红外小目标检测新突破!YOLO‑HVS:受人类视觉启发,精准抗遮挡、实时更高效
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的论文算法新框架,提供论文一键下载,并分享实战项目。SSMA-YOLO:一种轻量级的 YOLO 模型,具备增强的特征提取与融合能力,适用于无人机航拍的船舶图像检测。,基于 YOLOv8 融合人类视觉系统(HVS)特性,在复杂遮挡、低信噪比下实现高精度、轻量化实时检测
点击蓝字
关注我们
关注并星标
从此不迷路
计算机视觉研究院

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
https://pmc.ncbi.nlm.nih.gov/articles/PMC12293038/pdf/biomimetics-10-00451.pdf
计算机视觉研究院专栏
Column of Computer Vision Institute
在无人机巡检、安防监控、军事预警等场景中,红外小目标检测因目标像素少、纹理缺失、易被背景噪声淹没,一直是技术难题。近日,山东理工大学团队提出YOLO‑HVS 算法,基于 YOLOv8 融合人类视觉系统(HVS)特性,在复杂遮挡、低信噪比下实现高精度、轻量化实时检测。
PART/1
痛点
核心痛点:红外小目标检测的两大难题
- 背景干扰强:植被、阴影、热噪声易造成误检,小目标被遮挡后特征丢失。
- 多尺度提取难:无人机飞行高度变化,目标尺寸跨度大,常规模型难以兼顾。
现有算法要么精度不足,要么参数量大、速度慢,无法满足实时部署需求。
PART/2
方案
创新方案:两大核心模块,精准攻克难题
团队以 YOLOv8 为基线,打造YOLO‑HVS架构,核心升级两大模块:
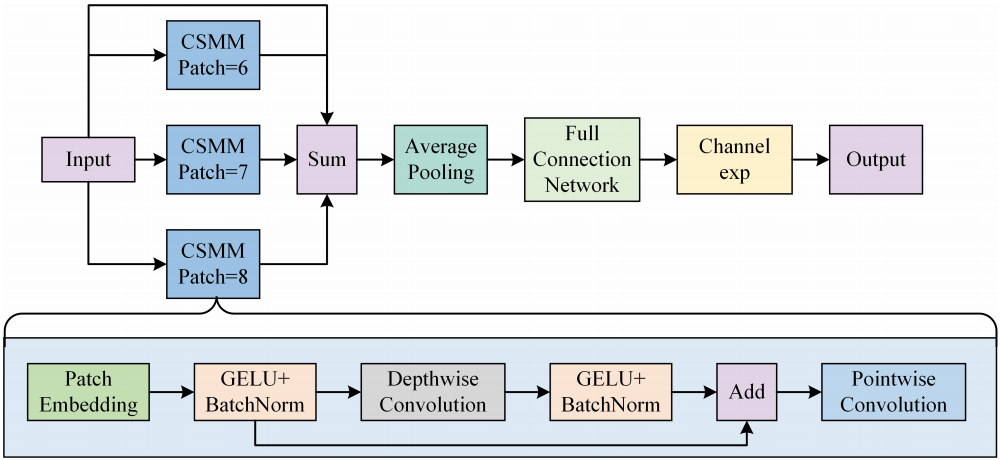
1. MultiSEAM 多尺度空间增强注意力模块
-
采用三分支并行(patch=6/7/8),兼顾局部细节与全局上下文。
-
深度可分离卷积提取空间特征,逐点卷积融合通道信息。
- 抑制背景噪声、增强被遮挡目标特征
,解决遮挡导致的漏检问题。
MultiSEAM 结构示意图
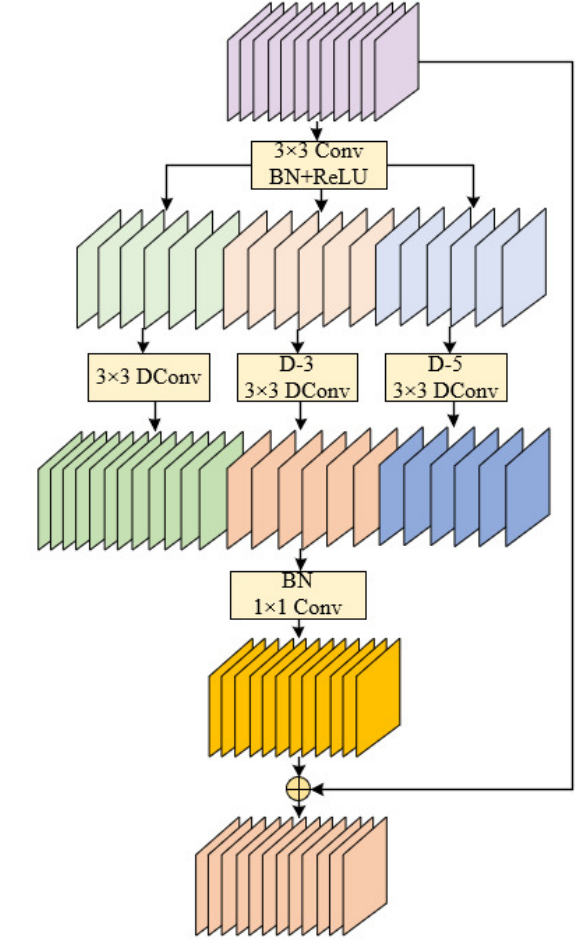
2. C2f_DWR 区域语义双残差模块
-
替换 YOLOv8 原 C2f 模块,用膨胀卷积 + 双阶段残差(区域残差→语义残差)。
-
扩大感受野,高效捕获多尺度上下文,降低计算量、提升检测效率。
DWR 模块网络结构
PART/3
数据集
数据集:自建更贴合真实场景
为验证泛化性,团队构建DroneRoadVehicles 红外数据集:
-
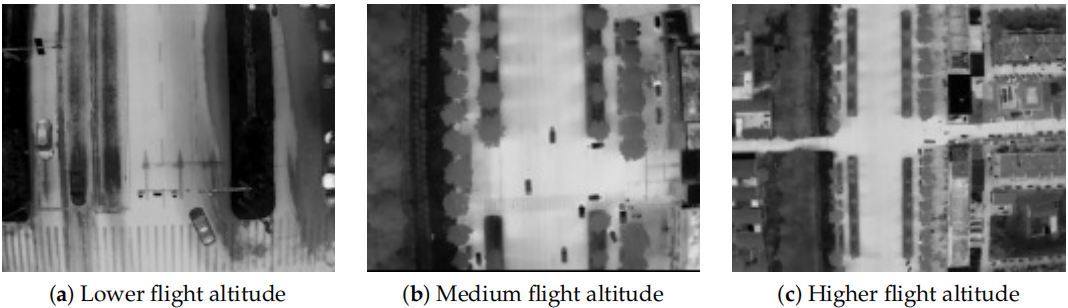
1028 张红外图像,拍摄高度 70–300m,覆盖大 / 中 / 小多尺度目标。
-
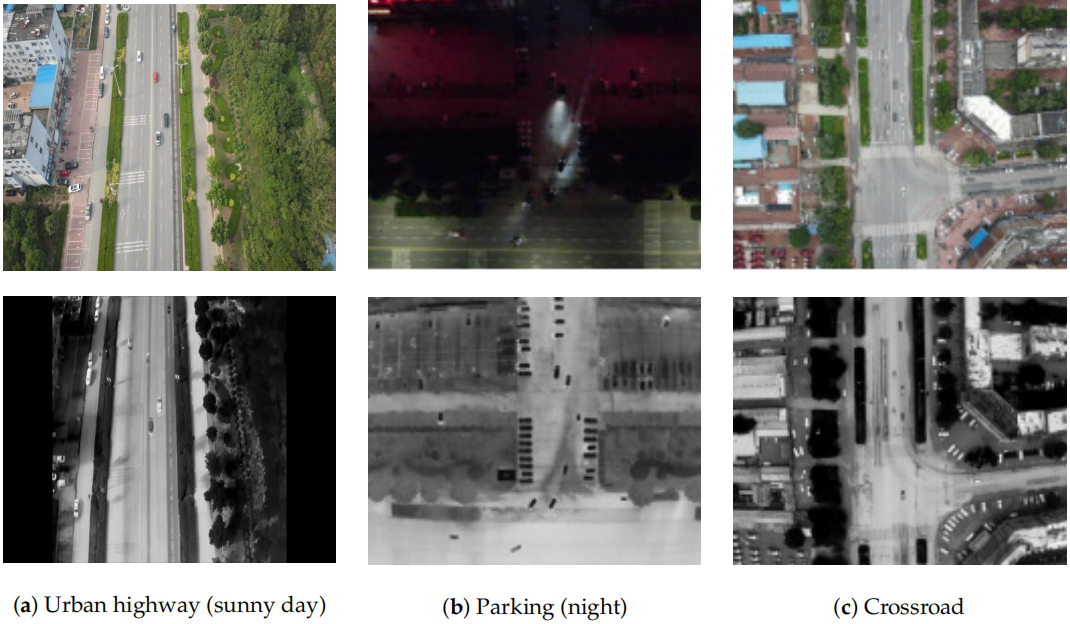
包含高速、停车场、十字路口等复杂场景,昼夜、晴雾天气全覆盖。
多场景示例
不同高度对比
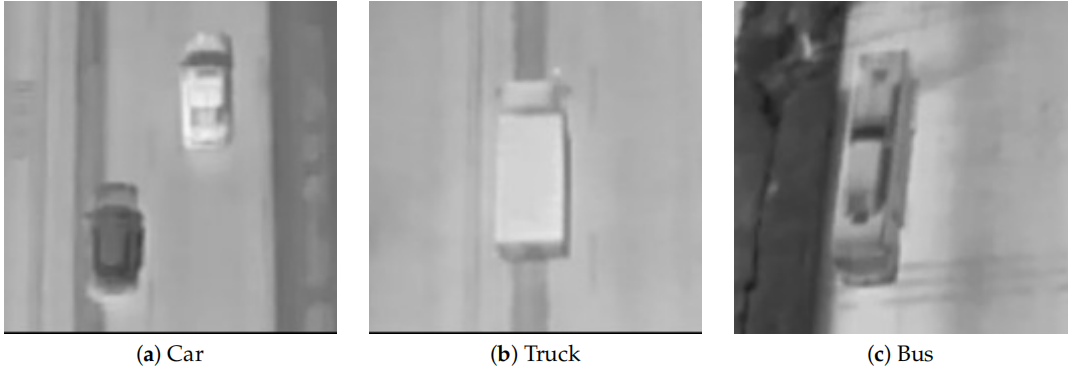
目标类别
PART/4
实验结果
实验结果:精度提升、轻量高效
团队在公开数据集DroneVehicle与自建数据集上全面测试:
1. 关键指标(对比 YOLOv8)
-
DroneVehicle:mAP50 达 83.4%,提升 1.1%;参数量仅增 2.3M,GFLOPs 仅增 0.1G。
-
自建数据集:mAP50 达 97.8%,提升 0.7%,遮挡与低信噪比场景优势显著。

DroneVehicle 对比结果

自建数据集对比结果
2. 消融实验验证
-
MultiSEAM:提升抗遮挡能力,mAP50+0.4%。
-
C2f_DWR:优化多尺度提取,降低计算量 3.7%。
-
组合使用:精度与效率双优。
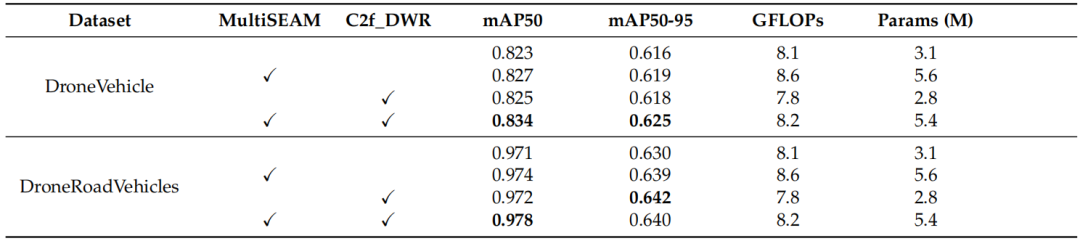
消融实验结果
3. 可视化对比
-
小目标 + 强噪声场景:YOLOv8 漏检,YOLO‑HVS 精准检出。
-
常规目标:检测置信度显著更高,输出更可靠。
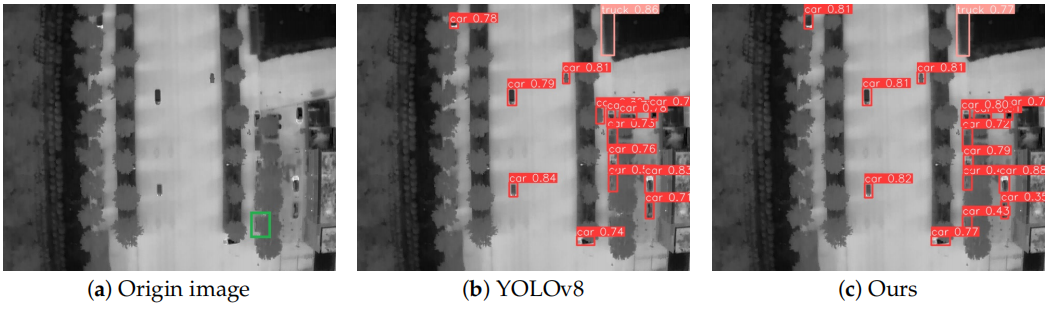
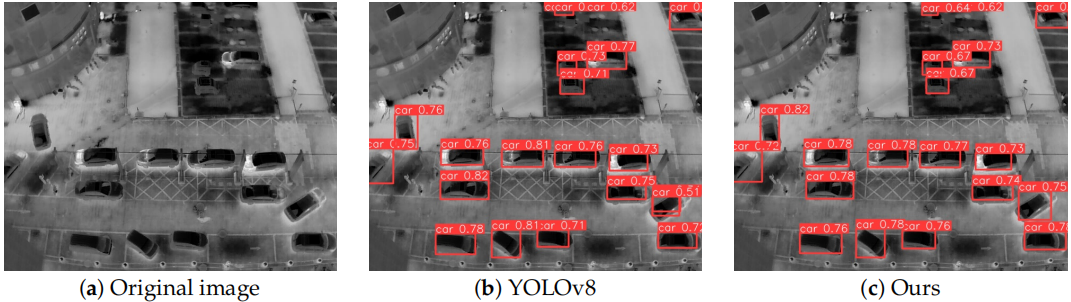
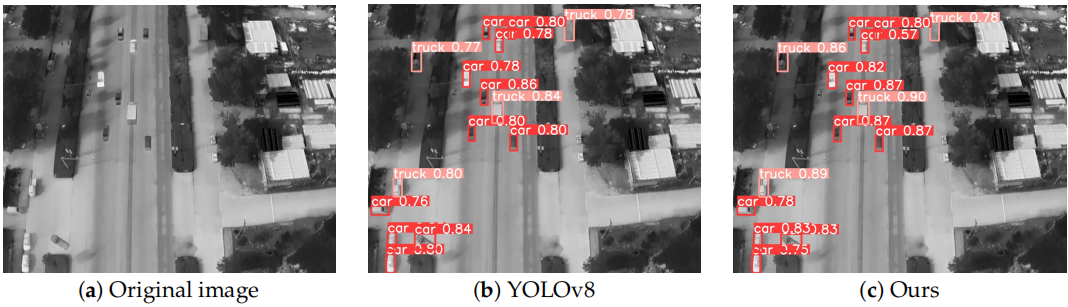
检测效果对比图
PART/5
总结
YOLO‑HVS 以人类视觉机制为灵感,通过 MultiSEAM 与 C2f_DWR 双模块升级,在红外小目标、复杂遮挡、多尺度变化三大难点上实现突破,同时保持轻量化与实时性。
未来团队将进一步研究动态感受野调整,适配极端尺度变化场景,为无人机红外监控、安防预警等落地提供更强技术支撑。
有相关需求的你可以联系我们!


END

转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的论文算法新框架,提供论文一键下载,并分享实战项目。研究院主要着重”技术研究“和“实践落地”。研究院会针对不同领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!
往期推荐
🔗

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐
 13
13 0
0- 0



 已为社区贡献32条内容
已为社区贡献32条内容

所有评论(0)