C#联合OpenCvSharp开发的视觉源码程序:模板匹配、找线找圆、预处理功能全包
c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源码,包含图像显示控件,绘制roi
工业视觉系统在现代制造业中扮演着至关重要的角色,本文将对一个基于C#和OpenCV开发的工业视觉系统的核心功能模块进行详细解析。该系统集成了多品牌相机支持、图像处理算法、标定工具和二维码识别等关键功能。
多相机设备集成框架
统一的相机接口设计
系统通过Icam接口抽象了不同品牌相机的操作,实现了统一的相机控制模型:
public interface Icam : IDisposable
{
event ImgGetHandle setImgGetHandle;
event EventHandler CamConnectHnadle;
bool OpenCam(int camIndex, ref string msg);
void CloseCam();
bool OneShot();
bool ContinueGrab();
void StopGrab();
int CamNum { get; }
bool IsAlive { get; }
bool IsGrabing { get; }
bool SetExposureTime(long dValue);
bool SetGain(long dValue);
bool GetExposureTime(out long dValue);
bool GetGain(out long dValue);
CamType currCamType { get; }
int CamIndex { get; }
}该接口定义了相机的基本操作:打开关闭、单帧/连续采集、参数设置等,为不同品牌相机提供了统一的编程接口。
多品牌相机支持实现
系统目前支持三大主流工业相机品牌:
1. Basler相机集成
- 支持GigE和USB3.0接口相机
- 完整的参数控制:曝光时间、增益调节
- 自动识别相机类型并应用相应参数设置
- 心跳机制确保网络相机稳定连接
2. 大华相机支持
- 软件触发模式控制
- 可配置的图像缓存管理
- 独立的连续采集线程处理
3. 海康相机集成
- 多格式图像数据转换支持
- 彩色/黑白图像自动识别处理
- 灵活的触发模式配置
每种相机都通过专门的实现类封装了品牌特定的SDK调用,同时对外提供统一的接口,实现了设备无关的编程模型。
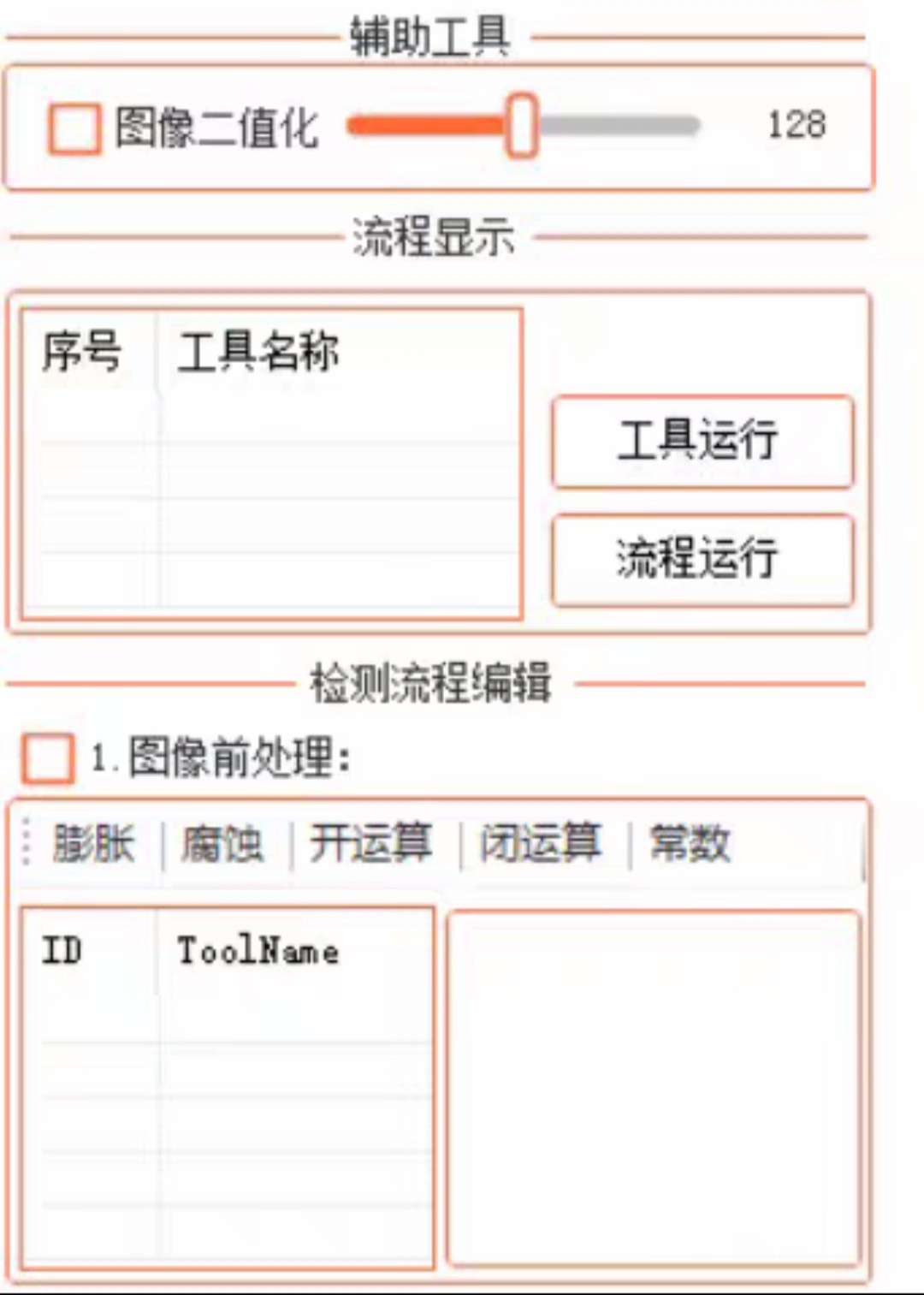
先进的图像处理工具箱
形态学处理模块
系统提供了完整的形态学运算支持:
public static Mat Morphological_Process(Mat src, MorphTypes mophStyle,
MorphShapes shape, Size kSize, int iterations = 1)支持腐蚀、膨胀、开运算、闭运算、梯度等标准形态学操作,可自定义结构元素形状和尺寸,适用于噪声去除、区域连接、边界提取等多种应用场景。
图像增强算法
系统集成了多种图像增强技术:
直方图均衡化 - 改善图像对比度,增强细节表现
拉普拉斯锐化 - 增强图像边缘和细节
伽马变换 - 非线性对比度调整,适应不同光照条件

c#联合opencvsharp开发的视觉源码程序 包含模板匹配,找线找圆,预处理等功能 全部源码,包含图像显示控件,绘制roi
自适应增强 - 基于局部均值的对比度增强算法
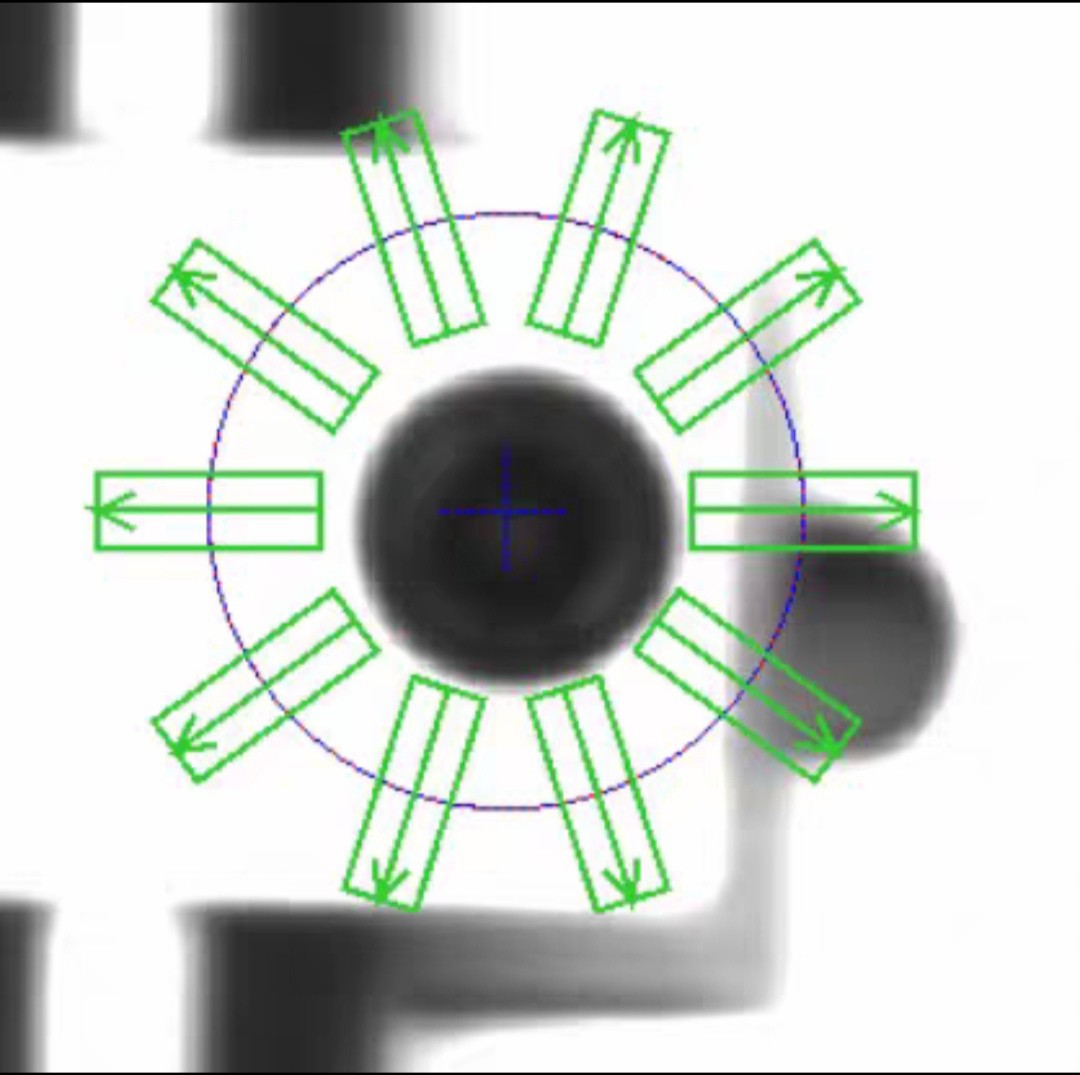
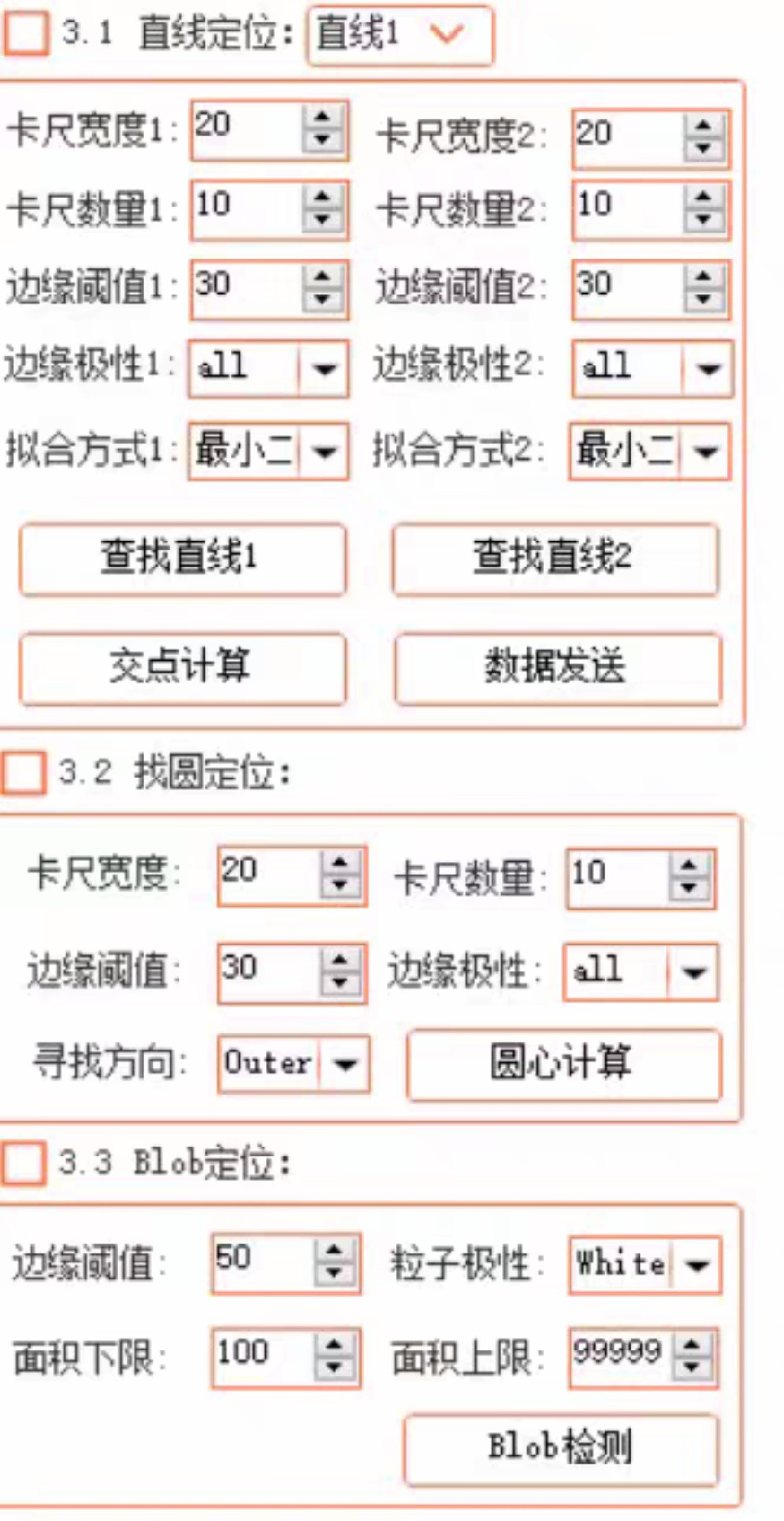
边缘检测工具
提供多种边缘检测方案:
- Canny边缘检测器,支持双阈值控制
- Sobel算子,支持X/Y方向及合并梯度
- Laplacian算子,用于二阶微分边缘检测
高精度标定系统
手眼标定实现
系统实现了基于仿射变换的手眼标定算法:
static public Mat VectorToHomMat2d(List<Point2d> calib_img_pixel_coordinates,
List<Point2d> calib_img_rob_coordinates)通过9点标定法建立像素坐标系与机器人坐标系之间的转换关系,支持:
- 标定矩阵计算和验证
- RMS误差评估标定精度
- 双向坐标转换(像素↔机器人)
旋转中心计算
针对旋转运动平台,系统提供了旋转中心标定算法:
public static Point2f getRotateCenter(Point2f point1, Point2f point2, double RarotionAngle)基于旋转前后的标记点位置和旋转角度,精确计算旋转中心坐标。
二维码识别系统
Data Matrix识别引擎
系统集成了Halcon库的Data Matrix识别功能:
public static HTuple create_data_code_2d_model(HTuple CodeType,
EumDataMoudulParma DataMoudulParma)支持多种二维码类型:
- Data Matrix ECC 200
- QR Code
- PDF417
- Aztec Code等
训练与识别流程
模型训练阶段:
- 支持基于样本图像的模型训练
- 可配置识别参数(极性、对比度、超时等)
- 模型序列化保存,支持重复使用
识别阶段:
- 实时图像解码
- 多码同时识别
- 可视化结果显示
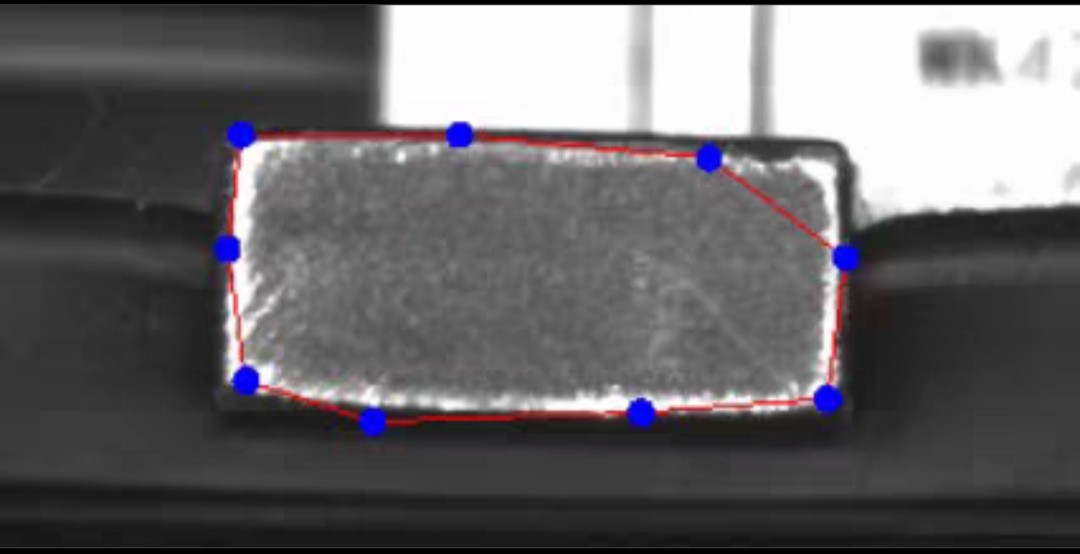
轮廓处理与分析
系统提供了强大的轮廓操作工具:
static public CVPoint[] ContourCombine(CVPoint[] contour1, CVPoint[] contour2)
static public CVPoint[] ContourSubtract(CVPoint[] contour1, CVPoint[] contour2)支持轮廓的合并、相减、边界点剔除等操作,为复杂形状分析提供基础。
形状匹配算法
通过C++ DLL集成了高性能的形状匹配引擎:
多尺度匹配:支持图像金字塔,实现快速粗定位和精确匹配
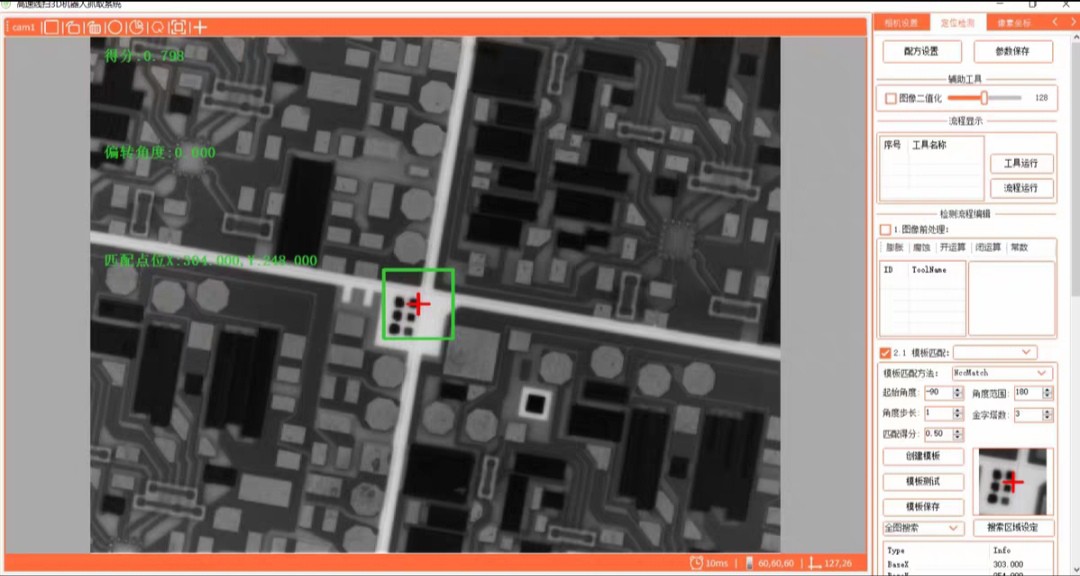
多角度匹配:可配置角度搜索范围和步长
多尺度匹配:支持缩放因子的自动适应
匹配算法基于边缘梯度方向,对光照变化和部分遮挡具有较好的鲁棒性。
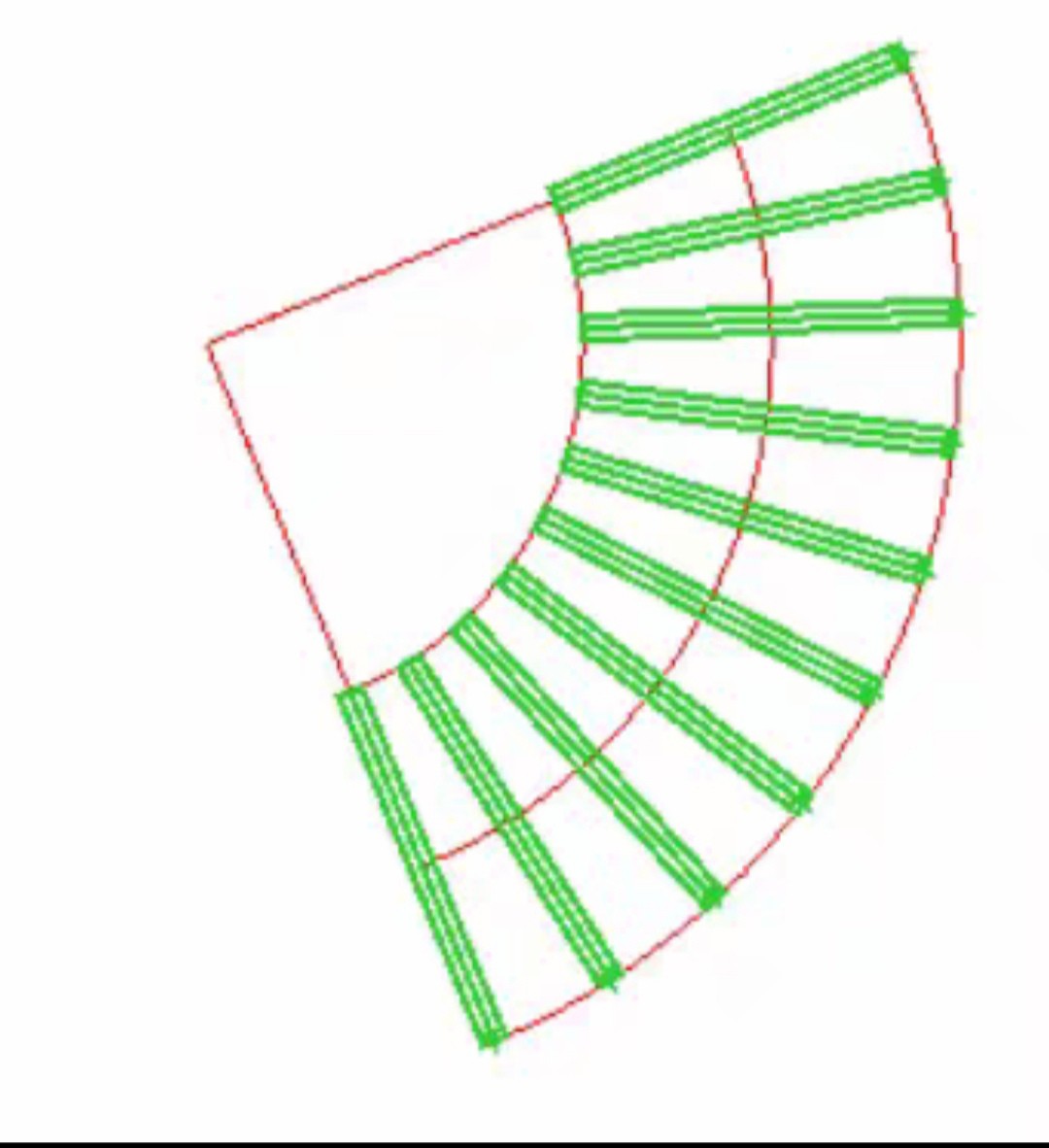
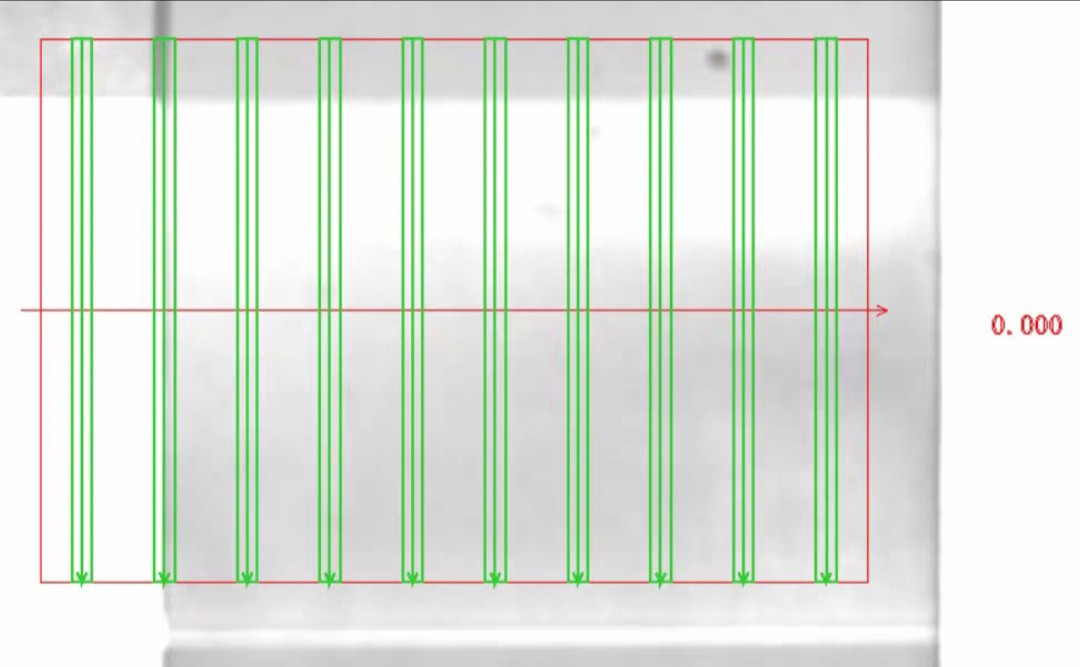
胶路检测专用模块
系统还包含了专门的胶路检测功能:
public class GlueCheckTask : ToolBase实现胶路完整性、位置、宽度等质量指标的自动检测。
系统架构特点
模块化设计
各功能模块高度独立,支持按需使用和单独升级。图像处理、相机控制、标定计算等模块通过清晰的接口进行交互。
性能优化
- 多线程图像采集和处理
- C++高性能算法集成
- 内存高效管理,避免不必要的图像拷贝
扩展性
通过接口抽象和基类设计,系统易于扩展新的相机品牌、算法功能和检测任务。
应用场景
该视觉系统框架适用于:
- 工业产品质量检测
- 机器人视觉引导
- 精密尺寸测量
- 二维码/条码识别
- 定位与对位系统
系统通过严谨的架构设计和完整的功能覆盖,为工业视觉应用提供了稳定可靠的软件基础,显著降低了视觉系统开发的难度和周期。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 3
3 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)