一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱...
MCMOTORRS(定子电阻):用于代码中DQ轴电压方程计算(如vd = Rsid + LdLqiq),直接影响电流环的调节精度——若Rs配置偏小,代码计算的电压补偿量不足,可能导致电流超调;MCMOTORLD/MCMOTORLQ(直轴/交轴电感):除了动态查表调用外,静态初始值需在此定义,作为代码中弱磁控制、解耦控制的基础参数(如弱磁算法中需根据Ld/Lq差值计算最大弱磁电流);MCMOTORP
一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等) 为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)
本文基于“调试前准备2-修改电机本体参数.doc”“调试前准备1-软件安装.doc”“无位置调试要点.doc”“用户操作手册.doc”“源文件说明.doc”五份文档,聚焦永磁同步电机(PMSM)无位置矢量控制(FOC)的软件环境搭建、电机参数适配、代码功能拆解、调试核心逻辑及操作流程,从功能实现角度深入解析代码在控制流程中的作用,同时避免核心代码细节泄露。
一、软件环境搭建:为代码运行搭建基础支撑
软件安装是代码编译、仿真与调试的前提,其核心目标是构建“MATLAB仿真环境+C语言编译环境+代码编辑环境”的完整开发链条,确保后续代码能正常调用、编译与运行。
1. MATLAB与编译器安装:保障代码编译与仿真兼容性
- MATLAB 2018b及以上版本安装:作为无位置FOC算法的仿真载体,MATLAB需支持Simulink模型搭建与S函数调用——后续代码(尤其是核心控制逻辑)需通过S函数接口嵌入Simulink模型,实现“代码逻辑+电机模型”的联合仿真。文档明确要求安装破解版(需自行参考网络教程),其核心功能诉求是提供Simulink电机库、信号观测工具(如示波器模块)及MEX编译命令,为代码与模型的联动提供平台支持。
- MinGW-w64 C/C++编译器安装:这是C语言代码编译的关键工具。由于高版本MATLAB对Visual Studio编译库兼容性较差,文档推荐采用MATLAB自带的MinGW-w64编译器,安装流程需通过“附加功能-获取附加功能”搜索下载,且需保持网络稳定(因资源来自国外服务器,可能需多次尝试)。其功能定位是将C语言编写的控制算法代码(如无位置观测、PI调节逻辑)编译为MATLAB可识别的.mexw64文件,确保代码能被Simulink模型调用,避免因编译器不兼容导致代码无法运行。
2. 代码编辑工具安装:提升代码修改与维护效率
文档推荐安装Visual Studio 2012或Notepad++,核心原因是无位置FOC工程基于Visual Studio 2012创建,使用该工具可直接打开工程文件(如.vcxproj),方便代码的批量编辑、查找与注释。从功能角度看,这类工具能提供语法高亮、函数跳转、代码折叠等功能,降低后续“修改电机参数”“调整PI参数”时的操作复杂度——例如在修改FOC_MotorParaCal.h中的电机本体参数时,Visual Studio的“查找替换”功能可快速定位参数定义位置,避免手动查找导致的效率低下或错误。
二、电机参数适配:让代码匹配实际电机特性
MATLAB自带电机模型存在“Ld/Lq固定不变”的局限性,而实际永磁同步电机因磁路饱和特性,Ld/Lq会随定子电流变化,若不修改参数,代码计算的扭矩、控制精度会出现偏差。因此,“修改电机本体参数”的核心功能是通过调整代码与模型的参数接口,让控制算法能调用实际电机的动态电感特性,提升控制准确性。
1. 电机库模型修改:重构参数调用逻辑
文档详细描述了修改MATLAB电机库模块的步骤(从“Look under Mask”到“GO To library Block”),最终需针对6个核心电机模块(连续/离散域电机模型、转矩/转速模式)进行参数接口重构,其功能本质是:
- 替换固定电感为外部查表接口:原始模型中Ld/Lq为固定数值,修改后代码可通过外部查表(根据定子电流实时读取对应Ld/Lq值)更新电感参数,确保电压方程、转矩方程的计算基于实际电机特性。例如在离散域永磁同步电机模型(模块2)中,需将Uq电压方程中的“固定Motor_Lq”替换为“外部输入的动态Lq值”,代码层面则需新增电感查表函数的调用逻辑,实现“电流→电感”的实时映射。
- 统一参数调用入口:修改后电机模型的Rs(定子电阻)、Phi(磁链)、Pole(极对数)等参数,均从FOC_MotorParaCal.h头文件中读取,而非模型内部固定定义。这一设计的功能优势是“参数集中管理”——后续更换电机时,只需修改头文件中的宏定义,无需重新调整模型,降低代码与模型的耦合度。
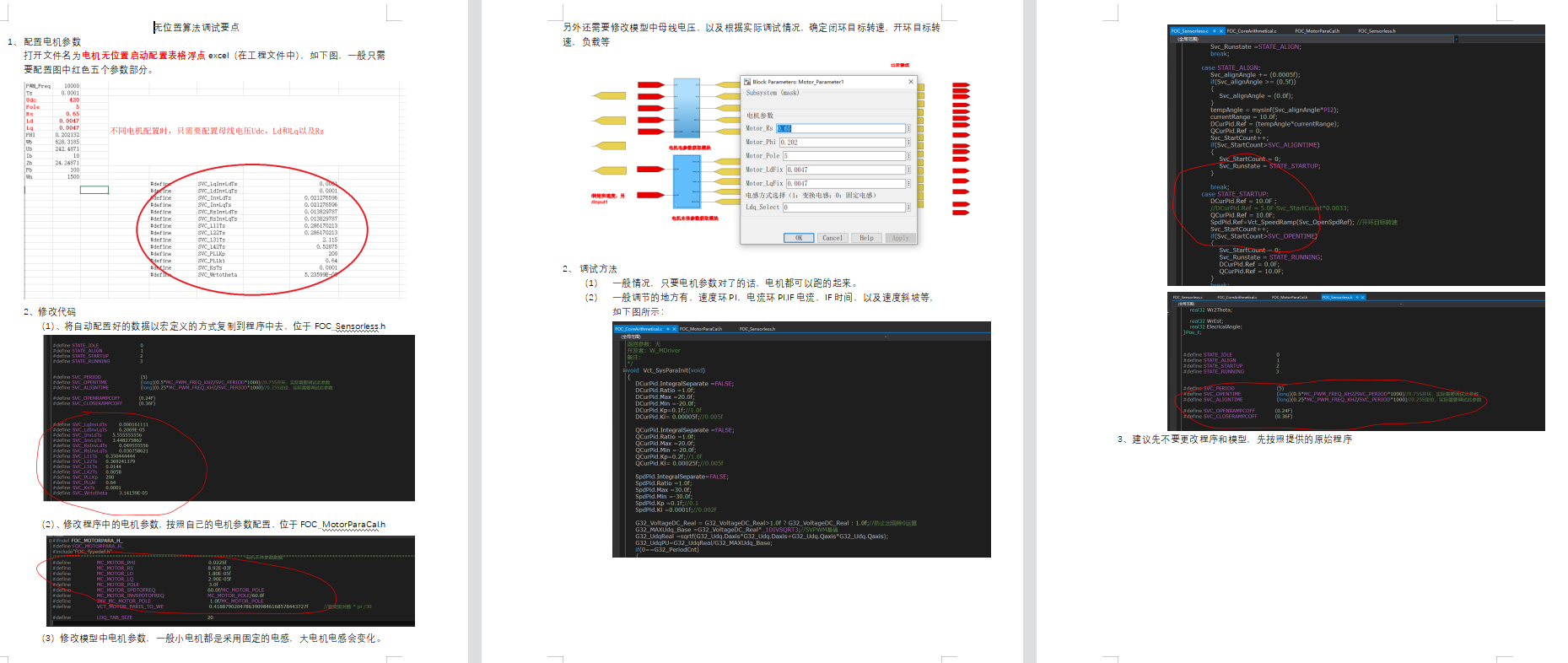
2. 代码参数配置:定义电机核心特性
在无位置FOC代码体系中,电机本体参数通过FOC_MotorParaCal.h头文件以宏定义形式存储,文档明确需配置5个核心参数,其功能作用如下:
- MCMOTORRS(定子电阻):用于代码中DQ轴电压方程计算(如vd = Rsid + Lddid/dt + weLqiq),直接影响电流环的调节精度——若Rs配置偏小,代码计算的电压补偿量不足,可能导致电流超调;
- MCMOTORLD/MCMOTORLQ(直轴/交轴电感):除了动态查表调用外,静态初始值需在此定义,作为代码中弱磁控制、解耦控制的基础参数(如弱磁算法中需根据Ld/Lq差值计算最大弱磁电流);
- MCMOTORPHI(永磁体磁链):是转矩方程(Te = 1.5Pole(Phiiq + (Ld-Lq)id*iq))的关键变量,直接决定代码计算的输出扭矩准确性,若Phi配置错误,可能导致实际扭矩与目标扭矩偏差过大;
- MCMOTORPOLE(极对数):用于代码中“机械转速→电角度”的转换(电角度 = 机械角度*Pole),同时影响运动方程中转速环的调节系数,是无位置观测器(如PLL锁相环)计算电角速度的核心参数。
三、代码功能拆解:解析无位置FOC的核心逻辑
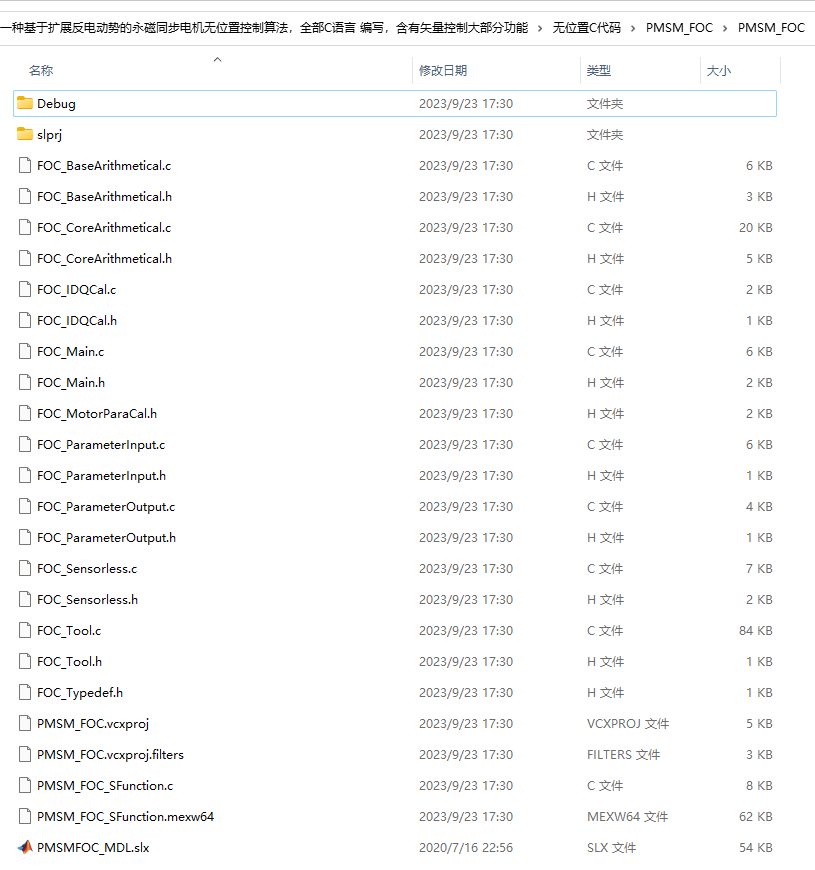
基于“源文件说明.doc”对.c/.h文件的定义,无位置FOC代码体系可分为6大功能模块,各模块通过函数调用与参数传递协同工作,实现“电流采集→算法计算→PWM输出”的完整控制流程。
1. 基础算法模块(FOC_BaseArithmetical.c/.h):提供数学计算支撑
该模块是控制算法的“工具库”,核心功能是实现矢量控制所需的基础数学运算,代码中包含以下关键函数(功能描述而非具体实现):
- 坐标变换函数:实现Clark变换(三相电流→两相静止电流)与Park变换(两相静止电流→两相旋转电流),将采样的三相电流(IA、IB、IC)转换为DQ轴电流(id、iq),为后续电流环调节提供输入;
- PI调节函数:包含位置式PI与增量式PI两种算法,支持积分分离、输出限幅功能,代码中电流环(DCurPid、QCurPid)与转速环(SpdPid)的调节均依赖此函数——例如电流环PI函数需根据“目标电流-反馈电流”的偏差,计算出DQ轴目标电压;
- 滤波函数:提供一阶低通滤波、滑动平均滤波等算法,用于处理采样的电流、电压信号(如对AD采集的相电流进行滤波,避免高频噪声导致代码计算的电流反馈值波动)。
2. 核心控制模块(FOC_CoreArithmetical.c/.h):实现矢量控制核心逻辑
该模块是无位置FOC的“大脑”,代码功能覆盖从电流调节到PWM输出的全流程,关键逻辑包括:
- DQ轴解耦控制:由于DQ轴电流存在交叉耦合(如weLqiq对vd的影响),代码需计算耦合补偿电压并叠加到PI输出的目标电压中,确保id、iq的调节互不干扰,提升电流环动态响应速度;
- 弱磁控制:当电机转速超过额定转速时,代码通过计算弱磁电流(id负值),利用Ld与Lq的差值抵消部分反电动势,实现转速的进一步提升,核心是根据母线电压、当前转速动态调整id的目标值;
- SVPWM调制:将DQ轴目标电压转换为三相PWM占空比(G32CMPA、G32CMPB、G32_CMPC),代码需实现“电压矢量扇区判断→作用时间计算→PWM波生成”的逻辑,最终输出到IGBT驱动模块。
3. 无位置观测模块(FOC_Sensorless.c/.h):实现无传感器控制
该模块是“无位置”功能的核心,代码通过状态机与观测器算法,实现电机从启动到稳定运行的全程无传感器控制,功能拆解如下:
- 状态机控制:定义4个运行状态(STATEIDLE空闲、STATEALIGN定位、STATESTARTUP开环、STATERUNNING闭环),代码根据时间或转速条件切换状态——例如启动阶段先进入定位状态(给定向子绕组通直流电,使转子定位到指定角度),再进入开环状态(按固定转速斜坡升速),最后切换到闭环状态(由观测器反馈电角度);
- 观测器算法:基于扩展反电动势或电流模型估算转子电角度,代码需实时采集DQ轴电流、电压,通过观测器方程计算反电动势,再结合PLL锁相环跟踪电角度,确保无位置状态下的转速与角度精度;
- 启动参数配置:通过宏定义设置定位时间(SVCALIGNTIME)、开环时间(SVCOPENTIME)、转速斜坡系数(SVCOPENRAMPCOFF)等,代码根据这些参数控制启动过程的平稳性——例如SVCALIGNTIME过短可能导致转子定位不准,启动时出现抖动。
4. 流程调度模块(FOC_Main.c/.h):统筹控制流程
该模块是代码的“总调度器”,main函数在此定义,核心功能是按采样周期(通常为0.1ms或0.2ms)调用各模块函数,形成闭环控制:
- 初始化函数(Vct_SysParaInit):在代码启动时初始化PI参数(如设置Kp、Ki、输出限幅)、观测器参数、全局变量(如电流反馈值、电压目标值),确保各模块处于初始工作状态;
- 周期调度逻辑:每个采样周期内,代码依次执行“电流采集→坐标变换→无位置观测→电流环调节→弱磁控制→SVPWM调制”流程,例如先调用FOCIDQCal.c中的函数获取id、iq反馈值,再调用FOCCoreArithmetical.c中的PI函数计算目标电压,最后输出PWM信号;
- 故障保护接口:预留过流、过压、过温等故障检测的函数调用入口,代码可根据采集的电流、电压信号判断故障状态,若触发故障则立即关闭PWM输出,保障电机与驱动安全。
5. 输入输出模块(FOC_ParameterInput.c/.h、FOC_ParameterOutput.c/.h):实现参数交互
- 输入模块功能:读取外部配置参数(如通过Excel表格生成的无位置算法系数),并将其赋值给代码中的全局变量——例如将SVCPLLKp(PLL比例系数)、SVCPLLki(PLL积分系数)从输入参数表读取到内存,供无位置观测器使用;
- 输出模块功能:采集代码运行过程中的关键参数(如id/iq反馈值、转速、扭矩、母线电压),并通过Simulink观测窗口或串口输出,用于调试时的状态监控——例如将G32UdqPU(电压利用率)、G32TorFilter(滤波后扭矩)输出到调试窗口,帮助工程师判断代码运行是否正常。
6. 工具模块(FOC_Tool.c/.h):提供辅助功能
该模块包含代码运行所需的辅助工具函数,核心功能包括:
- 正余弦查表函数:由于嵌入式环境中三角函数计算效率低,代码通过预定义的正余弦表,实现“角度→正弦/余弦值”的快速查找,用于Park变换与逆变换;
- 线性插值函数:在动态电感查表、弱磁电流计算中,需根据当前电流值(如id=5A)在离散的参数表(如id=4A对应Ld=0.004H,id=6A对应Ld=0.0038H)中插值得到精确电感值,提升代码计算精度;
- 数据类型定义:通过typedef定义real32(32位浮点数)、complexDQAxis(DQ轴复向量结构体)等自定义数据类型,统一代码中的数据格式,避免因数据类型不匹配导致的计算错误。
四、无位置调试要点:确保代码与电机稳定运行
调试的核心目标是通过调整代码参数,解决“启动抖动”“电流超调”“转速波动”等问题,文档明确的调试要点可从“参数配置”“控制环调节”“启动逻辑优化”三个维度解析其功能作用。
1. 无位置算法参数配置:优化观测精度
通过Excel配置表格生成无位置算法的关键系数(如SVCLqInvLdTs、SVCPLLKp),并以宏定义形式写入FOC_Sensorless.h,这些参数的功能影响如下:
- 观测器系数(如SVC_LdInvLqTs):用于代码中反电动势观测器的增益调节,若系数过大,观测器对电流噪声敏感,电角度估算波动大;若系数过小,观测器响应速度慢,可能导致转速跟踪滞后;
- PLL参数(SVCPLLKp、SVCPLLki):PLL锁相环用于跟踪估算的电角度,Kp影响跟踪速度,Ki影响静态误差——代码中若PLLKp过小,转速突变时电角度跟踪不及时;Ki过小,可能存在静态角度偏差,导致转矩波动。
2. 控制环PI参数调节:提升动态响应
代码中电流环与转速环的PI参数(Kp、Ki)定义在FOC_CoreArithmetical.c的初始化函数中,调试时需根据电机运行状态调整,其功能优化目标如下:
- 电流环PI(DCurPid、QCurPid):需保证电流响应快速且无超调——例如Q轴电流环(控制转矩)Kp过大,可能导致启动时电流冲击;Ki过大,可能导致电流稳态误差小但动态响应慢,代码中需通过“逐步增大Kp至出现超调,再减小并增加Ki”的方式调试;
- 转速环PI(SpdPid):需实现转速的平稳跟踪,且抗负载扰动能力强——若Kp过小,转速响应慢;Ki过小,负载增加时转速跌落明显,代码中需结合实际负载情况调整,确保转速波动在允许范围内。
3. 启动逻辑参数优化:保障启动平稳性
代码中启动阶段的关键参数(定位电流、开环时间、转速斜坡)需通过调试适配电机,功能作用如下:
- 定位电流(DCurPid.Ref在STATE_ALIGN状态下的值):需足够大以确保转子定位到指定角度,但过大可能导致电机抖动或电流超调,代码中通常设置为额定电流的50%-80%;
- 开环时间(SVC_OPENTIME):开环阶段需持续至电机转速达到观测器稳定跟踪的阈值,若时间过短,观测器未稳定就切换闭环,可能导致转速跳变;若时间过长,启动效率低,代码中需根据电机额定转速调整(如额定转速1000rpm的电机,开环时间通常设为0.5-1s);
- 转速斜坡系数(SVC_OPENRAMPCOFF):控制开环阶段转速的上升速率,系数过小,启动缓慢;系数过大,转速上升过快可能导致电流超调,代码中需通过观测相电流波形(无明显尖峰)调整。
五、用户操作流程:实现代码与模型的联合仿真
操作流程的核心是“配置环境→编译代码→运行模型→观测结果”,每个步骤均为了确保代码能正常嵌入Simulink模型并实现仿真验证,功能逻辑如下:
1. 环境配置:定位代码与模型路径
打开MATLAB后,需将工程文件夹(包含.c/.h文件、.slx模型)设置为当前工作目录,功能作用是:
- 确保MATLAB能找到代码文件,避免编译时出现“文件未找到”错误;
- 确保Simulink模型(PMSMFOC_MDL.slx)能调用编译后的.mexw64文件,实现“模型信号输入→代码计算→模型信号输出”的闭环。
2. 代码编译:生成仿真可执行文件
在MATLAB命令行输入“mex PMSMFOCSFunction.c”,编译核心代码文件,其功能是:
- 将C语言编写的无位置FOC算法(包含各模块函数)编译为MATLAB可识别的动态链接库(.mexw64),使Simulink模型能通过S函数模块调用代码逻辑;
- 编译过程中会检查代码语法错误(如函数未定义、参数类型不匹配),若出现“找不到MinGW-w64”错误,需重新安装编译器,确保代码编译通过。
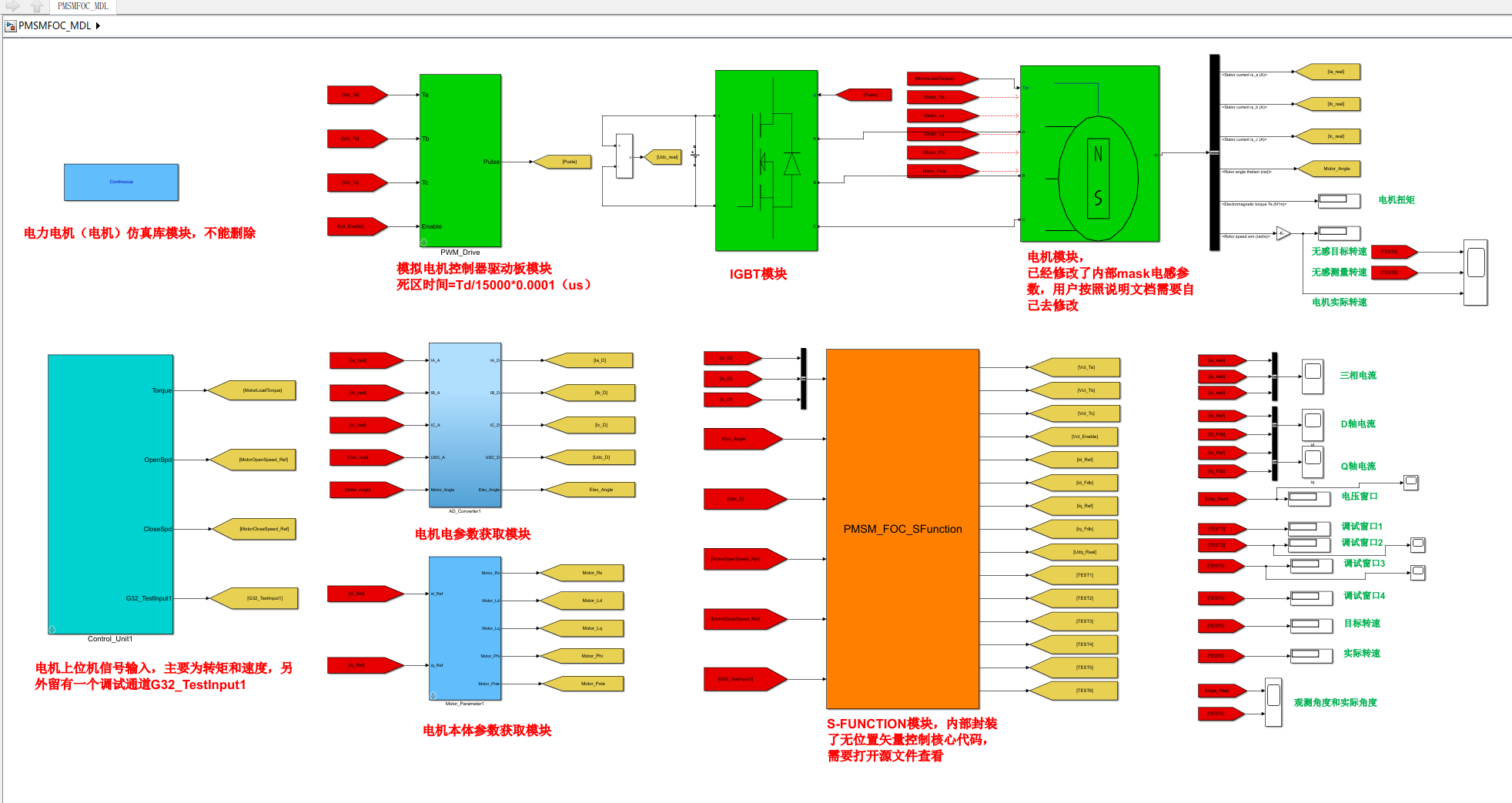
3. 模型运行与观测:验证代码功能
打开PMSMFOC_MDL.slx模型并运行仿真,模型中包含“电机本体模块”“PWM驱动模块”“信号观测窗口”,其功能是:
- 信号输入:模型向代码输入三相电流AD值、母线电压AD值等采样信号,模拟实际硬件的信号采集;
- 代码计算:S函数模块调用编译后的代码,执行无位置FOC算法,输出PWM比较值(控制IGBT开关)与关键状态参数(如id/iq反馈值、转速);
- 结果观测:通过模型中的示波器模块查看相电流波形(应接近正弦波,无明显畸变)、id/iq跟随曲线(反馈值应快速跟踪目标值),验证代码控制效果——若电流波形畸变,需检查坐标变换或SVPWM代码逻辑;若id/iq跟随滞后,需优化电流环PI参数。
六、总结:代码功能与工程应用的关联
无位置FOC代码的核心价值是“通过算法实现电机的无传感器精准控制”,从软件安装到调试运行的全流程,均围绕“代码适配电机特性”“代码保障控制精度”“代码简化工程应用”三个目标展开:
- 适配性:通过修改电机库模型与代码参数,使同一套代码能适配不同规格的永磁同步电机,降低工程移植成本;
- 精度:无位置观测器、解耦控制、弱磁控制等代码逻辑,确保电机在无传感器情况下仍能实现高精度的转速与扭矩控制;
- 易用性:参数集中管理(如FOC_MotorParaCal.h)、模块化代码设计(如基础算法与核心控制分离),使工程师无需深入理解代码细节,即可通过调整参数实现电机调试,提升工程效率。
同时,文档反复强调“新用户优先使用原始代码验证功能,熟悉后再修改”,其核心考量是避免因代码逻辑修改错误导致电机失控,体现了“安全优先、逐步优化”的工程设计思路。

一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等) 为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)


腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 26
26 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)