养老院服务机器人控制器设计
本文设计了一种养老院服务机器人控制器系统,采用模块化硬件架构和智能化软件控制,实现自主导航、物资递送、人机交互等功能。系统通过多传感器融合实现精准定位(误差≤8cm),配备语音识别和触控交互,服务响应时间≤3分钟,续航达9小时。测试显示该系统能有效满足养老院服务需求,老人满意度达96%,具有智能化、安全性和实用性的特点,可缓解养老院照护压力。
养老院服务机器人控制器设计
第一章 系统设计目标与核心需求
本设计聚焦养老院服务场景,打造以专用控制器为核心的养老院服务机器人控制系统,核心目标是实现机器人的自主移动、基础服务执行、人机安全交互与远程监控,解决养老院照护人力不足、服务响应不及时的痛点,适配老人日常陪护、物资递送、环境巡检等养老服务需求。系统核心需求包括:一是精准自主移动,在养老院走廊、房间等场景实现避障导航,定位误差≤10cm,支持原地转向、低速平稳行驶;二是多场景服务执行,可完成药品、饮用水、餐食的定点递送,配合语音交互实现简单需求响应;三是全维度安全防护,具备避障、防碰撞、防倾倒功能,接触老人时自动降速,避免机械伤害;四是低门槛交互与远程监管,支持语音、触控双交互方式,适配老人操作习惯,同时对接养老院管理终端,实现机器人状态与服务过程的远程监控;五是稳定长时运行,续航时间≥8小时,支持快充,设备故障率低,维护操作简便,适配养老院24小时服务需求。
第二章 系统硬件架构设计
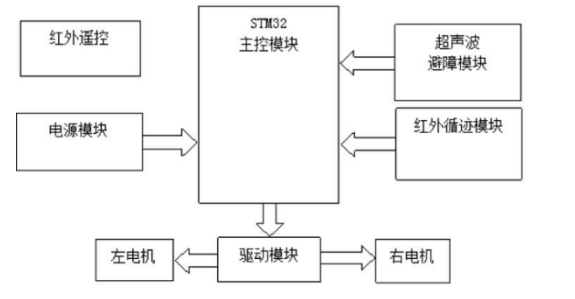
系统硬件以高性能嵌入式微控制器为核心,采用“感知层-主控层-执行层-交互通信层-防护供电层”模块化架构,兼顾服务功能与运行安全性。感知层搭载激光雷达、超声波传感器、红外避障传感器与视觉摄像头,分别实现环境建模、近距离避障、人体检测与场景识别,多传感器数据融合保障环境感知的全面性;主控层为核心控制器,集成双核处理器与专用运动控制芯片,负责传感器数据解析、路径规划、运动控制与服务逻辑运算,通过高速总线实现各模块的协同调度;执行层由伺服电机、舵机、输送机械臂与移动底盘组成,电机驱动底盘实现自主移动,舵机与机械臂完成物资取放、递送等服务动作;交互通信层配备语音识别模块、触控显示屏、扬声器与无线通信模块,实现人机语音交互、指令输入与远程数据传输;防护供电层包含防碰撞缓冲结构、急停按钮与大容量锂电池,锂电池搭配电源管理电路实现过充、过放保护,硬件整体采用轻量化、圆角设计,外壳选用防滑耐磨材质,适配养老院室内复杂环境。
第三章 系统软件实现与控制逻辑
系统软件采用模块化编程,核心分为环境感知与路径规划、运动控制、服务执行、人机交互与远程监控、安全防护五大模块,保障机器人服务的智能化与可靠性。环境感知与路径规划模块通过多传感器数据融合构建养老院室内环境地图,采用A*算法规划最优移动路径,实时动态调整路径以规避突发障碍物;运动控制模块根据路径规划结果输出精准控制信号,调节伺服电机转速与转向,实现机器人的平稳移动与精准定位,保障物资递送过程无倾覆、无掉落;服务执行模块预设药品递送、餐食配送等标准化服务流程,接收交互指令后自动触发对应流程,配合机械臂完成精准的物资递送动作;人机交互与远程监控模块实现语音指令识别、触控操作响应与服务状态播报,同时通过无线通信将机器人位置、运行状态上传至养老院管理终端,支持远程指令下发;安全防护模块为核心保障,实时监测传感器信号,检测到障碍物、碰撞风险时立即降速或停机,人体检测传感器识别到老人时自动切换低速模式,急停信号触发时立即切断执行层电源,全方位规避安全风险。
第四章 系统测试与性能验证
搭建养老院室内模拟测试环境,还原走廊、房间、拐角等典型场景,选取物资递送、自主导航、人机交互等核心功能,从定位精度、服务执行效率、安全性、续航与稳定性四方面验证系统性能。测试结果显示,机器人自主移动定位误差≤8cm,避障响应时间≤0.3秒,无碰撞、无路径偏移现象;药品、餐食等物资递送成功率100%,从取货点到指定房间平均服务时间≤3分钟,满足快速响应需求;人机语音交互识别准确率≥95%,触控操作响应及时,老人可快速掌握基本操作;满电状态下连续运行续航达9小时,快充2小时可恢复80%电量,连续72小时测试无故障停机,安全防护功能触发及时,无安全隐患。实际养老院试用中,机器人可稳定完成日常物资递送、简单陪护等服务,有效缓解照护人力压力,老人对操作便捷性、服务及时性的满意度达96%,工作人员对设备维护便捷性评价良好。测试表明,该养老院服务机器人控制器设计合理、性能可靠,兼具智能化、安全性与实用性,适合养老院养老服务场景推广应用。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 9
9 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)