org.openpnp.vision.pipeline.stages.HistogramEqualizeAdaptive
·
文章目录
org.openpnp.vision.pipeline.stages.HistogramEqualizeAdaptive
功能
用于对图像的指定通道进行对比度受限的自适应直方图均衡化(CLAHE, Contrast Limited Adaptive Histogram Equalization)。与普通的 HistogramEqualize 不同,CLAHE 将图像分割成多个小块(tiles),在每个小块内分别进行直方图均衡化,并限制对比度的放大倍数,从而避免放大图像噪声和过度增强局部对比度。该阶段适用于光照不均匀、局部阴影明显的图像。
参数
| 参数名 | 类型 | 默认值 | 描述 |
|---|---|---|---|
channelsToEqualize |
ChannelsToEqualize |
All |
选择需要均衡化的通道。对于灰度图像此参数无效。可选值:First、Second、Third、FirstAndSecond、FirstAndThird、SecondAndThird、All。 |
clipLimit |
Double |
2.0 |
对比度限制阈值。值越低,限制越强(抑制噪声但对比度提升有限);值越高,允许的对比度增强越强,但可能放大噪声。 |
numberOfTileRows |
int |
10 |
图像在垂直方向上分割的行数(tile 行数)。 |
numberOfTileCols |
int |
16 |
图像在水平方向上分割的列数(tile 列数)。 |
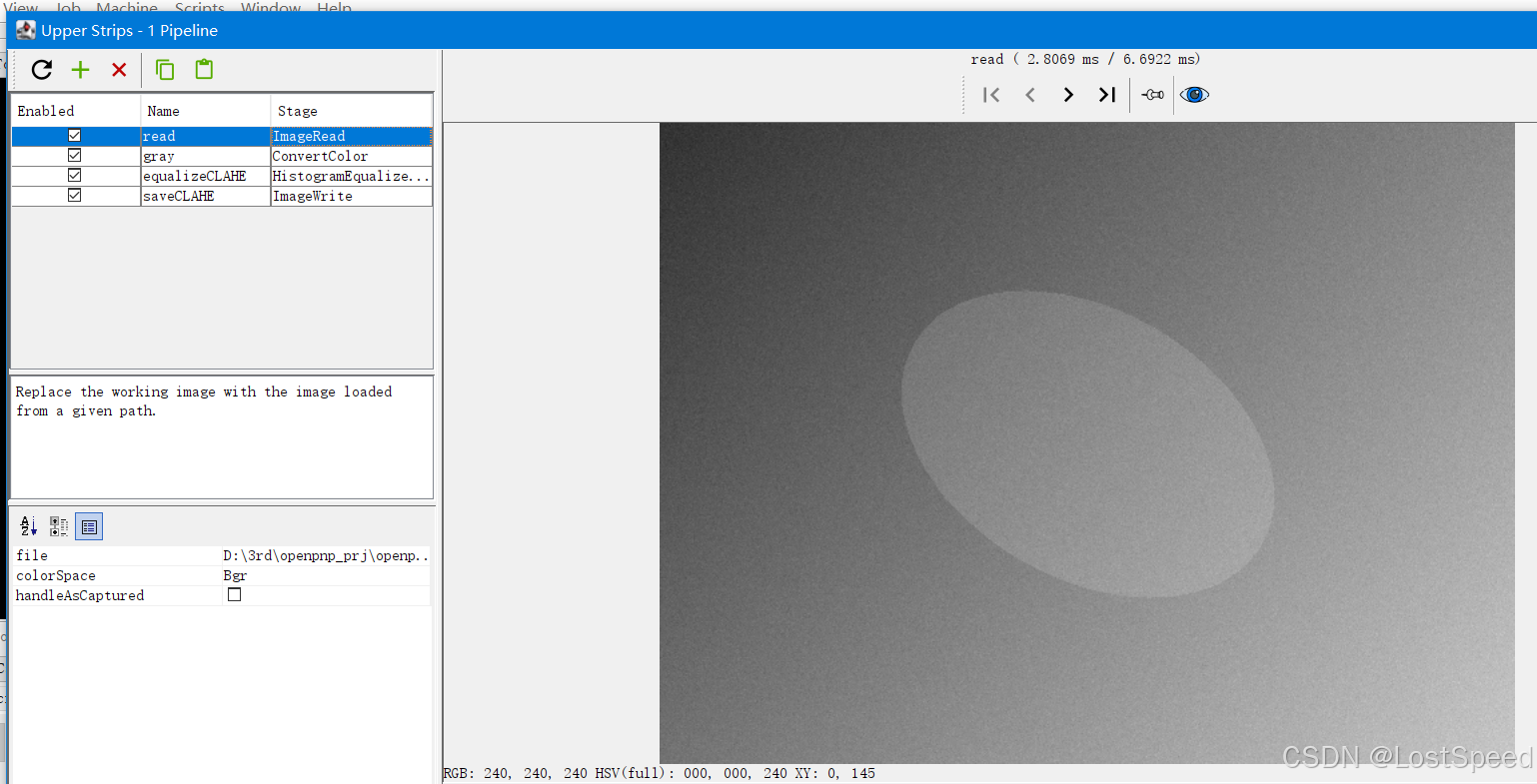
例子 - 灰度图
import cv2
import numpy as np
def generate_nonuniform_illumination_image(output_path="nonuniform.png", size=(640, 480)):
# 创建从暗 (50) 到亮 (200) 的线性渐变背景
bg = np.zeros((size[1], size[0]), dtype=np.uint8)
for y in range(size[1]):
for x in range(size[0]):
# 亮度随 x+y 增加,产生对角线渐变
val = 50 + int(150 * (x + y) / (size[0] + size[1]))
bg[y, x] = min(255, val)
# 创建中央椭圆区域(前景),亮度与背景相近(轻微差异)
fg_mask = np.zeros((size[1], size[0]), dtype=np.uint8)
center = (size[0]//2, size[1]//2)
axes = (150, 100)
angle = 30
cv2.ellipse(fg_mask, center, axes, angle, 0, 360, 255, -1)
# 在椭圆内赋予与背景稍有不同的亮度(模拟低对比度物体)
result = bg.copy()
mask = fg_mask > 0
# 椭圆内亮度 = 背景亮度 * 0.9 + 30,产生细微差异
ellipse_brightness = (bg[mask].astype(np.float32) * 0.9 + 30).astype(np.uint8)
result[mask] = ellipse_brightness
# 添加轻微高斯噪声(模拟真实图像)
noise = np.random.normal(0, 5, result.shape).astype(np.int16)
result = np.clip(result.astype(np.int16) + noise, 0, 255).astype(np.uint8)
cv2.imwrite(output_path, result)
print(f"非均匀光照测试图片已生成: {output_path}")
if __name__ == "__main__":
generate_nonuniform_illumination_image()
<cv-pipeline>
<stages>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageRead" name="read" enabled="true" file="D:\3rd\openpnp_prj\openpnp-official\openpnp-test-images\my_test\nonuniform.png" color-space="Bgr" handle-as-captured="false"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ConvertColor" name="gray" enabled="true" conversion="Bgr2Gray"/>
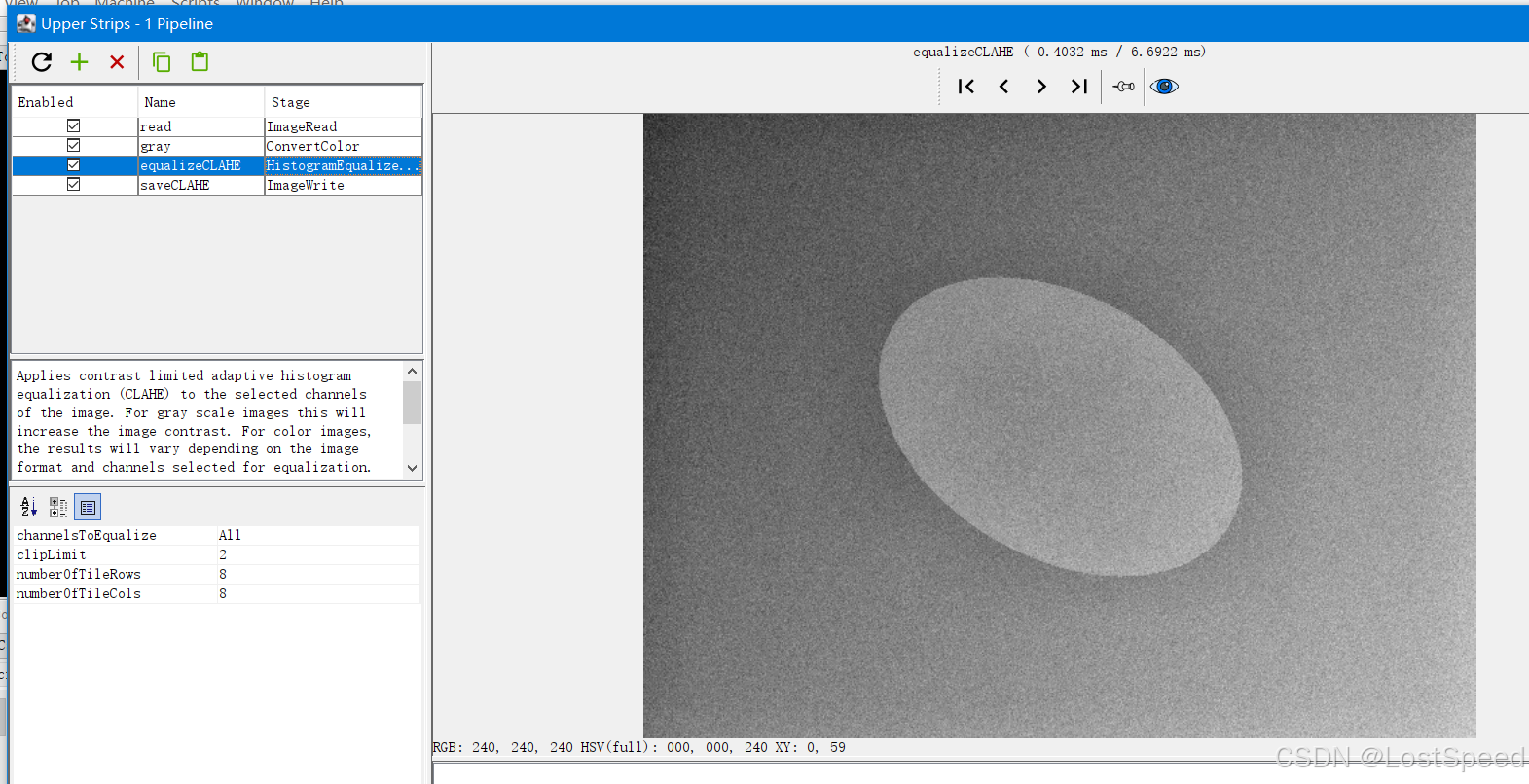
<cv-stage class="org.openpnp.vision.pipeline.stages.HistogramEqualizeAdaptive" name="equalizeCLAHE" enabled="true" channels-to-equalize="All" clip-limit="2.0" number-of-tile-rows="8" number-of-tile-cols="8"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageWrite" name="saveCLAHE" enabled="true" file="output_clahe_equalized.png"/>
</stages>
</cv-pipeline>
效果
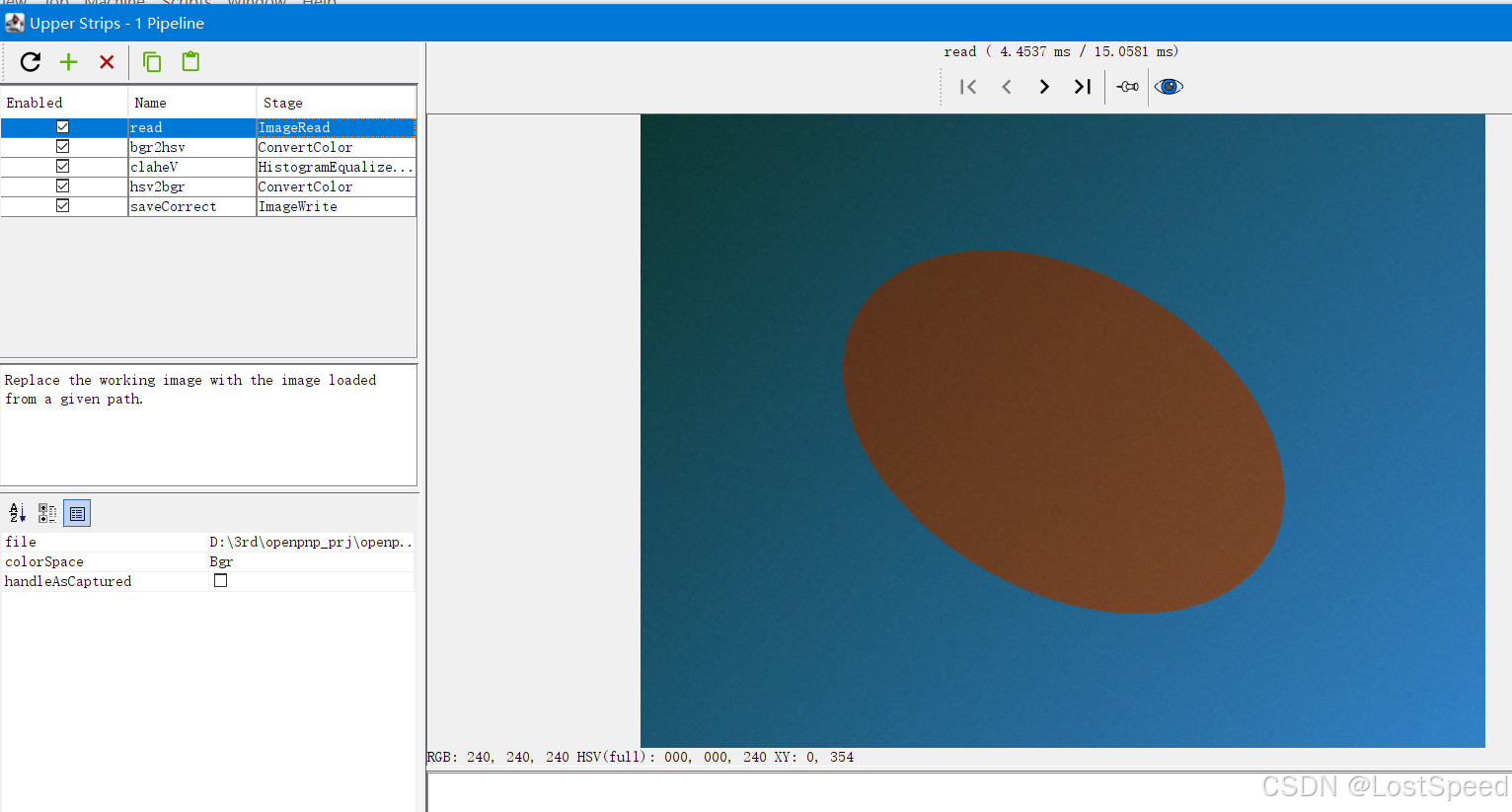
例子 - 彩色图像
import cv2
import numpy as np
def generate_color_nonuniform_image(output_path="color_nonuniform.png", size=(640, 480)):
# 创建渐变背景(BGR),亮度从左上到右下逐渐升高
bg = np.zeros((size[1], size[0], 3), dtype=np.uint8)
for y in range(size[1]):
for x in range(size[0]):
brightness = int(50 + 150 * (x + y) / (size[0] + size[1]))
# 背景色调为蓝绿色(B稍高,G中等,R低)
bg[y, x] = (brightness, brightness//2 + 30, brightness//4)
# 前景掩码:椭圆区域
fg_mask = np.zeros((size[1], size[0]), dtype=np.uint8)
center = (size[0]//2, size[1]//2)
axes = (180, 120)
angle = 30
cv2.ellipse(fg_mask, center, axes, angle, 0, 360, 255, -1)
# 前景:红色调,但亮度与背景相近(低对比度)
result = bg.copy()
mask = fg_mask > 0
# 红色通道亮度 = 背景平均亮度 * 0.9 + 30,G和B更低
bg_mean = bg[mask].mean(axis=1).astype(np.float32)
r = (bg_mean * 0.8 + 40).astype(np.uint8)
g = (bg_mean * 0.5 + 20).astype(np.uint8)
b = (bg_mean * 0.3 + 10).astype(np.uint8)
result[mask, 2] = r # R
result[mask, 1] = g # G
result[mask, 0] = b # B
# 添加轻微噪声
noise = np.random.normal(0, 4, result.shape).astype(np.int16)
result = np.clip(result.astype(np.int16) + noise, 0, 255).astype(np.uint8)
cv2.imwrite(output_path, result)
print(f"彩色非均匀光照测试图片已生成: {output_path}")
if __name__ == "__main__":
generate_color_nonuniform_image()
<cv-pipeline>
<stages>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageRead" name="read" enabled="true" file="D:\3rd\openpnp_prj\openpnp-official\openpnp-test-images\my_test\color_nonuniform.png" color-space="Bgr" handle-as-captured="false"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ConvertColor" name="bgr2hsv" enabled="true" conversion="Bgr2Hsv"/>
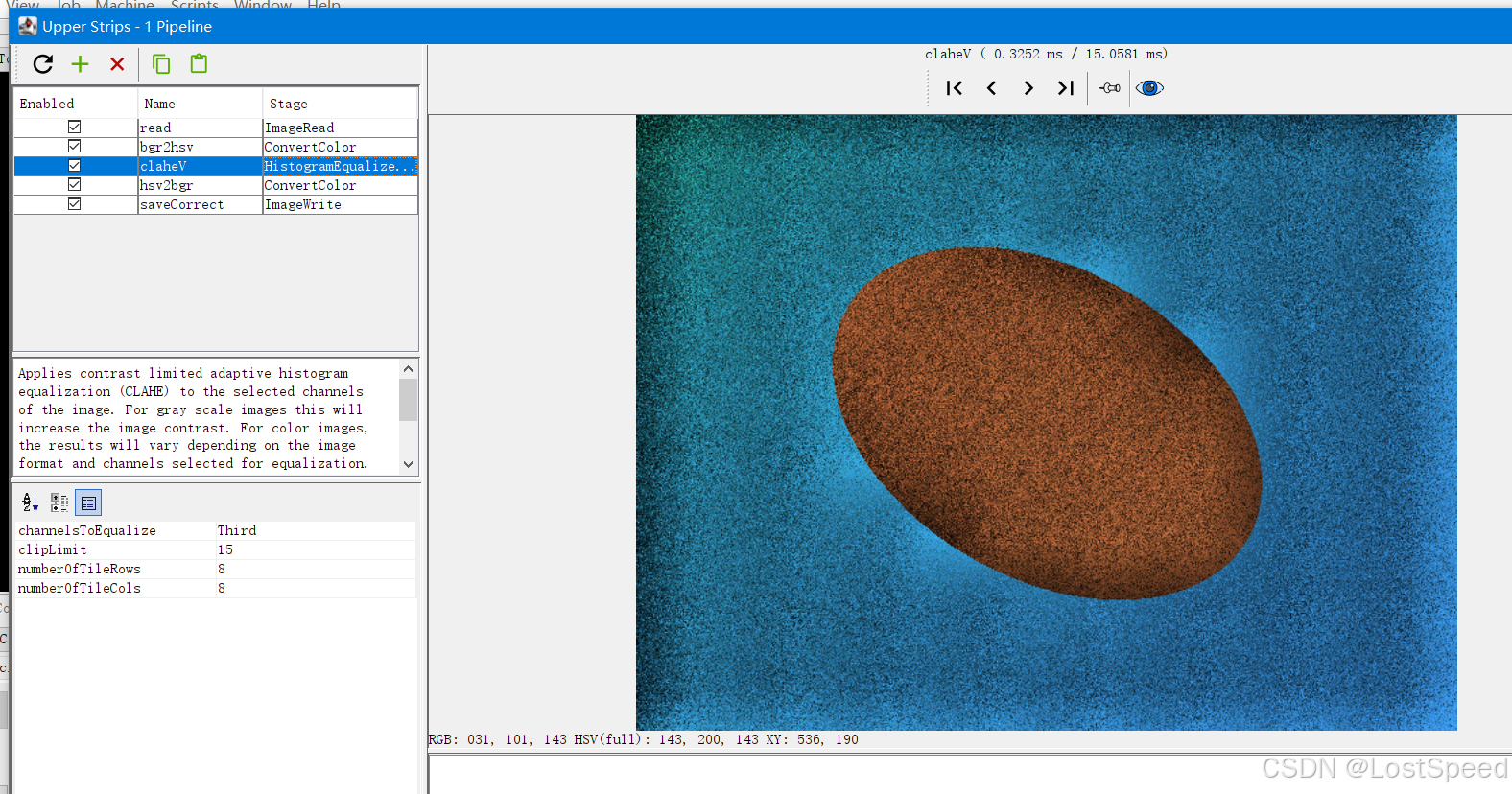
<cv-stage class="org.openpnp.vision.pipeline.stages.HistogramEqualizeAdaptive" name="claheV" enabled="true" channels-to-equalize="Third" clip-limit="15.0" number-of-tile-rows="8" number-of-tile-cols="8"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ConvertColor" name="hsv2bgr" enabled="true" conversion="Hsv2Bgr"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageWrite" name="saveCorrect" enabled="true" file="output_clahe_correct.png"/>
</stages>
</cv-pipeline>
效果
END

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)