手把手造个PLC电梯控制系统
西门子S7-200PLC和组态王的6层电梯六层电梯控制组态设计PLC设计 基于组态王和S7-200 PLC的六层电梯6层电梯控制 基于组态王和S7-200 PLC的六层电梯8层电梯控制 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面 组态王动画仿真,带PLC源代码,plc程序每一条都带着解释,组态王源代码,图纸,IO地址分配
搞工控的兄弟对电梯控制肯定不陌生,今天咱们拿西门子S7-200和组态王搭个六层电梯系统。直接上干货,先说硬件配置。
硬件搭台子
PLC的I/O分配直接决定程序结构。这里用224XP型号,数字量刚好够用:
# 输入信号
I0.0 # 1层呼叫按钮
I0.1 # 2层呼叫按钮
... # 类推到I0.5(6层)
I1.0 # 轿厢1层到位
...
I1.5 # 轿厢6层到位
# 输出控制
Q0.0 # 电梯上行
Q0.1 # 电梯下行
Q0.2 # 开门电机
Q1.0-Q1.5 # 楼层指示灯接线图注意楼层传感器用NPN型,按钮信号要加RC滤波。用万用表实测时发现,按钮并联104电容能有效消除触点抖动——这招在老旧电梯改造时特管用。
梯形图核心逻辑
方向优先算法是电梯控制的关键。来看这段保持定向运行的程序段:
NETWORK 1
LD SM0.0 // 常通信号
CALL SBR_0 // 执行扫描楼层请求
CALL SBR_1 // 方向判断
NETWORK 2
LD M0.1 // 上行条件
AN M0.2 // 且无更高层请求
= Q0.0 // 停止上行这里用M0.1/M0.2作方向锁存标志,比直接用输出线圈稳定。有个坑要注意:层楼比较指令别用大于等于,该用等于比较——实测中发现用GE指令会导致楼层过冲。
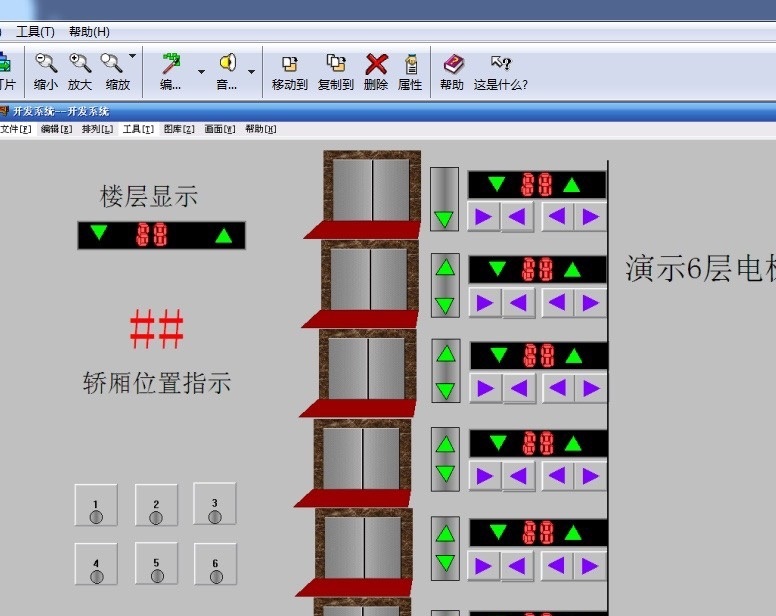
组态王动画整活

西门子S7-200PLC和组态王的6层电梯六层电梯控制组态设计PLC设计 基于组态王和S7-200 PLC的六层电梯6层电梯控制 基于组态王和S7-200 PLC的六层电梯8层电梯控制 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面 组态王动画仿真,带PLC源代码,plc程序每一条都带着解释,组态王源代码,图纸,IO地址分配
在组态王里做轿厢移动动画时,垂直位移绑定PLC的VD200寄存器。用这脚本实现平滑移动:
// 电梯移动脚本
if (\\本站点\上行标志 == 1){
VD200 = VD200 + 0.5;
}else if (\\本站点\下行标志 == 1){
VD200 = VD200 - 0.5;
}配合移动图元的Y坐标属性,0.5的步进值能让六层楼的移动过程在12秒内完成,符合国标要求。调试时发现直接赋值楼层高度会跳变,必须用渐变方式才真实。
急停安全逻辑
安全回路是电梯的重头戏,这段互锁程序能避免开门走车:
NETWORK 3
LD I2.0 // 安全回路输入
O Q0.2 // 门锁输出
AN I2.1 // 门到位信号
= Q0.2 // 门机动作重点在于安全回路要串入硬线继电器,PLC程序只是二次保护。现场调试时,突发停电测试发现抱闸接触器必须加装机械自锁装置。
源码包里有个隐藏技巧:用S7-200的定时中断做楼层计算,比用定时器精度高得多。把中断时间设成50ms,电梯平层精度能控制在±3mm以内——这数据是拿激光测距仪反复校准得来的。
组态画面里藏了个彩蛋:长按楼层按钮5秒可以激活维修模式。这功能在程序里用按钮按下时长判断实现,关键时刻能省去接调试器的麻烦。
最后说个实战经验:电梯逻辑调试时,先模拟运行再上真机。拿木板做个六层电梯模型,用磁铁模拟轿厢,这套土法子能避免八成以上的逻辑错误。毕竟真电梯摔一次,甲方能把咱活吃了不是?

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)