基于STM32F103的PID温度控制带自整定实现
·
pid温度控制带自整定,stm32f103源代码,原理图,调试工具,支持modbus温度控制精度正负0.2度,
一、前言
在工业控制以及许多对温度精度要求较高的场景中,实现精确的温度控制至关重要。今天咱就来讲讲基于STM32F103的PID温度控制,不仅带自整定功能,还支持Modbus协议,温度控制精度能达到正负0.2度。
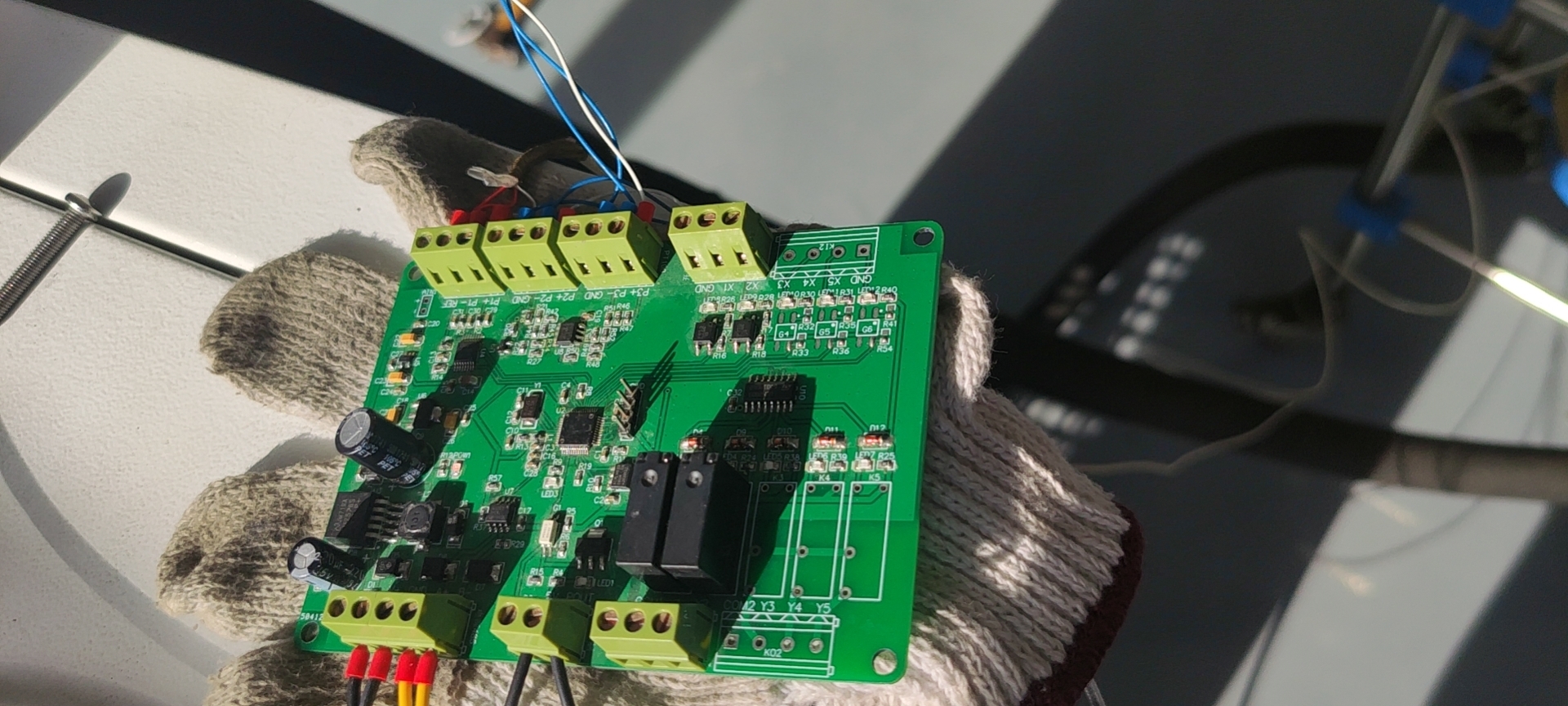
二、原理图
原理图是硬件设计的基础,它决定了整个系统各部分如何协同工作。在我们这个温度控制系统中,主要包含以下几个部分:
- STM32F103核心板:作为整个系统的大脑,负责处理PID算法、Modbus通信等逻辑。
- 温度传感器:比如常用的DS18B20,通过单总线与STM32连接,用于实时采集温度数据。
- 加热或制冷设备驱动电路:根据PID计算结果,控制加热丝或者制冷片的工作,从而调节温度。以加热丝驱动为例,可能会用到三极管或者MOS管搭建驱动电路,将STM32输出的控制信号进行功率放大来驱动加热丝。
三、调试工具
- 硬件调试:使用示波器来观察温度传感器输出信号是否正常,查看驱动电路的输出波形是否符合预期。比如,检查驱动加热丝的PWM信号的占空比是否能根据PID算法正确调整。
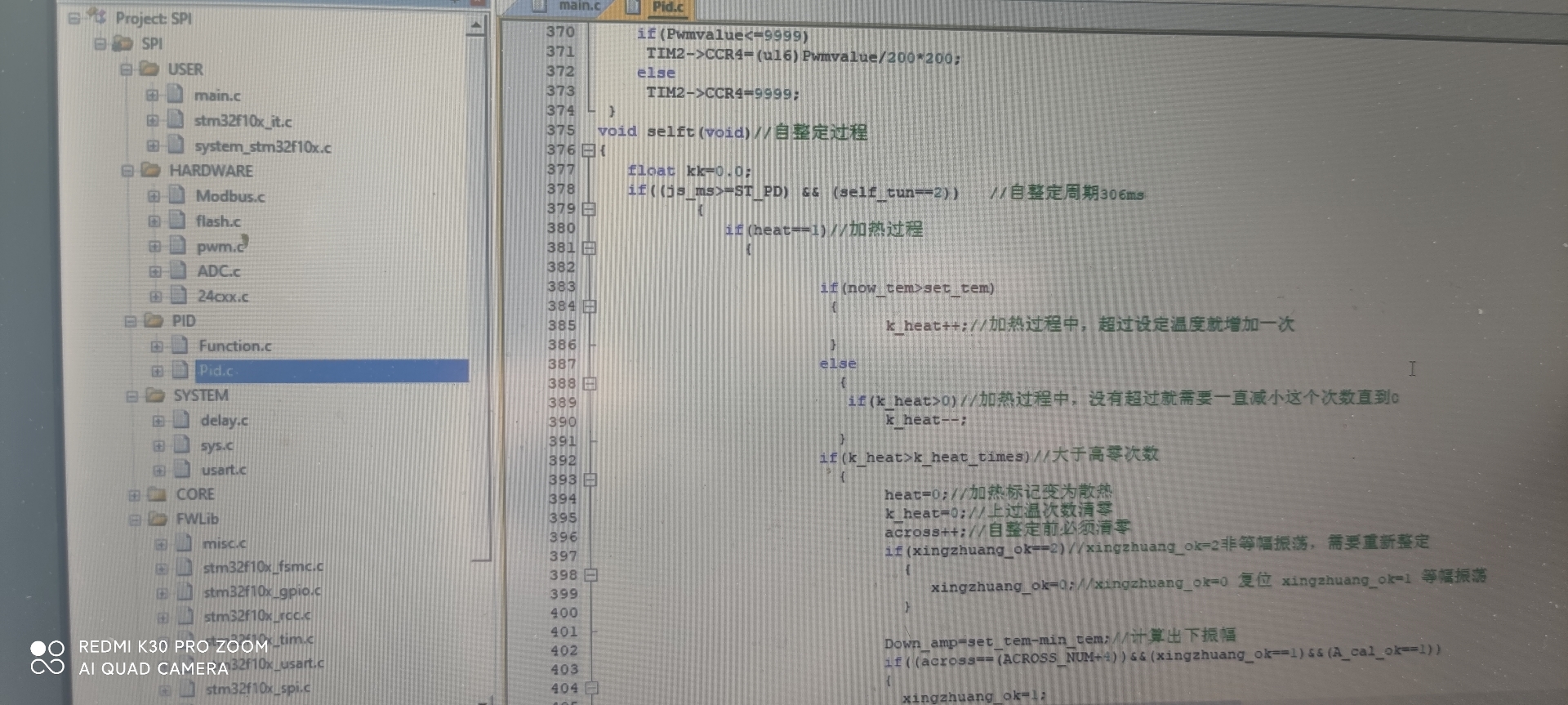
- 软件调试:利用STM32CubeIDE或者Keil等开发工具,通过设置断点、查看变量值等方式来调试代码。比如在PID计算函数中,查看每次计算后的P值、I值、D值以及最终输出的控制量是否合理。
四、源代码解析
(一)PID算法实现
// PID结构体定义
typedef struct
{
float SetPoint; // 设定值
float Proportion; // 比例系数
float Integral; // 积分系数
float Derivative; // 微分系数
float LastError; // 上一次的误差
float SumError; // 误差累计
float Output; // 输出值
} PID_TypeDef;
// PID计算函数
float PID_Calc(PID_TypeDef *pid, float NextPoint)
{
float Error;
Error = pid->SetPoint - NextPoint;
pid->SumError += Error;
pid->Output = pid->Proportion * Error +
pid->Integral * pid->SumError +
pid->Derivative * (Error - pid->LastError);
pid->LastError = Error;
return pid->Output;
}这段代码首先定义了一个PID结构体,用来存储PID控制所需的各种参数,像设定值、比例积分微分系数等。PID_Calc函数则是实现了PID控制算法的核心逻辑,通过当前测量值与设定值的误差,结合比例、积分、微分运算,得出最终的控制输出值。
(二)温度采集与处理
// 假设DS18B20初始化函数
void DS18B20_Init(void)
{
// 初始化DS18B20相关GPIO,配置单总线协议相关参数
}
// 读取DS18B20温度函数
float Read_DS18B20_Temp(void)
{
// 按照DS18B20协议读取温度数据,转换为实际温度值并返回
uint16_t temp;
float temperature;
// 省略具体的单总线通信代码
temp = (uint16_t)(Read_DS18B20_Data() & 0xFFFF);
if (temp & 0x8000)
{
temp = ~temp + 1;
temperature = -((float)temp * 0.0625);
}
else
{
temperature = (float)temp * 0.0625;
}
return temperature;
}DS18B20Init函数用于初始化DS18B20温度传感器相关的GPIO口,并配置单总线协议的参数。ReadDS18B20_Temp函数按照DS18B20的通信协议读取温度数据,并将原始数据转换为实际的温度值返回,以便后续PID控制使用。
(三)Modbus通信部分
// Modbus初始化函数
void Modbus_Init(void)
{
// 初始化串口等Modbus通信相关硬件资源
USART_InitTypeDef USART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
}
// Modbus数据处理函数
void Modbus_Process(void)
{
// 处理接收到的Modbus指令,如设置温度设定值等
if (USART_GetFlagStatus(USART1, USART_FLAG_RXNE)!= RESET)
{
uint8_t data = USART_ReceiveData(USART1);
// 根据Modbus协议解析数据,这里省略具体解析代码
if (/* 解析出设置温度设定值指令 */)
{
// 设置PID的SetPoint
pid.SetPoint = /* 新的设定值 */;
}
}
}ModbusInit函数主要初始化串口等Modbus通信所需的硬件资源,这里以USART1为例进行初始化。ModbusProcess函数则负责处理接收到的Modbus指令,当检测到串口有数据接收时,按照Modbus协议解析数据,比如接收到设置温度设定值的指令,就更新PID控制的设定值。
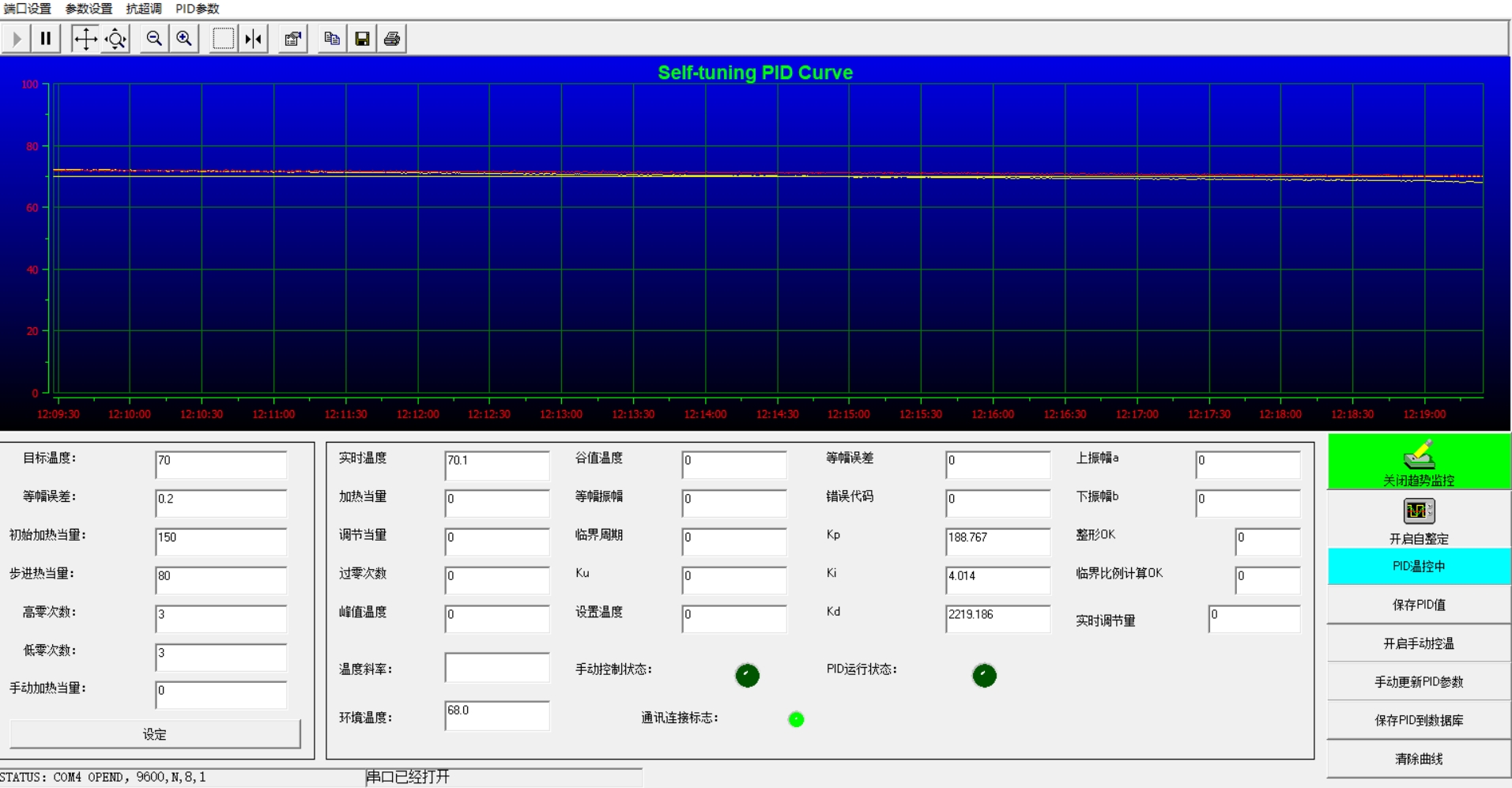
五、实现正负0.2度精度控制要点
- PID参数自整定:采用合适的自整定算法,如Ziegler - Nichols方法。在系统运行初期,通过一定的激励信号,观察系统的响应,自动调整PID的比例、积分、微分系数,以达到最佳控制效果。
- 硬件精度保证:选择高精度的温度传感器和稳定的驱动电路。同时,对硬件电路进行合理的布局和布线,减少电磁干扰对温度采集和控制信号的影响。
通过上述的原理图设计、代码实现以及调试手段,基于STM32F103的带自整定PID温度控制系统就能实现高精度的温度控制,并通过Modbus协议方便地与其他设备进行交互。希望这篇博文能给正在研究温度控制的小伙伴们一些启发!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 23
23 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)