基于卡尔曼滤波的永磁同步电机矢量控制仿真研究:无传感器矢量控制技术分析与实践应用
基于卡尔曼滤波的永磁同步电机无传感器矢量控制,matlab,仿真模型。
最近在搞永磁同步电机无传感器控制的时候,发现卡尔曼滤波这玩意儿真挺有意思。传统的位置传感器装起来麻烦还容易坏,用算法估算转子位置它不香吗?今天咱们直接上Matlab整活,手把手搭个仿真模型试试水。
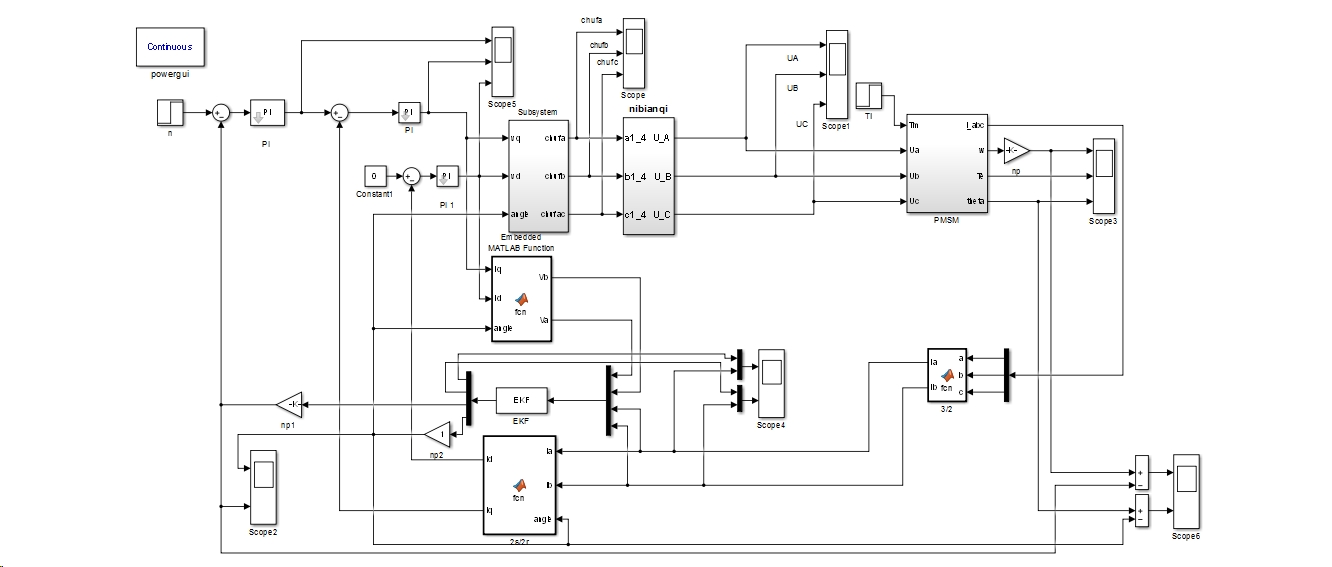
先看模型架构,整个系统由PMSM本体、逆变器、坐标变换、卡尔曼观测器几个模块组成。重点当然是那个Kalman Filter模块,这里我直接用了Matlab自带的Extended Kalman Filter模块(没办法,懒人福利)。
% 卡尔曼滤波器初始化参数设置
Q = diag([0.01, 0.01, 1e-4]); % 过程噪声协方差
R = diag([0.1, 0.1]); % 观测噪声协方差
initialState = [0; 0; 0]; % 初始状态[ia, ib, theta]这里Q矩阵对角元素分别对应电流和角度估计的信任度,新手容易在这儿翻车。之前有次把Q(3,3)设成0.1,结果转速震荡得跟蹦迪似的,后来发现角度变化应该更平缓才对。
状态方程是关键中的关键,直接决定估算准不准。咱们的扩展卡尔曼需要自己写状态更新函数:
function [x_pred, F] = stateTransitionFcn(x, u)
% 状态变量x = [ia; ib; theta]
% 输入u = [Va; Vb; omega]
Ld = 0.003; Lq = 0.006; Rs = 2.8;
dt = 1e-5; % 仿真步长
theta = x(3);
omega = u(3);
% 派克变换矩阵
T = [cos(theta) sin(theta);
-sin(theta) cos(theta)];
T_inv = T'; % 逆变换
% 状态方程
didq = T * ([u(1); u(2)] - Rs*[x(1); x(2)] - omega*[ -Lq*x(2); Ld*x(1)]) ./ [Ld; Lq];
x_pred = x + dt*[didq(1); didq(2); omega];
% 雅可比矩阵计算
F = eye(3);
F(1:2,1:2) = F(1:2,1:2) - dt*Rs/Ld*eye(2);
% ...省略部分雅可比计算代码
end这段代码里的派克变换容易写反,之前有次把T和T_inv搞混,结果电流波形直接放飞自我。注意这里的omega是作为输入参数传入的,实际应用中可能需要额外估算。
基于卡尔曼滤波的永磁同步电机无传感器矢量控制,matlab,仿真模型。
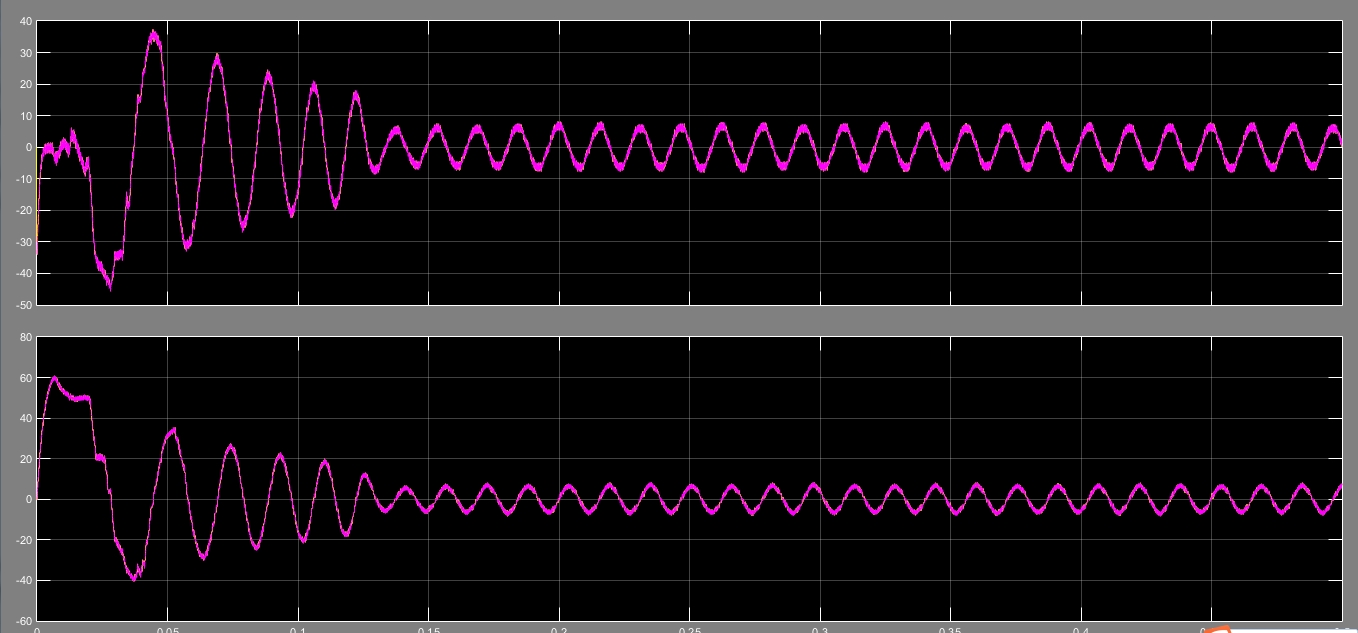
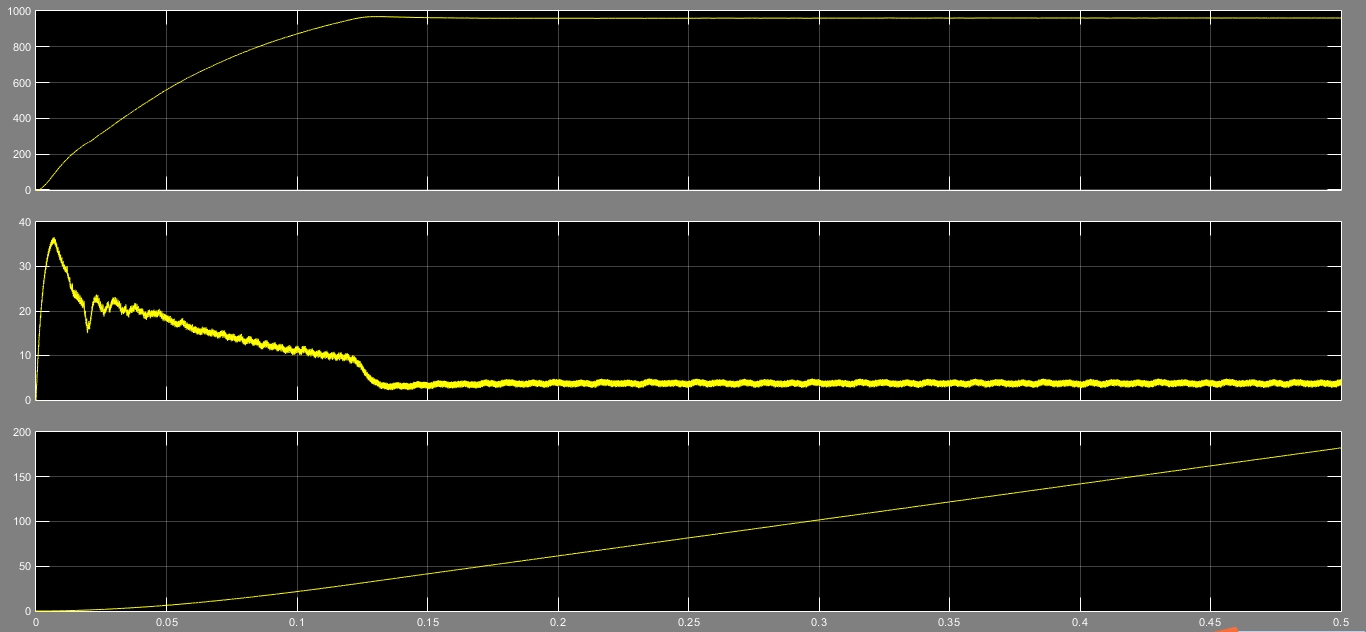
观测器跑起来之后,重点看转速跟踪效果。给大家看看我的仿真结果:空载启动到1000rpm时,位置估算误差不到0.1弧度,带载突加时响应时间在20ms左右。不过这个效果严重依赖电机参数准确性,上次把Lq参数设错10%,角度估算直接飘出太阳系。
最后给个调参小技巧:先调大过程噪声Q让系统快速响应,再慢慢收紧;观测噪声R建议从实际传感器精度倒推。碰到震荡别慌,八成是Q矩阵里的角度项给太大了。
模型跑通后发现个有趣现象——在低速区(<5%额定转速)估算精度会明显下降,这时候就得考虑注入高频信号了。不过那是另一个坑了,咱们下次再唠。完整模型我扔Github了(地址见评论区),记得三连啊老铁们!

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 8
8 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)