90%以上准确率!揭秘中山大学团队如何用YOLOv8“看清”每一道裂缝
道路病害(裂缝与坑槽)的自动化检测是智能交通与基础设施维护的核心难题。传统人工巡检效率低、主观性强,难以满足大规模路网需求。近年来,基于深度学习的视觉方法成为主流,但仍面临复杂背景干扰、小目标识别难、实时性要求高等挑战。本次解析的两篇论文分别从与两个方向探索解决方案:第一篇基于改进YOLOv8,引入ECA与CBAM双重注意力模块,显著提升裂缝分割精度;第二篇依托SHREC 2022国际竞赛,系统对
道路病害(裂缝与坑槽)的自动化检测是智能交通与基础设施维护的核心难题。传统人工巡检效率低、主观性强,难以满足大规模路网需求。近年来,基于深度学习的视觉方法成为主流,但仍面临复杂背景干扰、小目标识别难、实时性要求高等挑战。
本次解析的两篇论文分别从注意力机制增强与多模态数据融合两个方向探索解决方案:第一篇基于改进YOLOv8,引入ECA与CBAM双重注意力模块,显著提升裂缝分割精度;第二篇依托SHREC 2022国际竞赛,系统对比多种深度学习模型在RGB-D数据上的路面病害分割性能,揭示了深度信息未被充分利用的现状与潜力。
我整理了2026路面病害检测论文创新点归纳与写作模板:从YOLOv8改进到多模态分割,感兴趣的dd哦~
一、ICAACE 2025: Intelligent road crack detection and analysis based on improved YOLOv8
方法:
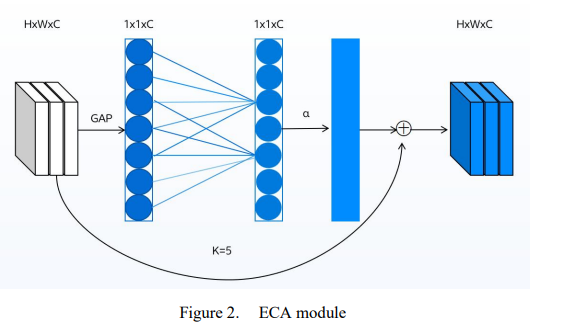
本文基于YOLOv8框架构建路面裂缝检测与分割模型。首先收集4029张道路裂缝图像并逐像素标注;然后在YOLOv8骨干网络中依次集成ECA(高效通道注意力) 与CBAM(卷积块注意力模块) 两种注意力机制,增强模型对裂缝区域的特征响应;最后对分割区域进行后处理分析,计算裂缝的最大/最小宽度及位置。
创新点:
-
注意力机制融合:首次将ECA与CBAM同时引入YOLOv8,ECA通过一维卷积实现轻量级通道交互,CBAM则从通道与空间两个维度联合增强特征表达,二者互补提升了模型对细小裂缝的敏感度。
-
性能显著提升:消融实验表明,ECA+CBAM组合使召回率(Recall) 达到89.47%,精确率(Precision) 达92.25%,准确率(Accuracy) 达91.34%,相较于原生YOLOv8分别提升约11%、11.4%和11.5%。
-
裂缝量化分析:模型不仅能分割裂缝区域,还能自动计算裂缝的几何参数(最大/最小宽度及位置),为道路养护提供定量依据。
-
论文链接:https://arxiv.org/abs/2504.13208
二、SHREC 2022: pothole and crack detection in the road pavement using images and RGB-D data
方法:
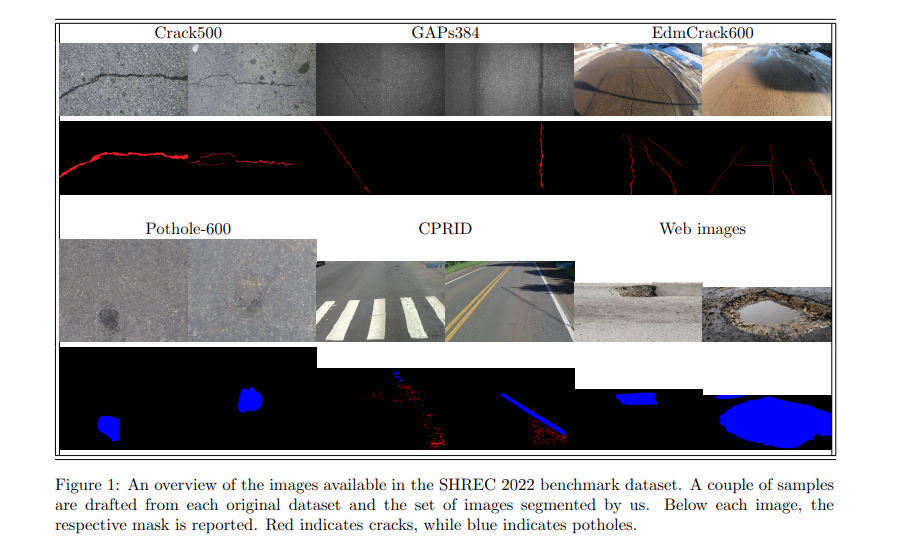
本文为SHREC 2022国际竞赛的技术综述,聚焦路面坑槽与裂缝的语义分割。组织方提供包含4340张图像/掩膜对(涵盖Crack500、GAPs384、EdmCrack600等5个公开数据集)及797段RGB-D视频片段。
参赛团队提交了6种深度学习模型(含UNet++、MANet、DeepLabV3+、SegFormer等),并引入主动轮廓损失函数与掩膜软交叉伪监督等策略。所有方法在统一环境下评估,指标包括加权像素精度(WPA)、Dice多类系数及平均交并比(mIoU)。
创新点:
-
多源异构数据集:首次将5个公开道路病害数据集与自采RGB-D视频整合为统一基准(总计4340张标注图像+797段视频),涵盖不同分辨率、拍摄视角与路面条件。
-
主动轮廓损失函数:PUCP团队将Chan-Vese能量泛函与交叉熵损失结合(损失函数公式如下),利用水平集方法引入全局空间信息,提升了分割边界的几何准确性。
其中基于演化曲线内外区域像素强度差异构建。
-
掩膜软交叉伪监督:HCMUS团队提出半监督学习框架,利用无标注视频帧生成软伪标签并掩膜背景通道,结合双网络协同训练(DeepLabV3+与UNet++),显著提升了模型在域外数据(如宽视角视频)上的泛化能力。
-
关键发现:所有参赛方法均未利用视差图(深度信息),仅HCMUS以无监督方式使用了RGB视频帧。评测指出,深色阴影与路面真实坑槽在RGB图像上易混淆,深度信息有望成为未来突破方向。
-
论文链接:https://arxiv.org/pdf/2205.13326

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 6
6 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)