用MATLAB复现Autoware中的路径规划算法:基于障碍物几何边界的方法
简单来说,这个方法就是通过分析障碍物的几何形状和位置,确定车辆可以行驶的区域,然后在这些区域内规划一条安全、可行的路径。这类算法的核心在于如何提取障碍物的边界,并在此基础上生成路径。这次复现的过程让我对路径规划有了更深的理解,尤其是在如何处理障碍物和规划路径之间平衡的问题。MATLAB在这个过程中提供了很大的便利,简洁的语法和强大的绘图功能让我能够快速试验和调整算法。如果你对自动驾驶或路径规划感兴
matlab复现autoware中基于障碍物几何边界的路径规划算法
最近在学习自动驾驶相关的技术,发现Autoware这个开源项目真是一个宝藏,里面封装了很多算法,尤其是路径规划这块。不过,作为一个刚接触这个领域的新手,光看代码有时候挺吃力的,于是我就想着能不能用MATLAB把这个算法的核心部分复现一下,方便自己理解。
1. 什么是基于障碍物几何边界的路径规划?
简单来说,这个方法就是通过分析障碍物的几何形状和位置,确定车辆可以行驶的区域,然后在这些区域内规划一条安全、可行的路径。这类算法的核心在于如何提取障碍物的边界,并在此基础上生成路径。
2. 复现的核心思路
整个复现过程分成几个主要步骤:
- 数据预处理:读取障碍物的位置和几何信息。
- 障碍物边界提取:将障碍物的几何形状转化为数学表达式。
- 路径生成:基于提取的边界,使用某种优化算法生成路径。
下面我就详细谈谈每一步怎么用MATLAB实现。
3. 数据预处理
首先,需要读取障碍物的位置数据。假设我们有障碍物的位置坐标,存储在一个矩阵obstacles中,每一行表示一个障碍物的中心坐标,比如obstacles = [x1, y1; x2, y2; ...]。
假设障碍物都是圆形状的,半径都是r,那么障碍物在平面上的覆盖区域就可以表示为一系列的圆。
% 障碍物中心坐标
obstacles = [1, 1; 2, 3; 4, 2];
r = 1; % 半径这样,我们就有了障碍物的基本信息。
4. 障碍物边界提取
接下来,我们需要将障碍物的几何形状转化为路径规划时需要避开的区域。比如,对于每个障碍物,我们可以将其视为一个圆,然后在路径规划中避免进入半径为r的范围内。
不过,在实际中,障碍物可能不仅仅是圆形,还有可能是多边形。为了简化问题,假设我们暂时只处理圆形障碍物。
那么,障碍物的边界可以用以下不等式表示:
$$
(x - xi)^2 + (y - yi)^2 \geq r^2
$$
matlab复现autoware中基于障碍物几何边界的路径规划算法
其中,$(xi, yi)$是障碍物的中心坐标,$r$是半径。
在MATLAB中,我们可以用网格法来表示整个空间,并标出哪些区域是障碍物区域。
% 定义环境网格
x = linspace(-5, 5, 100);
y = linspace(-5, 5, 100);
[X, Y] = meshgrid(x, y);
is_obstacle = zeros(size(X));
% 遍历所有障碍物,标记障碍物区域
for i = 1:size(obstacles, 1)
xi = obstacles(i, 1);
yi = obstacles(i, 2);
idx = (X - xi).^2 + (Y - yi).^2 < r^2;
is_obstacle = is_obstacle | idx;
end
% 绘制障碍物
figure;
contourf(x, y, is_obstacle, [0.5, 0.5], 'FaceColor', 'r');
title('障碍物区域');这一步的作用是把障碍物在平面上的位置标记出来,方便后续规划路径时避开这些区域。
5. 路径生成
路径生成部分是整个算法的核心。这里我们需要找到一条从起点到终点的路径,同时避开所有的障碍物。
一种常用的方法是基于采样的路径规划算法,比如RRT(Rapidly-exploring Random Tree)。不过,为了简化问题,我们可以尝试用遗传算法或者简单的优化方法来生成路径。
这里我选择用遗传算法来优化路径,因为它的实现相对直观。
遗传算法的步骤
- 初始化种群:随机生成一批路径。
- 适应度评估:评估每条路径是否满足避开障碍物的条件。
- 选择、交叉、变异:生成下一代种群。
- 重复迭代:直到满足终止条件。
在MATLAB中,可以用ga函数来实现遗传算法,不过这里为了方便,我们可以自己手动实现。
% 定义路径规划参数
start_pos = [0, 0]; % 起点
end_pos = [5, 5]; % 终点
num_segments = 20; % 路径分割段数
num_ind = 100; % 种群大小
num_iter = 50; % 迭代次数
% 初始化种群:每个个体是一个由num_segments个点组成的路径
population = zeros(num_ind, num_segments*2); % 每行存储x和y坐标
for i = 1:num_ind
% 随机生成从起点到终点的路径
path = [start_pos; end_pos];
for j = 1:num_segments-1
xRand = start_pos(1) + rand*(end_pos(1)-start_pos(1));
yRand = start_pos(2) + rand*(end_pos(2)-start_pos(2));
path = [path; xRand, yRand];
end
population(i, :) = reshape(path(2:end,:), 1, 2*num_segments);
end
% 迭代优化
for iter = 1:num_iter
% 计算适应度
fitness = zeros(num_ind, 1);
for i = 1:num_ind
% 将路径展开
path = reshape(population(i, :), num_segments, 2);
% 检查路径是否与障碍物相交
valid = true;
for j = 1:num_segments
x = path(j, 1);
y = path(j, 2);
% 检查是否与障碍物相交
[idx, ~] = min((x - obstacles(:, 1)).^2 + (y - obstacles(:, 2)).^2);
if sqrt(idx) < r
valid = false;
break;
end
end
if valid
fitness(i) = 1 / (norm(end_pos - path(end, :)) + 1); % 适应度函数
else
fitness(i) = 0;
end
end
% 选择、交叉、变异
[sorted_fitness, idx] = sort(fitness, 'descend');
parents = population(idx(1:50), :); % 选择前50%的个体
% 交叉
for i = 1:50
p1 = parents(i, :);
p2 = parents(end - i + 1, :);
c1 = p1 * 0.5 + p2 * 0.5; % 简单交叉
c2 = p1 * 0.5 + p2 * 0.5;
population(50 + i, :) = c1;
population(100 + i, :) = c2;
end
% 变异
mutation_rate = 0.1;
for i = 1:num_ind
if rand < mutation_rate
population(i, :) = population(i, :) + 0.1*randn(1, 2*num_segments);
end
end
end
% 找到最优路径
[~, best_idx] = max(fitness);
best_path = reshape(population(best_idx, :), num_segments, 2);
% 绘制结果
figure;
hold on;
plot(best_path(:, 1), best_path(:, 2), 'b-', 'LineWidth', 2);
plot(obstacles(:, 1), obstacles(:, 2), 'ro', 'MarkerSize', 10);
plot(start_pos(1), start_pos(2), 'g*', 'MarkerSize', 15);
plot(end_pos(1), end_pos(2), 'g*', 'MarkerSize', 15);
title('规划路径');这段代码的核心是通过遗传算法不断优化路径,直到找到一条既避开所有障碍物又能到达终点的路径。
6. 结果与分析
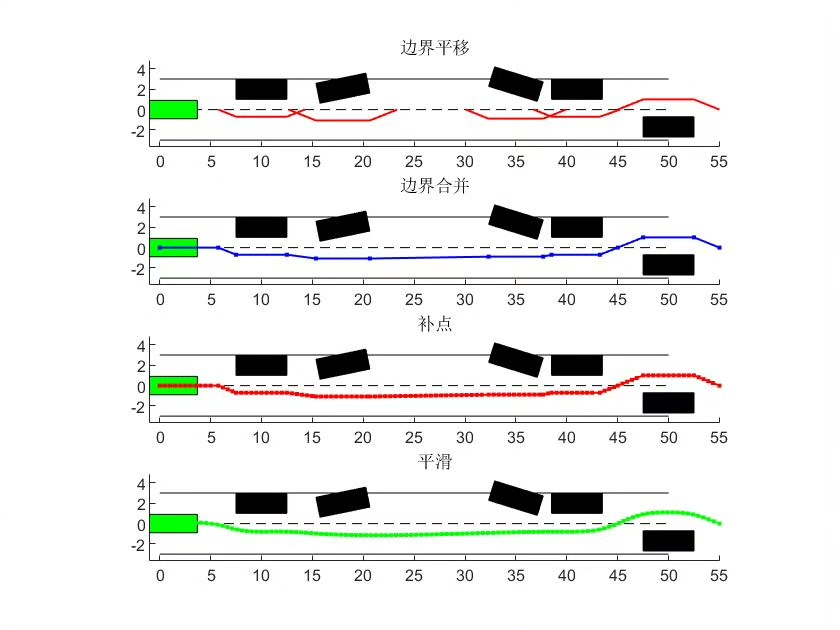
运行上述代码后,可以看到生成的路径会尽量避开红色的障碍物区域,从绿色的起点到绿色的终点。如果障碍物较多,可能需要增加迭代次数来保证路径的质量。
通过这种方式,我们成功地在MATLAB中复现了基于障碍物几何边界的路径规划算法。虽然可能比Autoware中的实现简单,但对于理解基本原理已经足够了。
当然,实际应用中还有很多需要优化的地方,比如障碍物的复杂形状、动态规划、速度优化等。但作为第一步,这样的实现已经是一个很好的开始。
7. 总结
这次复现的过程让我对路径规划有了更深的理解,尤其是在如何处理障碍物和规划路径之间平衡的问题。MATLAB在这个过程中提供了很大的便利,简洁的语法和强大的绘图功能让我能够快速试验和调整算法。
如果你对自动驾驶或路径规划感兴趣,不妨也尝试用MATLAB或者其他工具复现一些经典算法,既巩固知识又锻炼动手能力。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)