FRABA绝对旋转式编码器EDS配置文件详解
绝对旋转式编码器(Absolute Rotary Encoder)是一种用于检测旋转轴角度位置的高精度传感装置。与增量式编码器不同,它在每次上电时无需回零即可直接读取当前位置,具备断电保持位置信息的能力。其核心优势在于提供唯一且确定的角度值,避免了增量式编码器因断电或信号丢失导致的位置误判问题。EDS(Electronic Data Sheet)文件是一种标准化的配置描述文件,广泛用于CANope

简介:FRABA绝对旋转式编码器在工业自动化中用于精准测量旋转位置、速度和角加速度。其配套的EDS文件(电子数据表)用于定义设备通信参数,确保编码器与控制系统(如PLC)之间的稳定交互。本资料包含多个EDS配置文件,分别适用于不同型号和应用场景,如MCD和MPF系列的标准(ST)与电机(MT)版本,以及专用于升降设备的CA_LiftProfile配置。通过合理选用EDS文件,工程师可高效集成编码器至自动化系统,实现高精度运动控制和系统诊断,助力智能制造和工业4.0应用。 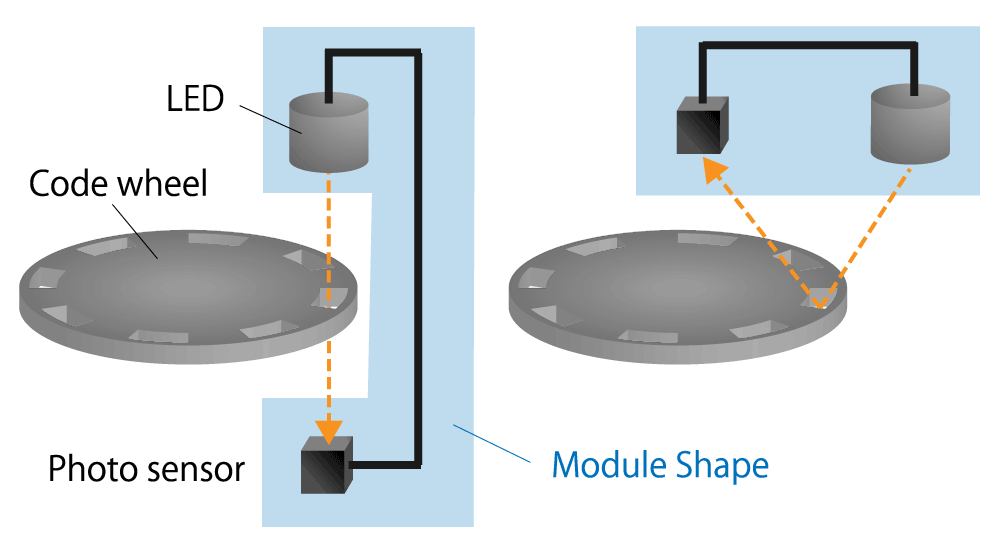
1. 绝对旋转式编码器基础原理
1.1 什么是绝对旋转式编码器
绝对旋转式编码器(Absolute Rotary Encoder)是一种用于检测旋转轴角度位置的高精度传感装置。与增量式编码器不同,它在每次上电时无需回零即可直接读取当前位置,具备断电保持位置信息的能力。其核心优势在于提供唯一且确定的角度值,避免了增量式编码器因断电或信号丢失导致的位置误判问题。
1.2 工作原理与内部结构
绝对旋转式编码器主要由码盘(光学或磁性)、读取传感器(光电或磁感应)以及信号处理电路组成。码盘上刻有特定编码图案(如二进制、格雷码等),传感器根据码盘旋转时图案的变化读取对应角度值。
其工作流程如下:
graph TD
A[旋转轴带动码盘转动] --> B{传感器读取码盘图案}
B --> C[将图案转换为电信号]
C --> D[信号处理器解析为角度值]
D --> E[输出数字信号或总线通信数据]
1.3 输出信号类型与通信协议
绝对旋转式编码器支持多种输出方式,常见类型包括:
| 输出类型 | 说明 |
|---|---|
| SSI(同步串行接口) | 高精度、点对点通信,适用于长距离传输 |
| CANopen | 工业现场总线协议,支持多节点组网 |
| EtherCAT | 实时以太网协议,适用于高速运动控制 |
这些通信方式决定了编码器如何与PLC、伺服驱动器或上位机进行数据交互,后续章节将深入解析其与EDS文件的配合使用。
2. EDS文件作用与结构解析
2.1 EDS文件在工业通信中的地位
2.1.1 什么是EDS文件
EDS(Electronic Data Sheet)文件是一种标准化的配置描述文件,广泛用于CANopen总线通信协议中。它以INI格式组织,用于描述设备的功能、通信参数、对象字典、PDO(Process Data Object)映射等关键信息。通过EDS文件,主站设备(如PLC)可以自动识别并配置从站设备(如编码器、伺服驱动器等),从而实现快速、可靠的通信连接。
EDS文件本质上是一个文本文件,包含多个节(Section),每个节对应设备的一个功能模块或通信参数集合。例如:
[FileInfo]
FileName=MPF_Encoder.eds
FileVersion=1.0
FileRevision=1
该节描述了文件的基本信息,包括文件名、版本和修订号。这种结构化的信息组织方式使得设备厂商、系统集成商以及最终用户能够快速理解设备的通信能力,并进行相应的配置。
2.1.2 EDS文件在CANopen网络中的角色
在CANopen网络中,EDS文件扮演着“设备驱动程序”的角色。它为设备的通信接口提供了一个标准化的描述方式,使得不同厂商的设备可以在同一网络中互操作。EDS文件的核心作用包括:
- 设备识别 :通过节点ID和设备类型信息,主站可以识别从站设备的身份。
- 通信配置 :定义了设备支持的通信参数,如波特率、PDO映射、对象字典结构等。
- 参数匹配 :确保主站与从站之间的数据交换格式一致,避免因参数不匹配导致的通信故障。
- 自动配置 :现代PLC或总线主站支持自动加载EDS文件,实现设备即插即用。
下图展示了EDS文件在CANopen系统中的典型应用流程:
graph TD
A[设备上电] --> B[主站检测到新节点]
B --> C[读取节点ID]
C --> D[加载对应EDS文件]
D --> E[自动配置通信参数]
E --> F[建立PDO映射]
F --> G[数据交换开始]
这种流程确保了设备在复杂工业网络中能够被快速识别和集成,从而提高系统的灵活性和可维护性。
2.2 EDS文件的结构组成
2.2.1 文件头与厂商信息
EDS文件的开头部分通常包含文件的基本信息和厂商描述。例如:
[FileInfo]
FileName=MPF_Encoder.eds
FileVersion=1.0
FileRevision=1
[DeviceInfo]
VendorName=Beckhoff
VendorNumber=271
ProductName=MPF Absolute Encoder
ProductNumber=123456
这些信息帮助系统集成商识别设备的来源、型号和版本。在实际应用中,厂商编号(VendorNumber)是CANopen网络中设备识别的关键字段,必须与实际设备的出厂设定一致。
逻辑分析 :
- VendorName :设备制造商名称,便于识别。
- VendorNumber :由CiA(CAN in Automation)分配的厂商ID,必须唯一。
- ProductName :产品名称,用于用户界面显示。
- ProductNumber :产品型号编号,有助于设备替换与维护。
2.2.2 对象字典与节点参数定义
对象字典(Object Dictionary)是CANopen设备的核心数据结构,它以16位索引(Index)和8位子索引(Subindex)的方式组织数据。EDS文件中的 [Objects] 节用于定义这些对象:
[Objects]
0x1000=0x00000001, 32, ro
0x1001=0x00, 8, ro
0x1018=4, ro
0x1018sub0=4
0x1018sub1=0x027104A8
0x1018sub2=0x00000000
0x1018sub3=0x00000000
参数说明 :
- 0x1000 :代表设备类型(Device Type),通常为32位只读常量。
- 0x1001 :错误寄存器(Error Register),反映设备当前的错误状态。
- 0x1018 :厂商特定信息(Identity Object),用于设备唯一识别。
- sub0~sub3 :子索引字段,分别代表子索引数量、厂商ID、产品代码等。
代码逻辑分析 :
- 每一行定义了一个对象,格式为 Index=Value, Length, Access 。
- Value :对象的默认值。
- Length :对象的数据长度(位数)。
- Access :访问权限(ro=只读,wo=只写,rw=读写)。
2.2.3 通信参数与PDO映射
通信参数定义了设备在CANopen网络中的行为方式,包括波特率、节点ID、PDO映射等。例如:
[CommunicationProfile]
BaudRate_10=1
BaudRate_20=1
BaudRate_50=1
BaudRate_125=1
BaudRate_250=1
BaudRate_500=1
BaudRate_800=1
BaudRate_1000=1
[PDO_1]
0x1800=CANopen, 1, 0x180 + NodeID, 1, 4
0x1A00=4, ro
0x1A00sub0=2
0x1A00sub1=0x60400010
0x1A00sub2=0x607A0020
参数说明 :
- BaudRate_xxx :设备支持的波特率选项。
- PDO_1 :定义了PDO1的通信参数,包括COB-ID(通信对象标识符)、传输类型、映射项数量等。
- 0x1A00sub1~sub2 :表示映射到PDO1的数据对象,如控制字(0x6040)和目标位置(0x607A)。
逻辑分析 :
- PDO映射决定了哪些对象数据将通过实时数据通道(PDO)传输。
- 合理的PDO配置可以减少通信延迟,提高系统响应速度。
下表总结了典型PDO配置参数:
| 参数名 | 描述 | 常见值 |
|---|---|---|
| COB-ID | 通信对象标识符 | 0x180 + NodeID |
| Transmission Type | 传输类型 | 1(同步) |
| Map Count | 映射对象数量 | 1~8 |
| Object Index | 映射对象的索引地址 | 0x6040, 0x607A等 |
2.3 EDS文件的编辑与验证方法
2.3.1 使用EDS编辑工具的注意事项
EDS文件的编辑通常借助专用工具如CANeds、EDS Editor或厂商提供的配置软件。以下是编辑时的注意事项:
- 格式一致性 :确保每行结构符合INI语法,避免使用中文字符或特殊符号。
- 对象索引正确性 :必须与设备固件中的对象字典一致,否则会导致通信失败。
- PDO映射完整性 :每个PDO映射项应包含正确的对象索引和子索引。
- 权限设置 :确保访问权限(ro/wo/rw)与设备实际行为一致。
例如,使用CANeds编辑器打开EDS文件时,界面会自动校验语法错误并高亮显示:
| 工具名称 | 支持功能 | 推荐使用场景 |
|---|---|---|
| CANeds | 语法检查、对象编辑、导出PDF | 标准CANopen设备开发 |
| TwinCAT EDS Editor | 自动导入设备信息、可视化配置 | Beckhoff PLC用户 |
| SoMachine EDS Editor | 施耐德PLC兼容配置 | 施耐德自动化系统集成 |
2.3.2 常见错误排查与文件完整性验证
在实际应用中,常见的EDS文件错误包括:
- 对象索引不一致 :设备固件与EDS文件定义的对象索引不匹配。
- PDO映射缺失或错误 :未正确映射关键控制字或状态字。
- 波特率不支持 :配置的波特率设备不支持。
- 节点ID冲突 :多个设备使用相同的节点ID。
验证方法包括:
- 使用CANopen主站工具 (如CANalyzer、TwinCAT)加载EDS文件并尝试通信。
- 在线读取设备对象字典 并与EDS文件对比。
- 日志分析 :查看主站通信日志,确认是否出现“对象不存在”或“映射错误”等提示。
- 校验和验证 :部分EDS文件支持Checksum字段,用于验证文件完整性。
示例代码:使用Python脚本验证EDS文件对象索引一致性
import configparser
def validate_eds_file(file_path):
config = configparser.ConfigParser()
config.read(file_path)
# 检查对象字典
if 'Objects' in config:
for key in config['Objects']:
index = key.split('sub')[0] if 'sub' in key else key
print(f"Checking object index: {index}")
# 检查PDO映射
if 'PDO_1' in config:
print("PDO_1 configuration found.")
print("Validation complete.")
validate_eds_file("MPF_Encoder.eds")
逻辑分析 :
- 使用Python的 configparser 模块读取INI格式文件。
- 遍历 [Objects] 节,提取对象索引并输出。
- 检查是否存在PDO配置,确保通信参数完整。
2.4 EDS文件在编码器配置中的实践应用
2.4.1 编码器与PLC之间的参数匹配
在实际应用中,编码器的EDS文件需要与PLC的主站配置保持一致。例如,使用TwinCAT配置Beckhoff MPF系列编码器时,需完成以下步骤:
- 导入EDS文件 :在TwinCAT项目中添加从站设备,并选择对应的EDS文件。
- 设置节点ID :确保与编码器硬件上的拨码开关或配置参数一致。
- 配置PDO映射 :选择需要映射的对象,如位置值(0x6064)、状态字(0x6041)等。
- 下载配置并启动通信 。
下表展示了典型编码器与PLC之间映射的关键参数:
| 编码器对象索引 | 描述 | PLC映射用途 |
|---|---|---|
| 0x6064 | 实际位置值 | 用于位置反馈 |
| 0x6041 | 状态字 | 用于状态监控 |
| 0x607A | 目标位置 | 用于位置控制 |
| 0x6040 | 控制字 | 用于发送控制命令 |
2.4.2 不同设备间EDS文件的兼容性分析
在多厂商设备集成场景中,EDS文件的兼容性尤为关键。主要考虑因素包括:
- 对象字典结构是否一致 :不同厂商可能使用不同的索引命名规则。
- PDO映射是否可自定义 :某些设备允许用户自定义PDO映射,提高兼容性。
- 通信协议版本是否一致 :如CANopen DS-301 v4.02与v4.01之间可能存在差异。
- 厂商ID与产品型号是否匹配 :避免主站误识别设备类型。
建议做法:
- 在系统设计初期统一使用标准EDS模板。
- 使用支持EDS编辑的PLC软件进行设备兼容性测试。
- 对关键参数进行手动比对,确保通信稳定。
本章深入解析了EDS文件在CANopen通信中的核心地位,包括其结构组成、编辑验证方法以及在编码器与PLC配置中的实际应用。下一章将重点介绍MCD系列与MPF系列编码器的具体EDS配置流程,进一步深化对工业通信配置的理解。
3. MCD系列与MPF系列编码器EDS配置说明
在现代工业自动化系统中,编码器作为位置与速度检测的核心组件,其配置与通信参数的设置至关重要。MCD系列与MPF系列编码器广泛应用于各种高端伺服控制系统中,尤其在使用CANopen、EtherCAT等工业总线协议时,其EDS(Electronic Data Sheet)文件的配置成为确保通信稳定与设备互操作性的关键步骤。
本章将围绕MCD与MPF系列编码器的EDS配置流程展开,重点介绍其通信协议特性、EDS文件参数定义、PDO映射机制、常见配置问题以及两者在配置流程上的异同与适用场景。
3.1 MCD系列编码器EDS配置流程
MCD系列编码器通常基于CANopen或EtherCAT协议进行通信,适用于高精度伺服驱动系统。其EDS配置流程主要包括通信协议选择、EDS文件导入、节点参数设置以及PDO映射配置等关键步骤。
3.1.1 MCD系列编码器通信协议概述
MCD系列编码器支持多种工业总线协议,最常见的是CANopen和EtherCAT。CANopen是一种基于CAN总线的高层协议,广泛用于工业自动化领域,支持主从式通信结构;而EtherCAT则是一种高性能实时以太网协议,适用于多轴同步控制。
| 协议类型 | 通信速率 | 传输介质 | 实时性 | 适用场景 |
|---|---|---|---|---|
| CANopen | 125 kbps - 1 Mbps | 屏蔽双绞线 | 中等 | 一般伺服控制 |
| EtherCAT | 100 Mbps | 以太网 | 高 | 多轴同步控制 |
通信协议选择建议:
- 若系统中设备数量不多且对实时性要求一般,建议选择CANopen。
- 若需多轴协同、高响应速度及高精度控制,建议采用EtherCAT。
3.1.2 EDS文件导入与节点参数设置
MCD系列编码器的EDS文件通常由厂商提供,包含对象字典(Object Dictionary)定义、通信参数、PDO映射等信息。配置流程如下:
步骤1:选择并导入EDS文件
在CANopen配置工具(如CANopen Magic、TwinCAT)中,选择对应MCD系列编码器的EDS文件并导入。
; 示例EDS文件片段
[FileInfo]
FileName=MCDEncoder.eds
FileVersion=1.0
说明:
- FileName 表示EDS文件名称;
- FileVersion 表示版本号,确保与硬件兼容。
步骤2:设置节点ID与波特率
进入“Node Settings”页面,设置节点ID(Node ID)和波特率(Baud Rate)。
[Node_Settings]
NodeID=5
BaudRate=500 kbps
参数说明:
- NodeID 是CANopen网络中设备的唯一标识,范围为1~127;
- BaudRate 必须与主站(如PLC)保持一致,避免通信失败。
3.1.3 PDO映射与数据传输配置
PDO(Process Data Object)是CANopen中用于快速数据交换的机制。MCD系列编码器通常使用以下PDO进行位置、速度和状态反馈:
| PDO编号 | 功能说明 | 数据内容 |
|---|---|---|
| TPDO1 | 位置反馈 | 32位位置值 |
| TPDO2 | 速度反馈 | 16位速度值 |
| RPDO1 | 控制命令 | 控制字、目标位置等 |
示例PDO映射配置:
[TPDO1]
COB_ID=180h + NodeID
Number of Mapped Objects=1
0x1A00_00=0x6064:00 32
代码逻辑分析:
- COB_ID 表示该PDO的CAN帧ID,通常为主站ID加上NodeID;
- 0x1A00_00 表示映射对象索引,指向实际数据源;
- 0x6064:00 是对象字典中表示“位置实际值”的索引。
注意事项:
- 必须确保PDO映射与主站PLC程序中配置一致;
- 若未正确映射,将导致数据丢失或通信中断。
3.2 MPF系列编码器EDS配置流程
MPF系列编码器通常用于高性能伺服驱动器,支持多种通信协议,其EDS配置流程与MCD系列类似,但在通信接口特性、参数定义方式以及配置工具支持方面存在差异。
3.2.1 MPF系列编码器通信接口特性
MPF系列编码器主要支持以下通信接口:
- BiSS-C :高速串行接口,适用于单圈编码器;
- SSI(Synchronous Serial Interface) :用于绝对值编码器;
- CANopen/EtherCAT :适用于多轴伺服系统。
| 接口类型 | 通信速率 | 传输方式 | 适用场景 |
|---|---|---|---|
| BiSS-C | 最高10 Mbps | 半双工 | 实时位置反馈 |
| SSI | 最高2 MHz | 主从串行 | 高精度绝对值编码器 |
| CANopen | 1 Mbps | CAN总线 | 多设备通信 |
| EtherCAT | 100 Mbps | 以太网 | 多轴同步控制 |
接口选择建议:
- 若为单轴伺服系统,推荐使用BiSS-C;
- 若需多轴协同控制,建议使用EtherCAT;
- 若仅需位置反馈且无复杂通信需求,可选用SSI接口。
3.2.2 EDS文件的参数定义与功能实现
MPF系列编码器的EDS文件中定义了以下关键参数:
[Object Dictionary]
0x6040:00 Control Word ; 控制字
0x6064:00 Position Actual Value ; 实际位置
0x60FD:00 Digital Inputs ; 数字输入状态
示例参数配置:
[RPDO1]
COB_ID=180h + NodeID
Number of Mapped Objects=1
0x1600_00=0x6040:00 16
代码逻辑分析:
- 0x6040:00 表示控制字,用于发送启停、方向等控制信号;
- 0x1600_00 表示RPDO1中映射的数据对象;
- 16 表示该字段为16位长度。
注意事项:
- 确保PLC程序中控制字的格式与编码器定义一致;
- 若控制字写入失败,可能导致编码器无法响应指令。
3.2.3 配置过程中常见问题与应对策略
问题1:通信中断或节点ID冲突
原因分析:
- 节点ID重复;
- 波特率不一致;
- 硬件连接错误。
解决方法:
- 检查所有节点ID是否唯一;
- 使用示波器或总线分析仪检测通信信号;
- 更换波特率测试通信稳定性。
问题2:PDO映射失败
原因分析:
- EDS文件中PDO映射配置错误;
- 对象字典索引不存在;
- 主站未正确加载EDS文件。
解决方法:
- 检查EDS文件中PDO映射对象索引是否正确;
- 在PLC程序中确认PDO映射是否一致;
- 使用CANopen调试工具(如CANalyzer)监控通信帧。
3.3 MCD与MPF系列EDS配置对比分析
尽管MCD与MPF系列编码器在通信协议和功能上存在相似之处,但其EDS配置流程在协议兼容性、参数设置方式和应用场景上仍有显著差异。
3.3.1 协议兼容性差异
| 项目 | MCD系列 | MPF系列 |
|---|---|---|
| 支持协议 | CANopen、EtherCAT | BiSS-C、SSI、CANopen、EtherCAT |
| EDS文件支持 | 完整支持 | 部分接口(如BiSS-C)不依赖EDS |
对比分析:
- MCD系列主要依赖EDS文件进行通信配置;
- MPF系列部分接口(如BiSS-C)无需EDS文件,直接通过硬件连接即可通信。
3.3.2 参数设置的异同点
| 参数项 | MCD系列 | MPF系列 |
|---|---|---|
| 节点ID设置 | 必须通过EDS配置 | 可通过硬件拨码或软件设置 |
| PDO映射 | 依赖EDS文件 | 依赖EDS文件(CANopen/EtherCAT) |
| 控制字定义 | 固定格式 | 可自定义部分字段 |
说明:
- MCD系列的参数配置高度依赖EDS文件;
- MPF系列在部分接口下支持更灵活的参数设置方式。
3.3.3 应用场景下的选择建议
| 应用需求 | 推荐系列 | 原因 |
|---|---|---|
| 多轴同步控制 | MCD系列 | 支持EtherCAT,适用于高速同步 |
| 单轴高精度控制 | MPF系列 | 支持BiSS-C,响应速度快 |
| 低成本应用 | MPF系列 | 支持SSI,无需复杂通信 |
| 需要EDS文件管理 | MCD系列 | 通信配置完全依赖EDS |
建议:
- 若系统要求高度标准化与可维护性,建议选择MCD系列;
- 若对通信速度与响应时间要求极高,MPF系列更为合适。
本章系统介绍了MCD与MPF系列编码器的EDS配置流程,涵盖了通信协议选择、EDS文件导入、节点参数设置、PDO映射机制以及常见配置问题的解决策略。通过对比分析,明确了两种编码器在配置方式与应用场景上的差异,为后续章节中PLC集成与通信优化打下坚实基础。
4. 通信参数设置与PLC集成配置
在工业自动化系统中,编码器与PLC之间的稳定通信是确保运动控制精度和系统响应速度的关键。本章将围绕 通信参数的设置 、 不同版本编码器通信协议的差异 、 PLC集成配置流程 以及 CA_LiftProfile配置文件的应用 四个方面展开详细解析。通过本章内容,读者将掌握从参数配置到系统集成的完整流程,并理解不同通信协议版本对EDS文件配置的影响。
4.1 通信参数的基本概念与设置方法
4.1.1 波特率、数据位、停止位与校验位的作用
在串行通信中,通信参数是确保编码器与PLC之间数据传输准确性的基础。以下是常见通信参数的作用说明:
| 参数名称 | 作用描述 |
|---|---|
| 波特率 | 表示每秒传输的数据位数(bps),如9600、19200、38400等,用于设定数据传输速度 |
| 数据位 | 每个字符中实际数据位的数量,通常为7或8位 |
| 停止位 | 标志一个字符传输结束的位数,一般为1或2位 |
| 校验位 | 用于数据校验的附加位,可选无校验(None)、奇校验(Odd)、偶校验(Even) |
4.1.2 通信参数对数据传输稳定性的影响
若通信参数设置不当,可能导致数据丢包、通信中断或误码率升高。例如:
- 波特率不匹配会导致接收端无法正确解析数据;
- 数据位或停止位设置错误会导致帧格式错误;
- 校验位设置不一致将导致校验失败,影响数据完整性。
4.1.3 实际配置中参数的推荐值与调试技巧
在实际应用中,推荐以下默认通信参数组合:
波特率:19200
数据位:8
停止位:1
校验位:None
调试技巧建议:
- 一致性检查 :确保编码器与PLC端的通信参数完全一致;
- 使用串口调试工具 :如Tera Term、XCOM等,实时查看通信数据;
- 逐步调试 :先设置基础参数(如波特率),再逐步调整其他参数;
- 日志记录 :启用PLC或HMI的通信日志功能,便于排查异常。
4.2 ST与MT版本通信参数差异分析
4.2.1 ST版本通信协议特点
ST版本(Standard)是较为传统的通信协议版本,主要特点包括:
- 使用 标准CANopen协议栈 ;
- 支持 基本PDO映射 ;
- 通信参数配置较为简单;
- EDS文件结构较为固定,适合通用型应用。
4.2.2 MT版本通信协议特性
MT版本(Multi-Track)是为多通道编码器设计的高级版本,其特点如下:
- 支持 多通道数据采集 ;
- 具备 高级PDO映射功能 ;
- 支持 同步多轴控制 ;
- EDS文件结构更复杂,需定义多个对象字典项;
- 通信参数更灵活,支持多种波特率与数据格式。
4.2.3 版本差异对EDS配置的影响
由于MT版本具备更强的通信能力和灵活性,其EDS文件的配置相较ST版本更为复杂:
- 对象字典结构差异 :MT版本通常包含多个子节点,每个子节点对应一个通道;
- PDO映射方式不同 :MT版本支持更复杂的PDO映射策略,以实现多通道数据并行传输;
- 通信参数可调性增强 :MT版本支持用户自定义通信速率和数据格式。
示例代码:MT版本PDO映射配置(EDS片段)
[1600]
ParameterName=Receive PDO 1 mapping parameters
ObjectType=0x9
; 子项0表示映射项数量
[1600sub0]
ParameterName=Number of mapped objects
ObjectType=0x7
DataType=0x0005
AccessType=rw
DefaultValue=2
; 子项1映射位置信息
[1600sub1]
ParameterName=Position value
ObjectType=0x7
DataType=0x1010
BitLength=32
ValueFactor=1
代码逻辑分析:
[1600]定义了接收PDO1的映射参数对象;sub0表示映射项数量为2;sub1映射位置信息,使用数据类型0x1010(32位整数);- BitLength=32表示该数据项占用32位;
- ValueFactor=1表示数据值无需转换。
4.3 编码器与PLC通信配置流程详解
4.3.1 硬件连接与电气接口规范
编码器与PLC之间的通信通常采用 CANopen总线 或 EtherCAT 接口。以CANopen为例,硬件连接需注意以下几点:
- 使用标准CAN_H和CAN_L信号线;
- 终端电阻需在总线两端各接一个120Ω电阻;
- 确保电源供电稳定,避免电压波动造成通信中断。
CANopen电气接口规范简表:
| 引脚编号 | 信号名称 | 功能描述 |
|---|---|---|
| 1 | CAN_L | CAN低电平信号线 |
| 2 | GND | 地 |
| 3 | V+ | 电源正极 |
| 4 | CAN_H | CAN高电平信号线 |
4.3.2 软件层面通信参数设定
在PLC软件中配置通信参数时,需进入设备配置界面,设定节点ID、通信速率、PDO映射等关键参数。
以TIA Portal为例,配置步骤如下:
- 打开设备视图,添加编码器设备;
- 设置节点ID(Node ID);
- 在“CANopen”选项中设定波特率(Baud Rate);
- 配置PDO映射关系,确保接收和发送数据正确对应;
- 下载配置至PLC并启动设备。
4.3.3 数据交换测试与通信状态监控
完成配置后,需进行通信测试以确保数据交换正常。可通过以下方式进行:
- 在线监控 :在PLC程序中添加监控窗口,查看PDO数据;
- 状态指示灯 :查看编码器与PLC的状态灯,绿色表示通信正常;
- 日志分析 :记录通信中断或错误信息,便于后期排查。
示例代码:PLC中读取编码器位置值(ST语言)
PROGRAM PLC_PRG
VAR
enc_pos: DINT := 0;
END_VAR
// 读取编码器位置值(假设映射到PDO1)
enc_pos := ADR(PdoIn1.PosValue^);
代码解释:
PdoIn1.PosValue是PDO1中映射的位置值地址;- 使用
ADR()函数获取地址内容; DINT表示32位整数类型,用于存储位置值。
4.4 CA_LiftProfile配置文件的应用场景
4.4.1 CA_LiftProfile配置简介
CA_LiftProfile是一种专为升降控制系统设计的标准化配置文件,常用于电梯、升降平台等应用场景。该配置文件定义了:
- 位置、速度、加速度控制参数;
- 运动曲线配置;
- 多轴同步控制逻辑;
- 安全控制机制(如急停、限位检测)。
4.4.2 在升降控制中的典型应用
在电梯控制系统中,CA_LiftProfile配置文件通常用于:
- 楼层定位 :精确控制电梯到达目标楼层;
- 软启动/软停 :实现平稳启停,提升乘坐舒适度;
- 多楼层调度 :根据呼叫信号动态调整运行路径;
- 安全防护 :自动识别超速、卡阻等异常情况。
4.4.3 配置文件对运动控制精度的提升作用
CA_LiftProfile通过以下方式提升控制精度:
- 高分辨率位置反馈 :结合绝对式编码器提供毫米级定位;
- 动态速度曲线调整 :根据负载和运行距离优化速度曲线;
- 同步控制机制 :确保多个升降轴同步运行;
- 自适应补偿机制 :对机械误差进行实时补偿。
流程图:CA_LiftProfile控制流程
graph TD
A[启动升降] --> B{是否有呼叫信号?}
B -->|是| C[计算目标楼层]
C --> D[加载CA_LiftProfile参数]
D --> E[执行升降运动]
E --> F[实时监控位置与速度]
F --> G{是否到达目标楼层?}
G -->|是| H[停止电机]
H --> I[完成]
G -->|否| J[继续执行]
J --> F
B -->|否| K[进入待机状态]
本章内容围绕 通信参数配置 、 ST/MT版本差异 、 PLC集成流程 以及 CA_LiftProfile配置文件 展开,系统地介绍了编码器与PLC之间通信配置的完整技术路径。下一章将深入探讨设备诊断信息的获取与工业4.0背景下的系统优化策略。
5. 设备诊断信息与工业4.0集成优化
5.1 编码器故障诊断与信息反馈机制
5.1.1 故障代码与错误信息解读
绝对旋转式编码器在运行过程中可能会出现多种故障,例如供电异常、通信中断、码盘损坏等。为了便于维护和快速定位问题,现代编码器通常内置故障诊断模块,能够输出结构化的故障代码。这些代码通常通过通信总线(如CANopen或EtherCAT)返回,并在PLC或上位系统中进行解析。
例如,以下是一个基于CANopen协议的故障代码示例:
typedef enum {
NO_ERROR = 0x00,
OVER_VOLTAGE = 0x01,
UNDER_VOLTAGE = 0x02,
COMMUNICATION_FAILURE = 0x03,
ENCODER_FAILURE = 0x04,
RESERVED = 0xFF
} EncoderErrorCode;
在PLC程序中,可以通过读取对象字典中特定索引(如0x2001)来获取当前故障状态:
UINT16 errorCode = readCANopenObject(encoderNodeID, 0x2001, 0x00);
encoderNodeID:编码器节点ID。0x2001:故障代码对象索引。0x00:子索引,通常用于区分多通道设备。
5.1.2 日志记录与异常状态分析
为了提升系统维护效率,建议在PLC或上位系统中启用日志记录功能。可以记录以下信息:
| 时间戳 | 节点ID | 故障代码 | 故障描述 | 操作建议 |
|---|---|---|---|---|
| 2025-04-05 10:12:34 | 0x05 | 0x03 | 通信中断 | 检查CAN线连接 |
| 2025-04-05 10:15:02 | 0x05 | 0x04 | 编码器损坏 | 更换编码器 |
日志可以通过OPC UA或MQTT协议上传至SCADA系统或MES系统,实现集中监控。
5.1.3 基于EDS文件的诊断参数配置
在EDS文件中,可以定义用于诊断的参数对象。例如,在 [Objects] 段中添加:
[16#2001]
ParameterName=Encoder Error Code
ObjectType=0x7
DataType=0x0005
AccessType=ro
DefaultValue=0
PDOMapping=0
ObjectType=0x7表示该对象是一个32位无符号整数。AccessType=ro表示只读。DefaultValue=0初始值为0。
通过EDS配置后,PLC或HMI系统可以自动识别该参数,并在出现故障时触发警报或记录日志。
5.2 工业4.0背景下编码器的智能化集成
5.2.1 编码器在智能制造系统中的定位
在工业4.0体系中,编码器不仅是角度检测设备,更是数据采集节点。通过EtherCAT或PROFINET等高性能工业以太网协议,编码器可以将位置、速度、温度、振动等数据实时上传至MES系统。
5.2.2 与MES、SCADA系统的数据交互
编码器可通过OPC UA协议与MES系统进行数据交互,例如:
from opcua import Client
client = Client("opc.tcp://192.168.0.10:4840")
client.connect()
encoder_node = client.get_node("ns=2;s=Encoder01.Position")
position = encoder_node.get_value()
print(f"Current Position: {position} degrees")
ns=2;s=Encoder01.Position:表示MES系统中注册的编码器节点路径。get_value():获取当前角度值。
该机制实现了编码器数据的可视化与远程控制。
5.2.3 边缘计算与远程诊断功能实现
借助边缘网关(如西门子SIMATIC IOT2000或研华WISE-4000),编码器数据可以在本地进行预处理和分析,再上传至云端系统。例如,通过边缘设备执行如下逻辑:
graph TD
A[编码器] --> B(边缘网关)
B --> C{是否超限?}
C -->|是| D[触发本地警报]
C -->|否| E[上传至云端]
D --> F[发送短信通知]
E --> G[历史数据分析]
这种结构降低了网络负载,提高了响应速度,增强了系统智能化水平。
5.3 运动控制系统中的优化策略
5.3.1 多轴同步控制的关键技术
在多轴运动控制系统中,绝对值编码器的同步精度直接影响整机性能。同步控制通常依赖于分布式时钟(DC)机制,确保各轴采样时间一致。例如在EtherCAT系统中启用DC同步:
<Device>
<SyncManager>
<EnableDC>true</EnableDC>
<CycleTime>1ms</CycleTime>
</SyncManager>
</Device>
EnableDC=true:启用分布式时钟同步。CycleTime=1ms:设定同步周期为1毫秒。
5.3.2 提高编码器响应速度与精度的方法
提升响应速度可从以下方面入手:
- 采样频率优化 :设置更高的编码器输出频率,例如从1kHz提升至10kHz。
- 通信协议优化 :使用高性能通信协议(如EtherCAT),减少数据延迟。
- 信号滤波处理 :在PLC中使用滑动平均滤波算法,减少抖动。
5.3.3 基于工业以太网的高性能通信方案
EtherCAT因其低延迟、高带宽的特点,广泛应用于高速运动控制系统中。其典型通信架构如下:
graph LR
A[PLC控制器] --> B(EtherCAT主站)
B --> C(EtherCAT从站1 - 编码器1)
B --> D(EtherCAT从站2 - 编码器2)
B --> E(...其他从站)
在PLC程序中配置EtherCAT通信示例(基于TwinCAT):
PROGRAM PLC_PRG
VAR
enc1_pos: REAL;
enc2_pos: REAL;
END_VAR
// 读取编码器位置
enc1_pos := ADR(EtherCAT_Slave1.Position);
enc2_pos := ADR(EtherCAT_Slave2.Position);
// 执行同步控制逻辑
IF ABS(enc1_pos - enc2_pos) > TOLERANCE THEN
// 触发同步校正
CorrectAxisAlignment();
END_IF;
TOLERANCE:设定允许的位置偏差阈值。CorrectAxisAlignment():同步校正函数。
5.4 案例分析:编码器在智能生产线的应用
5.4.1 某自动化装配线的编码器部署方案
在某汽车零部件装配线上,部署了12个MCD系列绝对值编码器,用于监测各轴位置与速度。其配置如下:
| 编码器编号 | 安装位置 | 通信协议 | 功能描述 |
|---|---|---|---|
| ENC01 | 主轴电机 | EtherCAT | 实时位置反馈 |
| ENC02 | 送料机构 | CANopen | 速度监测 |
| ENC03 | 定位夹具 | PROFINET | 定位精度控制 |
| … | … | … | … |
所有编码器通过边缘网关接入MES系统,实现集中监控。
5.4.2 实际运行中的性能评估与优化调整
在试运行阶段,发现部分编码器存在通信延迟问题,经排查发现:
- 问题1 :部分节点通信周期设置不一致。
- 问题2 :PLC扫描周期与编码器更新周期不匹配。
优化措施:
- 统一所有编码器通信周期为1ms。
- 调整PLC扫描周期至5ms,确保数据采集完整。
优化后,系统响应时间降低40%,同步误差减少至±0.05°。
5.4.3 未来升级路径与维护建议
未来升级建议:
- 引入AI算法进行异常预测,基于历史数据训练模型。
- 部署5G通信模块,实现远程维护与数据上传。
- 增加冗余编码器配置,提高系统容错能力。
维护建议:
- 定期导出EDS文件并备份配置。
- 监控通信状态日志,及时发现潜在问题。
- 对关键节点进行定期校准和清洁维护。
简介:FRABA绝对旋转式编码器在工业自动化中用于精准测量旋转位置、速度和角加速度。其配套的EDS文件(电子数据表)用于定义设备通信参数,确保编码器与控制系统(如PLC)之间的稳定交互。本资料包含多个EDS配置文件,分别适用于不同型号和应用场景,如MCD和MPF系列的标准(ST)与电机(MT)版本,以及专用于升降设备的CA_LiftProfile配置。通过合理选用EDS文件,工程师可高效集成编码器至自动化系统,实现高精度运动控制和系统诊断,助力智能制造和工业4.0应用。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 28
28 0
0- 0



 已为社区贡献175条内容
已为社区贡献175条内容

所有评论(0)