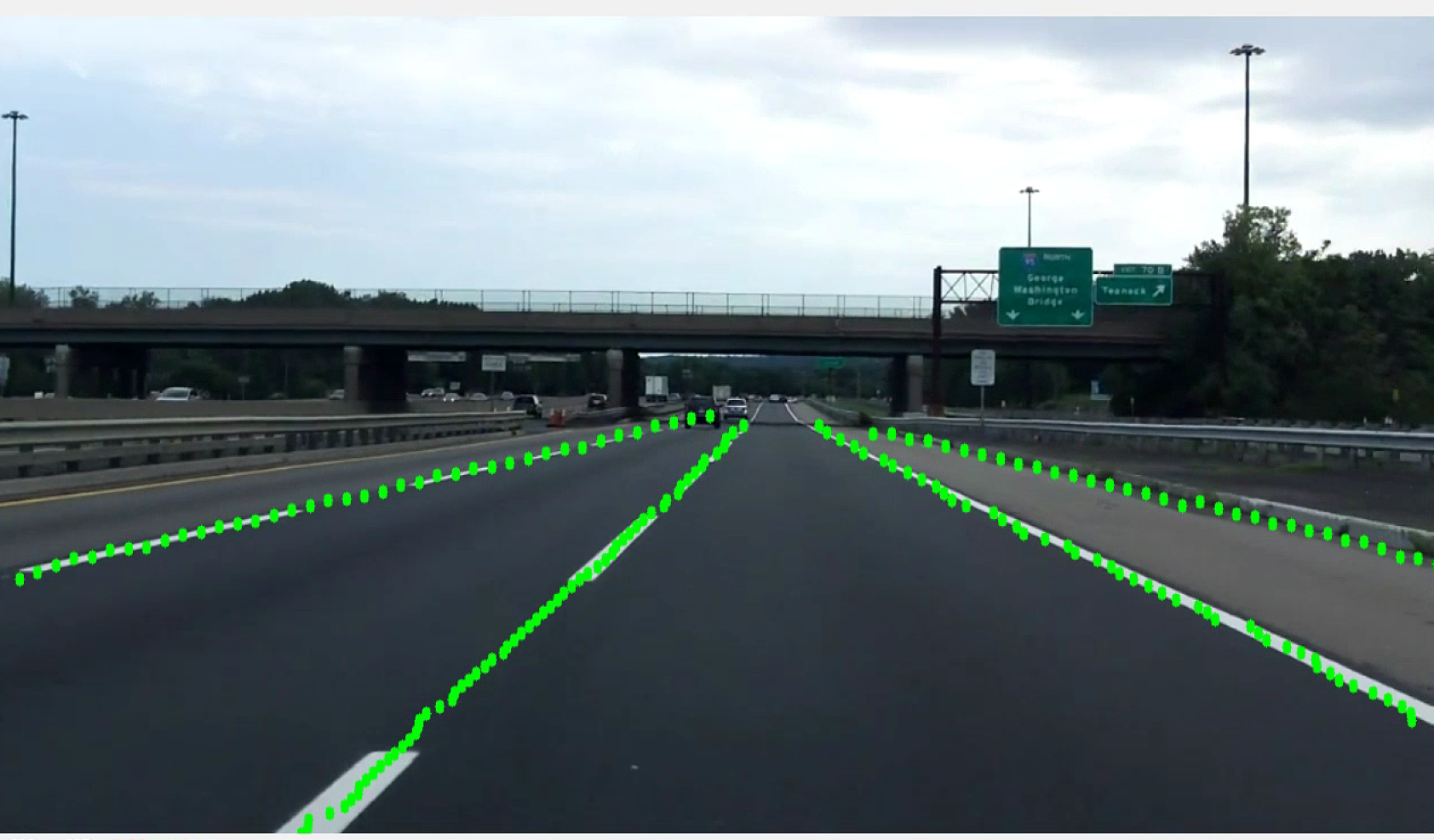
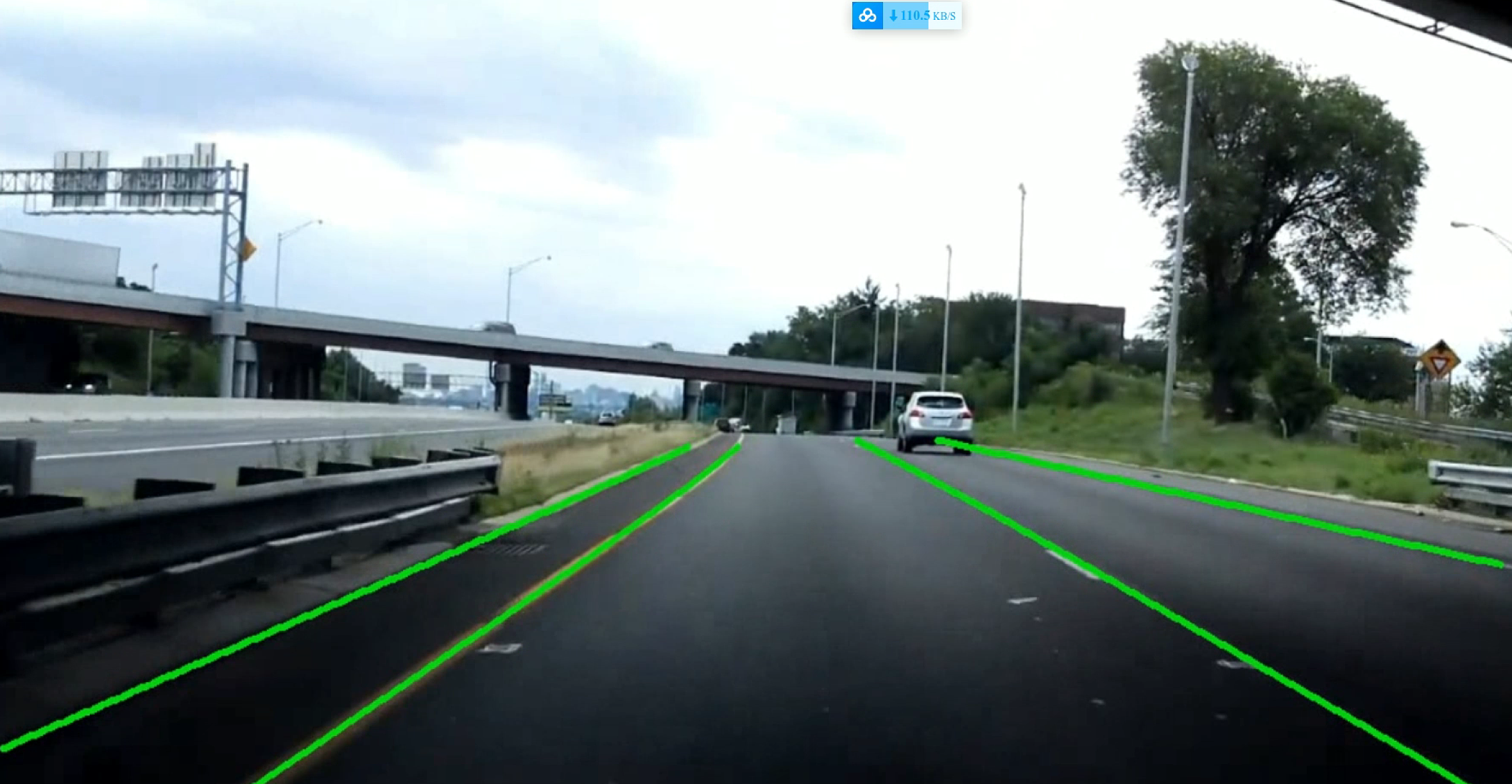
检测效果:
==》实现步骤
(1)颜色筛选
(2)边缘检测
(3)检测区域筛选
(4)霍夫变化获取车道线位置进行绘制
三、深度学习
深度学习车道线检测方法可分为基于分割、基于检测、基于关键点、基于曲线四类。
(1)Ultra-Fast-Lane-Detection
参考:https://github.com/cfzd/Ultra-Fast-Lane-Detection![]() https://github.com/cfzd/Ultra-Fast-Lane-Detection
https://github.com/cfzd/Ultra-Fast-Lane-Detection
(29 封私信 / 80 条消息) (五十九)通俗易懂理解——UFLD超快车道线检测原理 - 知乎![]() https://zhuanlan.zhihu.com/p/608421808
https://zhuanlan.zhihu.com/p/608421808
UFLD(Ultra-Fast-Lane-Detection)将车道线检测建模为 “基于行方向的分类” 问题,而非传统的像素级分割。它将图像划分为多个行(row),模型只需预测每一行中车道线最可能出现的列位置。
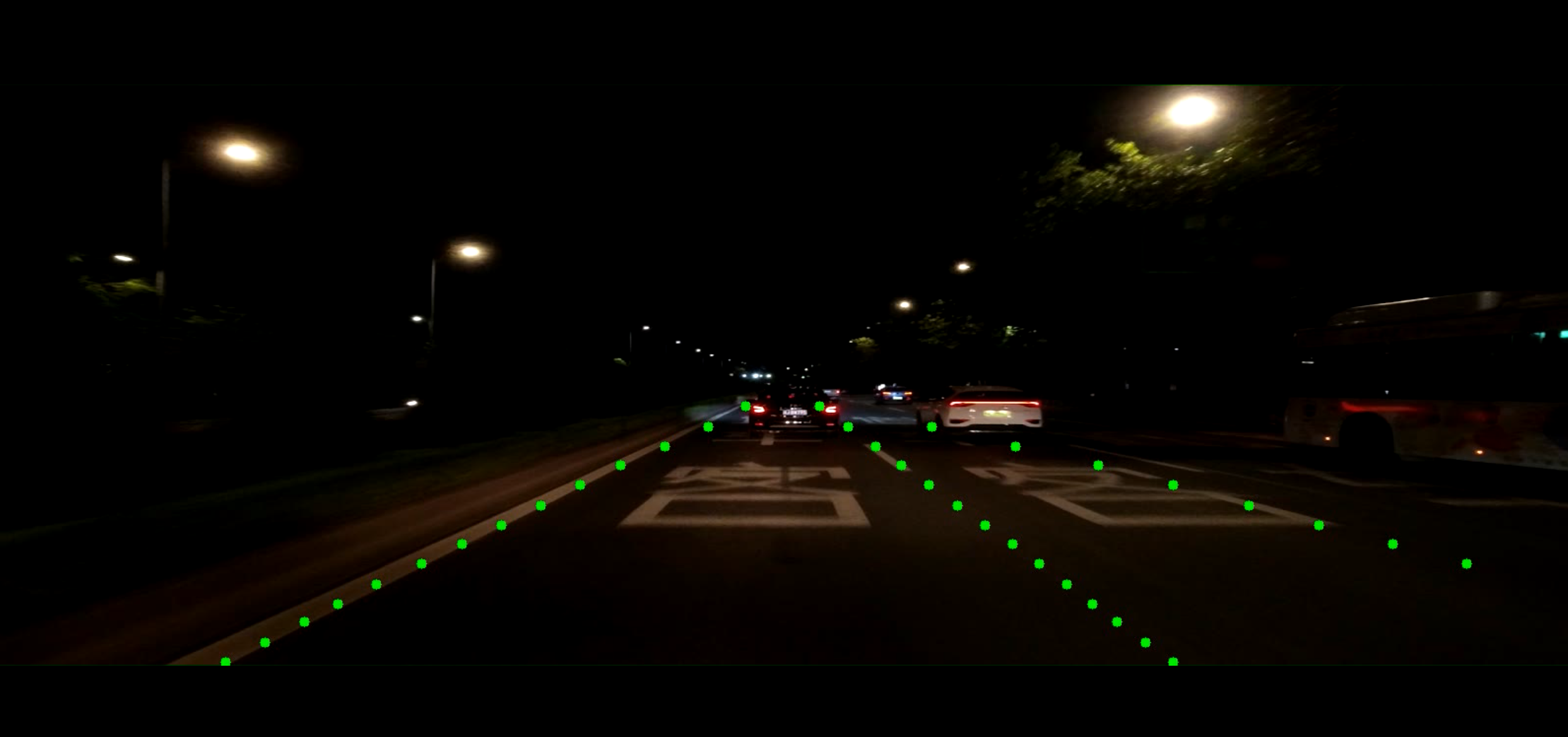
检测效果: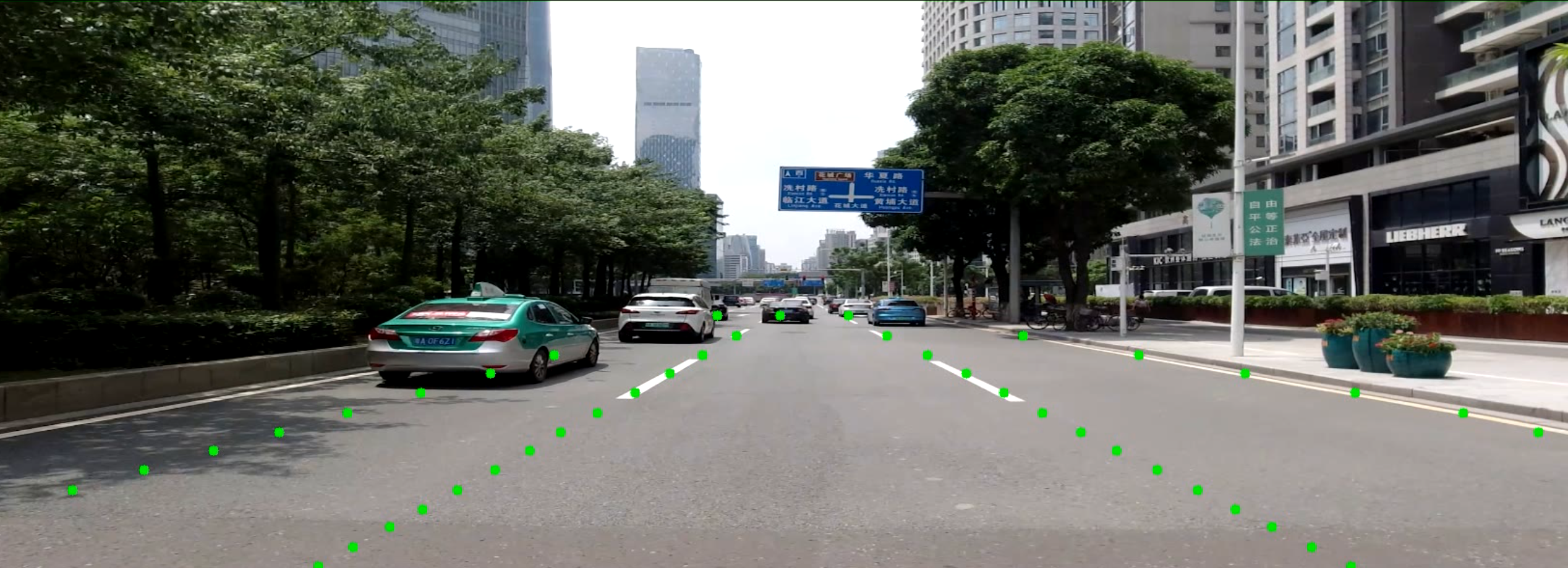
(2)Ultra-Fast-Lane-Detection-v2
Ultra-Fast-Lane-Detection-v2:Ultra Fast Deep Lane Detection With Hybrid Anchor Driven Ordinal Classification (TPAMI 2022) - AtomGit | GitCode![]() https://gitcode.com/gh_mirrors/ul/Ultra-Fast-Lane-Detection-v2/?utm_source=gitcode_aigc_v1_t1&index=bottom&type=card&&uuid_tt_dd=10_30855585570-1765685666449-329195&isLogin=1&from_id=141374188&from_link=70208530a298d6729afaed12c4ad5eff#%E5%8F%AF%E8%A7%86%E5%8C%962206.07389
https://gitcode.com/gh_mirrors/ul/Ultra-Fast-Lane-Detection-v2/?utm_source=gitcode_aigc_v1_t1&index=bottom&type=card&&uuid_tt_dd=10_30855585570-1765685666449-329195&isLogin=1&from_id=141374188&from_link=70208530a298d6729afaed12c4ad5eff#%E5%8F%AF%E8%A7%86%E5%8C%962206.07389![]() https://arxiv.org/pdf/2206.07389
https://arxiv.org/pdf/2206.07389
UFLD方法虽然在直道和当前车道表现优异,但在弯道和侧车道上,定位误差会被放大。V2的解决方案是引入混合锚点(Hybrid Anchor) 系统,也就是用行锚(Row Anchor)和列锚(Column Anchor)共同来表示车道线。
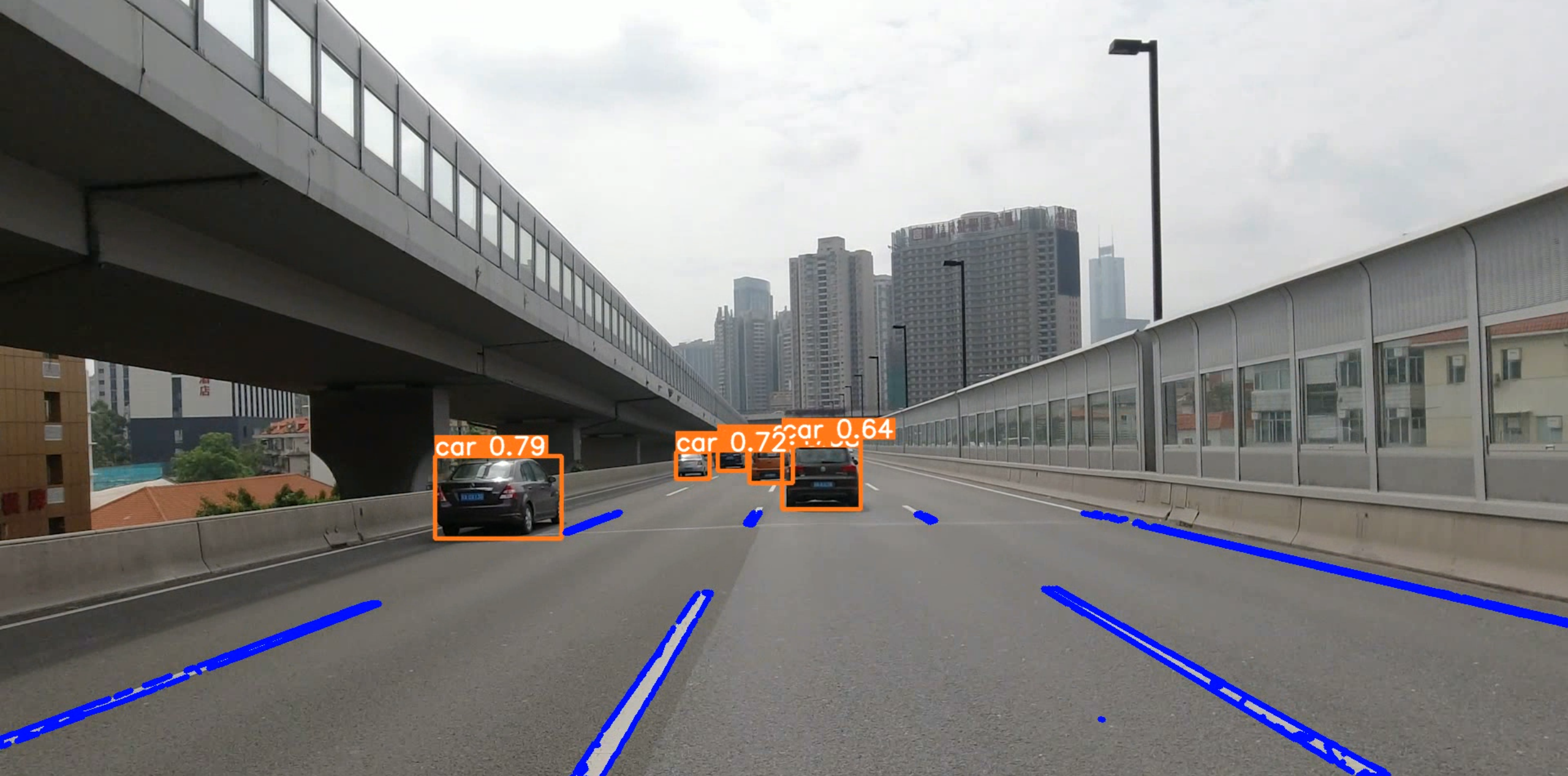
检测效果:

(3)YOLOP(You Only 👀 Once for Panoptic 🚗 Perception)
参考:基于yolov5的车道线检测及安卓部署_车道线检测yolov5代码-CSDN博客
GitHub - hustvl/YOLOP:全景驾驶感知只需查找一次。(MIR2022) ·GitHub![]() https://github.com/hustvl/YOLOP
https://github.com/hustvl/YOLOP
通过多任务学习,构建神经网络,在模型中端到端地完成三项任务:识别车辆行人、识别可通行区域、识别分割车道线。
检测效果:

(4) CondLaneNet
参考:(30 封私信 / 80 条消息) CondLaneNet|使用动态卷积核预测每个车道线实例 - 知乎![]() https://zhuanlan.zhihu.com/p/393167538
https://zhuanlan.zhihu.com/p/393167538
检测效果:

(4) CLRNet
参考:https://github.com/Turoad/CLRNet![]() https://github.com/Turoad/CLRNet
https://github.com/Turoad/CLRNet
通过结合图像的高层语义和低层细节来提升车道线检测的准确性
待续
(5) CLRerNet
参考:CLRerNet推理详解及部署实现(上)-CSDN博客![]() https://blog.csdn.net/qq_40672115/article/details/141275384?ops_request_misc=elastic_search_misc&request_id=c0f4f316b98f4f12f893d3e022d89a0b&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~baidu_landing_v2~default-4-141275384-null-null.142^v102^pc_search_result_base2&utm_term=%20CLRerNet&spm=1018.2226.3001.4187CLRerNet推理详解及部署实现(下)-CSDN博客
https://blog.csdn.net/qq_40672115/article/details/141275384?ops_request_misc=elastic_search_misc&request_id=c0f4f316b98f4f12f893d3e022d89a0b&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~baidu_landing_v2~default-4-141275384-null-null.142^v102^pc_search_result_base2&utm_term=%20CLRerNet&spm=1018.2226.3001.4187CLRerNet推理详解及部署实现(下)-CSDN博客![]() https://blog.csdn.net/qq_40672115/article/details/141275949?ops_request_misc=&request_id=&biz_id=102&utm_term=%20CLRerNet&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-6-141275949.142^v102^pc_search_result_base2&spm=1018.2226.3001.4187https://github.com/hirotomusiker/CLRerNet
https://blog.csdn.net/qq_40672115/article/details/141275949?ops_request_misc=&request_id=&biz_id=102&utm_term=%20CLRerNet&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-6-141275949.142^v102^pc_search_result_base2&spm=1018.2226.3001.4187https://github.com/hirotomusiker/CLRerNet![]() https://github.com/hirotomusiker/CLRerNet
https://github.com/hirotomusiker/CLRerNet
CLRerNet 是在 CLRNet 基础上的一项重要改进。
提出一个跨层优化的车道线检测网络CLRNet,用高层次特征检出车道线,用低层次特征调节车道线位置。
提出ROIGather模块,收集全局上下文信息,增强车道线的特征表示。
提出Line IoU loss,提高车道线的回归准确性。
检测效果:


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)