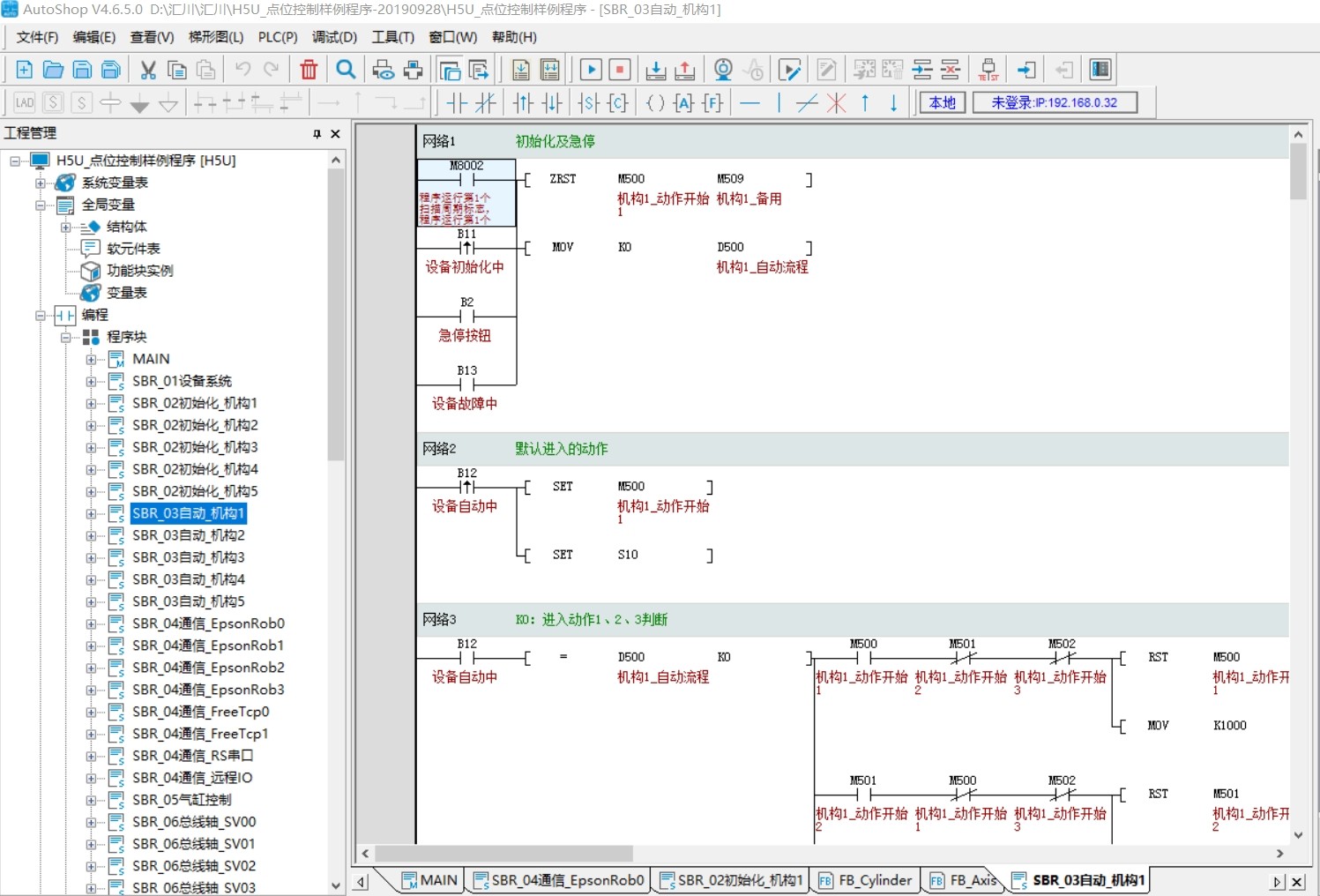
汇川H5U程序框架模板,伺服皆是总线控制,模板程序轴控和气缸采用FB块,直接调用即可
玩过PLC的都知道,总线伺服控制这块搞不好就要掉头发,但这个模板直接把现成的轴控FB块喂到你嘴边。反过来控制机器人动作也简单,把目标坐标写进对应的EIP数据区,触发个BOOL信号就能让机器人动起来。最骚的是框架里内置了互锁保护和动作超时检测,比传统自锁电路省了80%的调试时间。框架里的注释都是中文良心注释,每个FB块开头都有参数说明表。汇川H5U程序框架模板,伺服皆是总线控制,模板程序轴控和气缸采
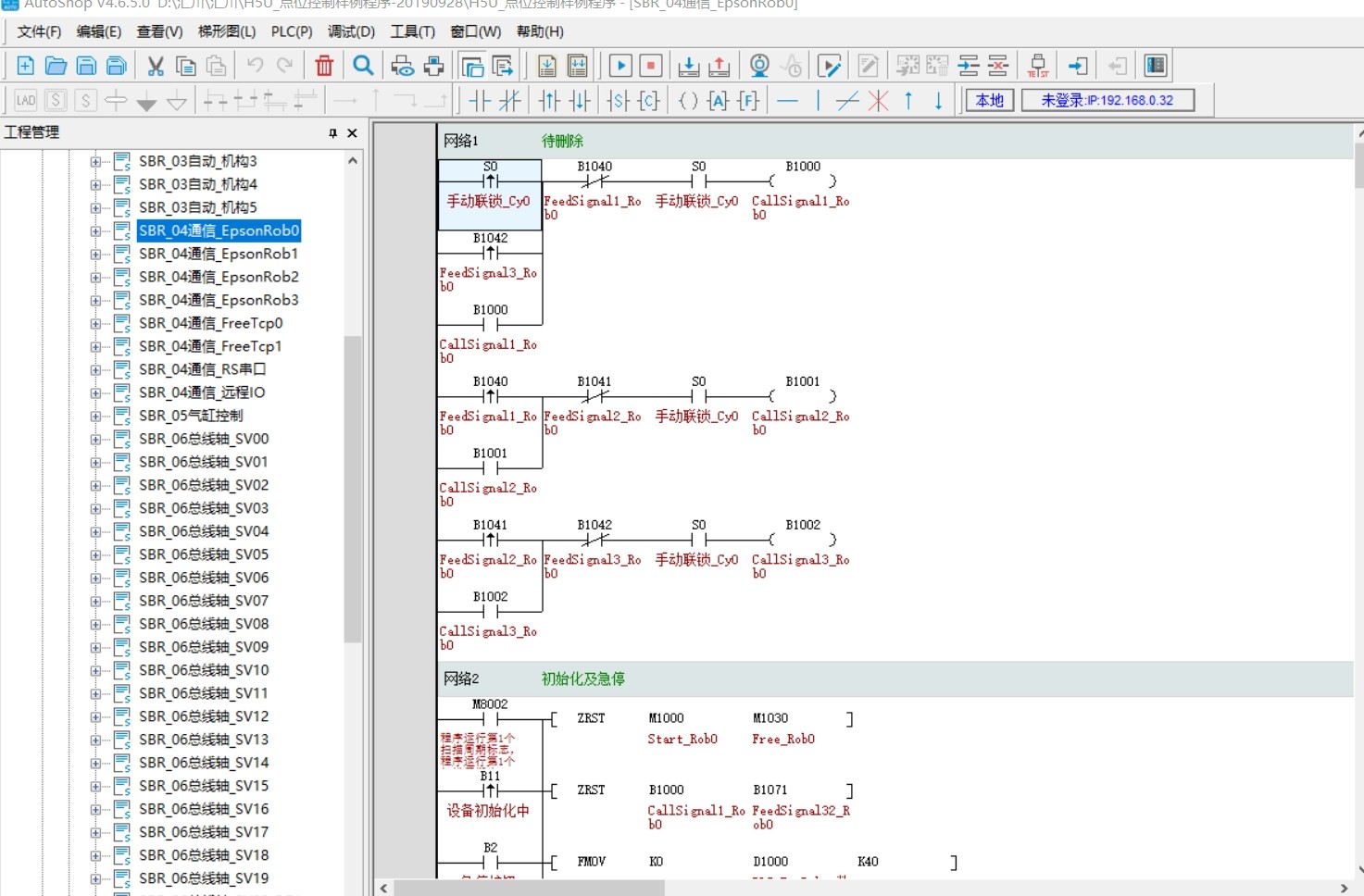
汇川H5U程序框架模板,伺服皆是总线控制,模板程序轴控和气缸采用FB块,直接调用即可。 还有和爱普生机器人的eip协议通讯。 内容很全面,用来学习或者做项目只需要 根据项目要求改一些IO和参数。 程序简单易懂。 对初学者有很大的帮助。 对有一定经验的工程师也有一定的提升。 如果你刚好要做运动控制项目, 这框架再合适不过了。 这个框架你可以自己引用到其他的PLC上面。
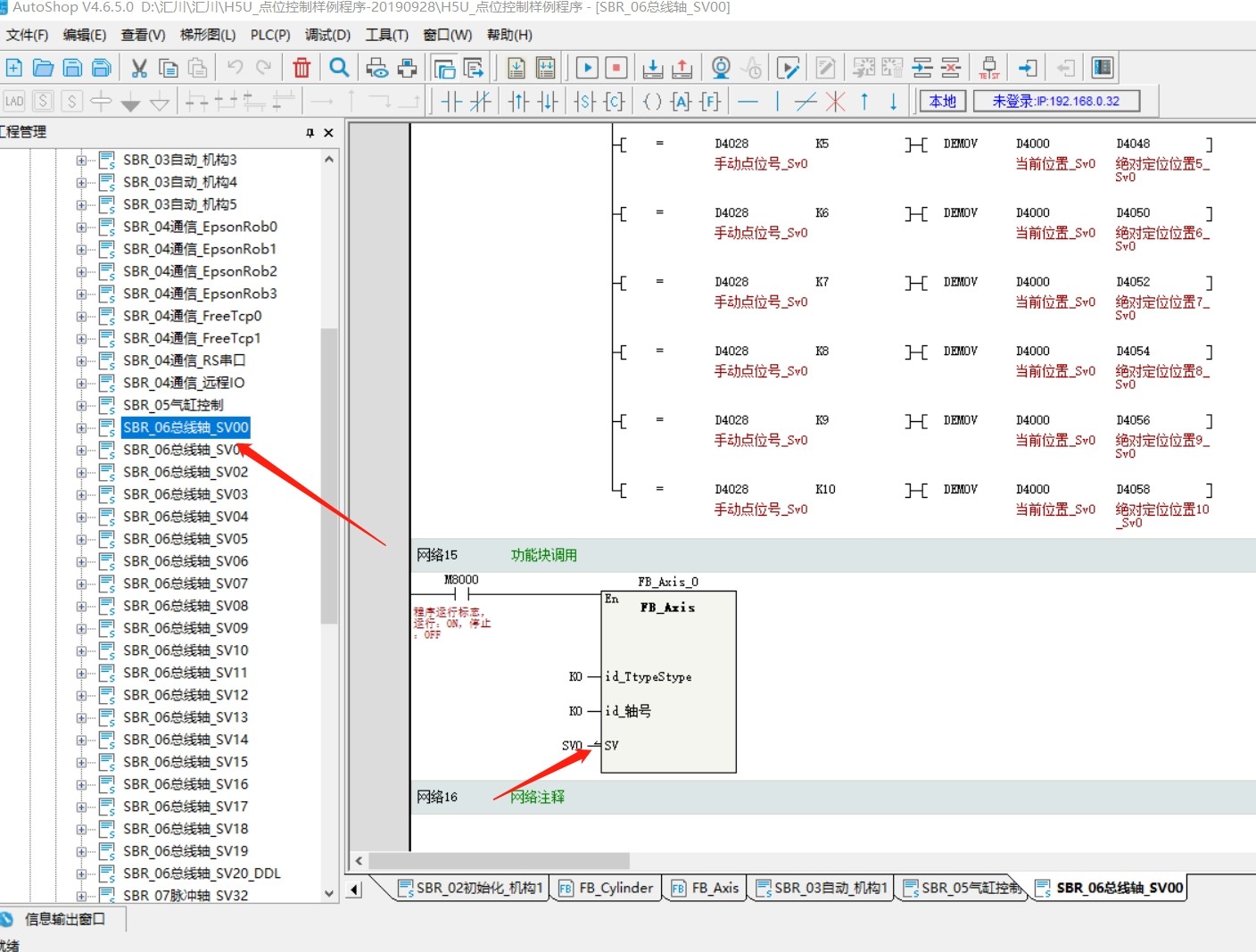
直接上干货——汇川H5U这个运动控制框架绝对是个宝藏。玩过PLC的都知道,总线伺服控制这块搞不好就要掉头发,但这个模板直接把现成的轴控FB块喂到你嘴边。比如这个AxisControl_FB块,调用时只需要填三个参数:
AxisControl_FB(
Axis:=伺服轴1,
TargetPosition:=500.0,
Execute:=启动信号);轴号、目标位置、触发信号一填,伺服就自己跑位去了。FB内部封装了加减速曲线、到位信号判断甚至异常报警,新人不用再纠结脉冲发送和编码器反馈怎么同步。
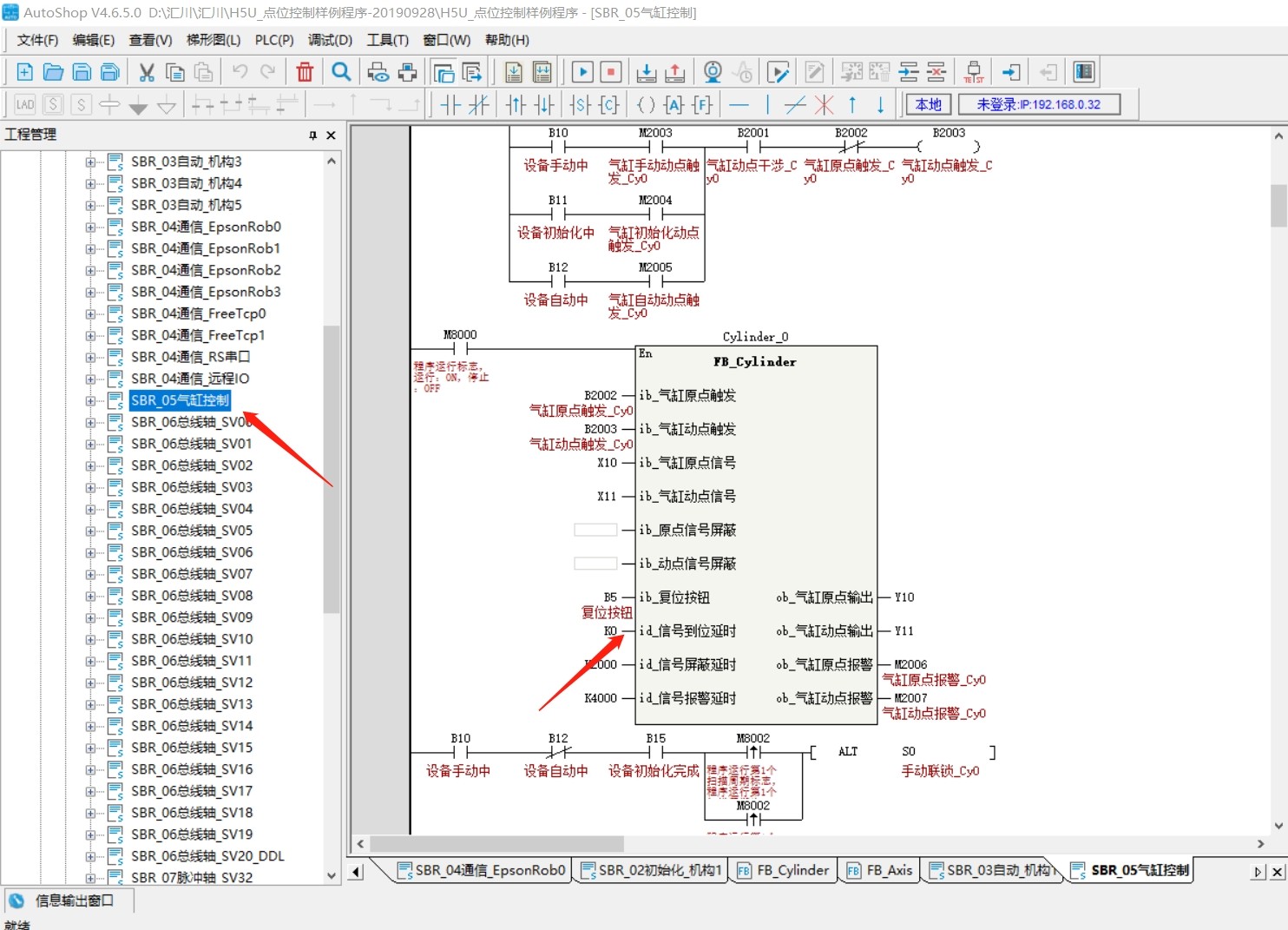
气缸控制更简单粗暴,每个气缸对应一个Cylinder_FB块。我见过有人用这个模板做8个气缸的流水线,每个气缸控制就两行代码:
Cylinder_FB(
Out:=气缸1_伸出,
In:=气缸1_缩回,
SensorExt:=到位检测1,
SensorRet:=复位检测1);最骚的是框架里内置了互锁保护和动作超时检测,比传统自锁电路省了80%的调试时间。有次现场急单,我把这个FB复制到另一个项目改改IO地址,两天就交机了。
汇川H5U程序框架模板,伺服皆是总线控制,模板程序轴控和气缸采用FB块,直接调用即可。 还有和爱普生机器人的eip协议通讯。 内容很全面,用来学习或者做项目只需要 根据项目要求改一些IO和参数。 程序简单易懂。 对初学者有很大的帮助。 对有一定经验的工程师也有一定的提升。 如果你刚好要做运动控制项目, 这框架再合适不过了。 这个框架你可以自己引用到其他的PLC上面。
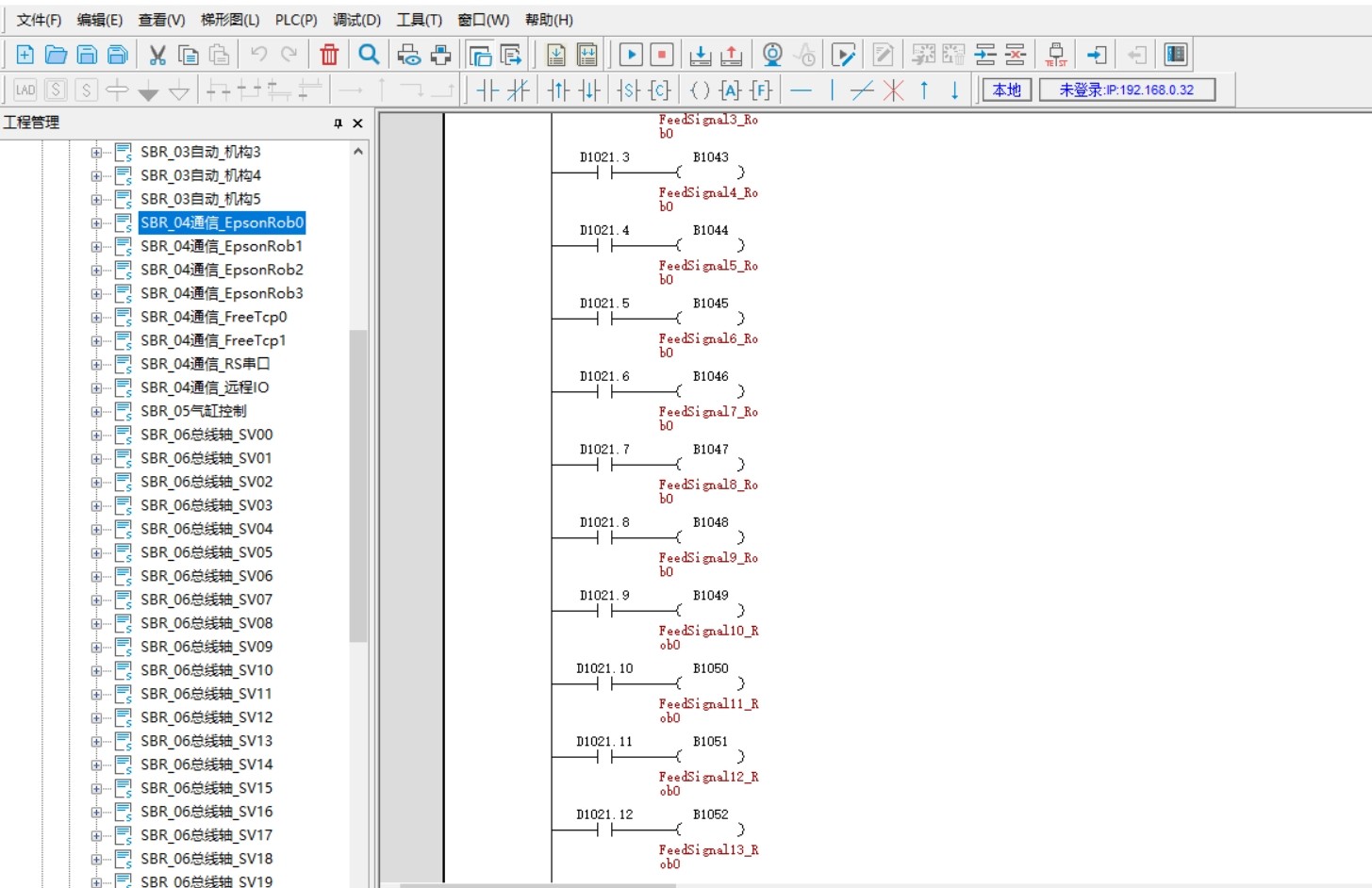
和爱普生机器人的EIP通讯才是隐藏大招。框架里直接预置了EDS文件,组态时像配本地IO一样拖放机器人轴数据。上次做上下料项目,机器人当前坐标直接映射到PLC的D寄存器:
Robot_CurrentX := EIP_DataArea[0].RealValue;
Robot_Status := EIP_DataArea[4].IntValue;反过来控制机器人动作也简单,把目标坐标写进对应的EIP数据区,触发个BOOL信号就能让机器人动起来。这种通讯方式比走ModbusTCP舒服太多,实时性堪比本地轴控制。
框架里的注释都是中文良心注释,每个FB块开头都有参数说明表。有经验的可以扒开FB看实现逻辑,比如伺服使能信号的互锁机制:
IF NOT 安全门开关 THEN
伺服使能 := FALSE;
CurrentError := 16#8001;
END_IF这种防御式编程对新手特别友好。我带徒弟时就拿这个框架当教材,从基础IO控制到Ethernet/IP通讯都能覆盖。最近发现有人把它移植到西门子1200PLC上用,虽然要改部分指令,但整体架构完全通用。
要我说这框架最值钱的地方在于把最佳实践固化成了可复用的模块。新手按图索骥不会跑偏,老鸟又能快速搭建项目骨架。下次做运动控制项目别急着从零开始,先把这个模板拆开看看,说不定能省下一个月加班时间。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)